
曲线插值的方法是按照车辆在某些特定条件(安全、快i速、高效)下,进行路径的曲线拟合,常见的有多项式曲线、双圆弧段曲线、正弦函数曲线、贝塞尔曲线、B样条曲线等。
1.算法思想:
曲线插值法的核心思想就是基于预先构造的曲线类型,根据车辆期望达到的状态(比如要求车辆到达某点的速度和加速度为期望值),将此期望值作为边界条件代入曲线类∶型进行方程求解,获得曲线的相关系数。
曲线所有的相关系数一旦确定,轨迹规划随之完成。

2. 算法精讲
2.1 多项式曲线
下面以多项式曲线为例讲解曲线插值法轨迹规划。
多项式曲线分为三次多项式曲线、 五次多项式曲线、 七次多项式曲线
- 针对三次多项式曲线,最多能确定每一个期望点的两个维度的期望状态,一般来说就是位置和速度。

- 针对五次多项式曲线,最多能确定每一个期望点的三个维度的期望状态,一般来说就是位置、速度、加速度。

- 针对七次多项式曲线,最多能确定每一个期望点的四个维度的期望状态,一般来说就是位置、速度、 加速度、加加速度(加加速度称为
jerk,加加加速度称为snap,无人机轨迹规划中有用到snap)

3.五次多项式曲线
以五次多项式曲线为例讲解曲线揷值法轨迹规划。
设t0为初始时间,位置、速度、加速度均已知,显然x 和 y x和yx和y方向分别有以下三个方程:
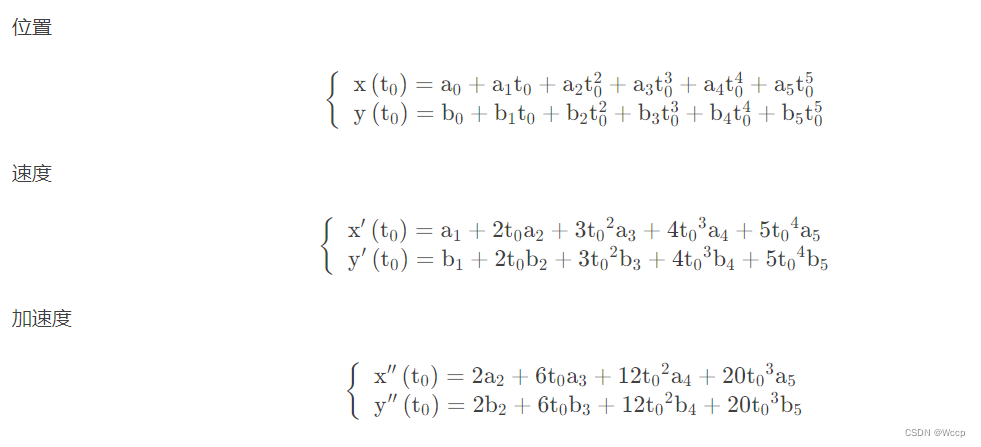
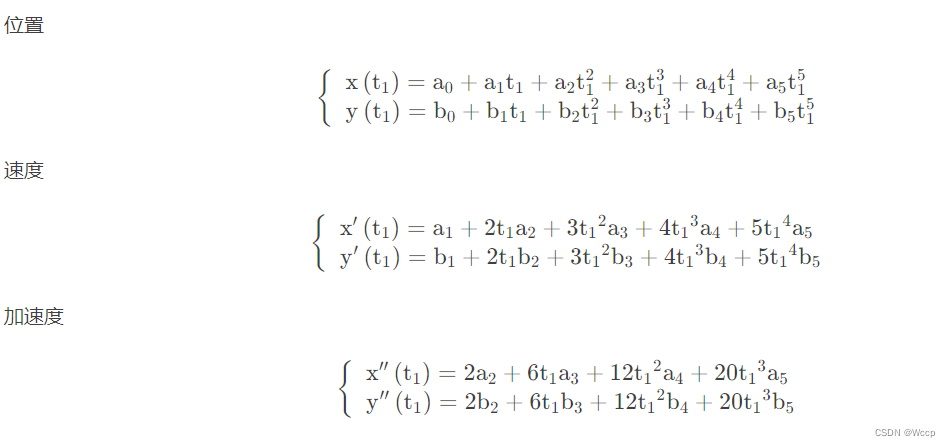
定义换道终点时间为 t1,横纵向(即x , y x,yx,y方向)均有期望的位置、速度、 加速度,又分别可以得到以下三个方程:
把起末两点的横纵向方程统一用矩阵表达为:
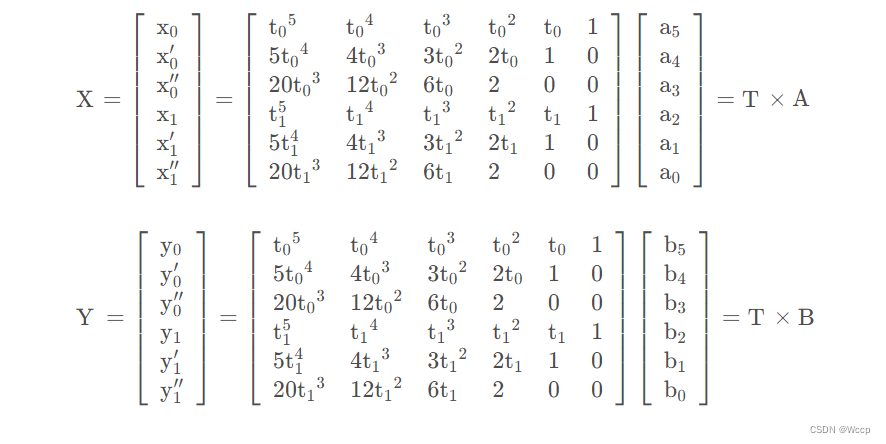
多项式曲线的自变量为时间t,故一旦求解出系数矩阵A ,B,即可确定曲线方程(说白了,求系数的方法就是我们初中学过的待定系数法)。曲线唯一确定后, 则曲线上每一点的位置、速度等便确定了,轨迹即可求出。曲线上每一点的导数就代表了车辆经过该点时的速度,表明多项式曲线换道轨迹规划是路径+速度的耦合结果。
注意,五次多项式换道轨迹曲线特指横向位置/纵向位置是关于时间t的五次多项式,而不是指纵向位置y关于横向位置x的五次多项式。
4.双圆弧段曲线
如图,对于双圆弧段换道轨迹,它由弧AC+线段CD+弧DF构成。
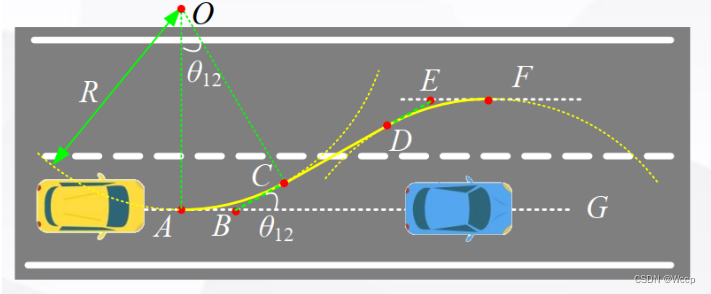
显然,在C点,轨迹曲率由弧AC段的定值突变为0,故为了让车辆能完全跟随轨迹, 考虑到方向盘转角是一个连续缓变过程,车辆行驶到在C点后必须速度为0, 让方向盘回正后才能继续行驶,因此无法应用于行车路径规划,而应用于泊车路径规划。