模块选择:
stm32f103c8芯片
HC-SR04超声波测距模块
一、HC-SR04超声波测距模块说明
1、产品特点
HC-SR04 超声波测距模块可提供 2cm-400cm 的非接触式距离感测功能,测距精度可达高到 3mm;模块包括超声波发射器、接收器与控制电路。
基本工作原理:
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声
波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。
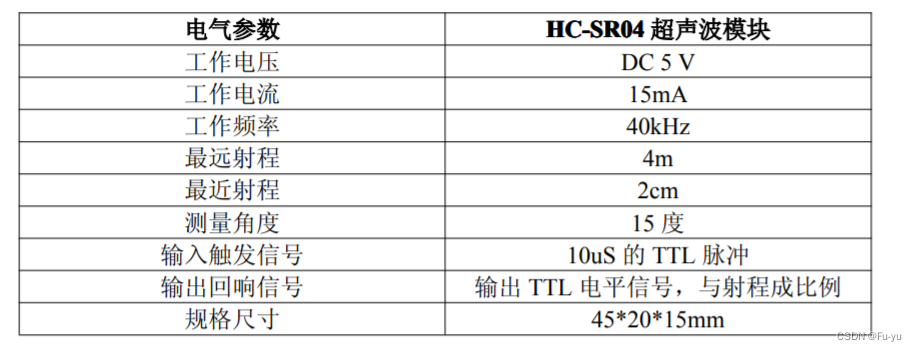
2、电气参数
3、HC-SR04超声波测距模块
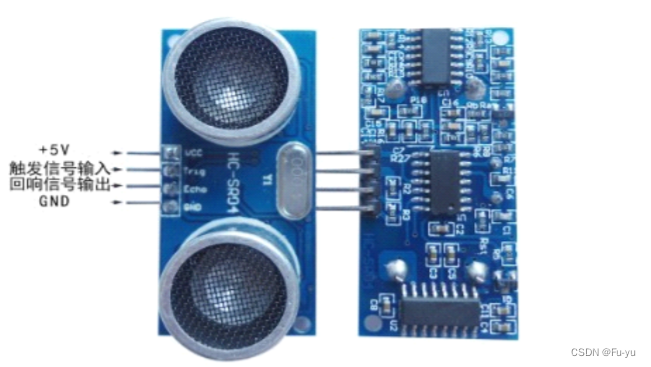
VCC 供 5V电源,GND 为地线,TRIG 触 发 控 制 信 号 输入,ECHO 回响信号输出等四个接口端。
4、超声波时序图
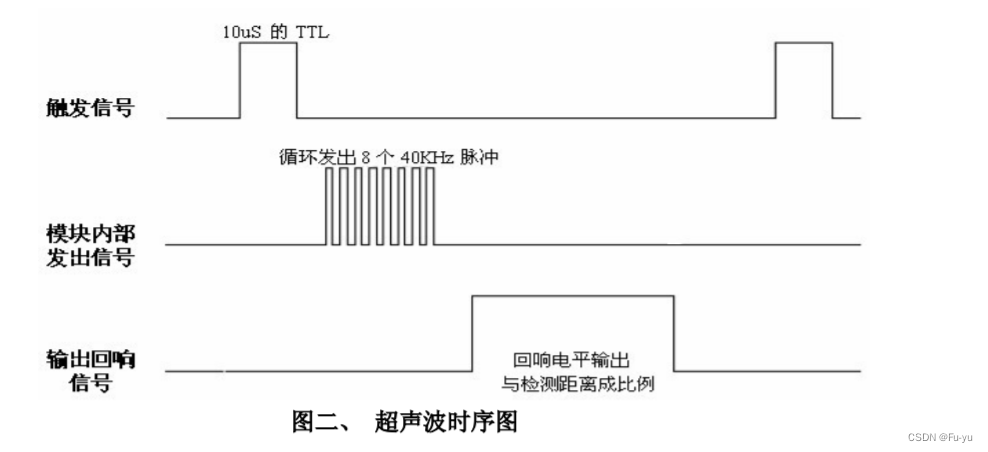
以上时序图表明你只需要提供一个 10uS 以上脉冲触发信号,该模块内部将
发出 8 个 40kHz 周期电平并检测回波。一旦检测到有回波信号则输出回响信号。
回响信号的脉冲宽度与所测的距离成正比。由此通过发射信号到收到的回响信号
时间间隔可以计算得到距离。公式:uS/58=厘米或者 uS/148=英寸;或是:距离= 高电平时间*声速(340M/S)/2;建议测量周期为 60ms 以上,以防止发射信号对
回响信号的影响。
注:
1、此模块不宜带电连接,若要带电连接,则先让模块的 GND 端先连接,否则会影响模块的正常工作。
2、测距时,被测物体的面积不少于 0.5 平方米且平面尽量要求平整,否则影响测量的结果
二、 CUBEMX配置
配置rcc
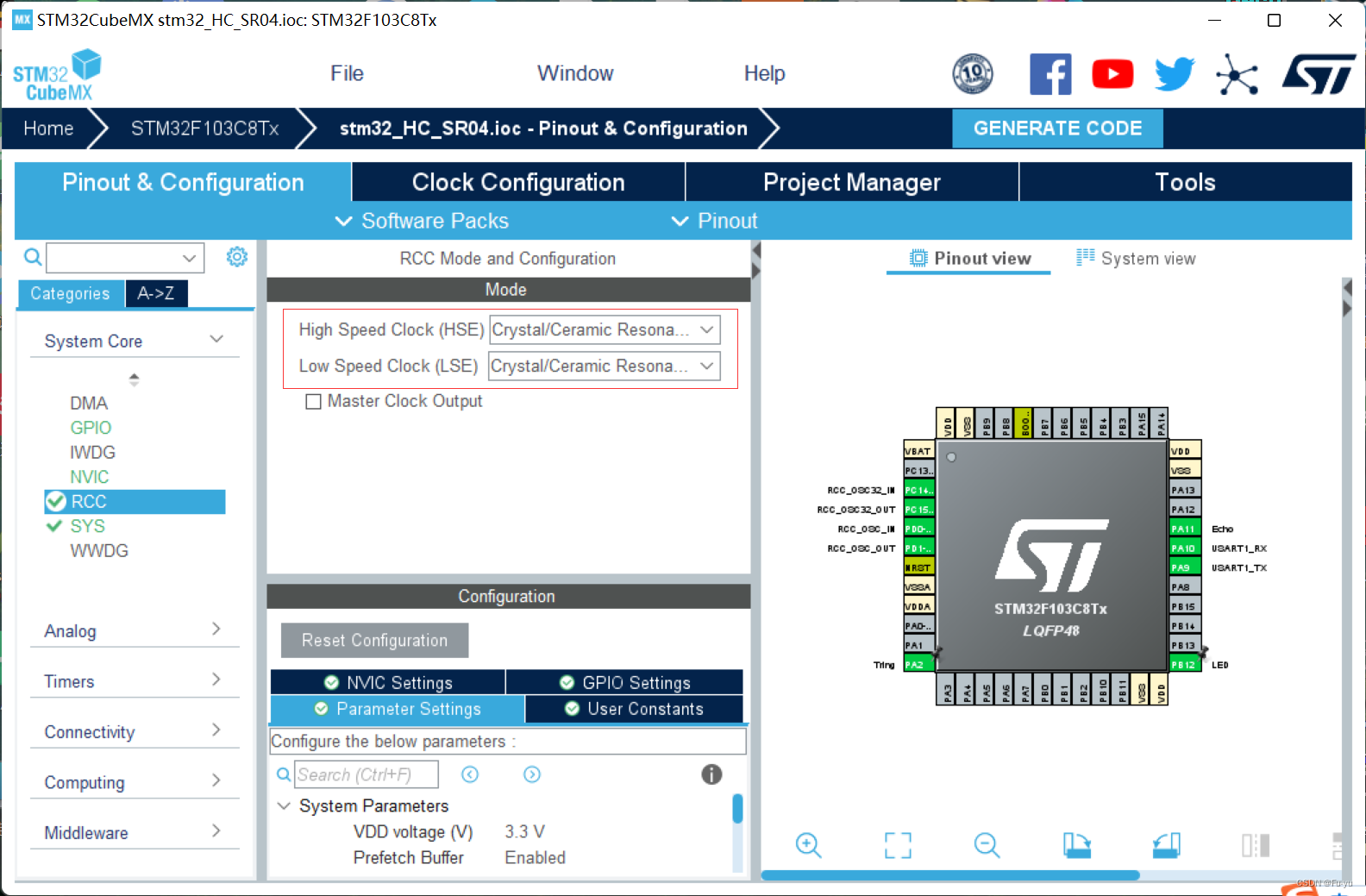
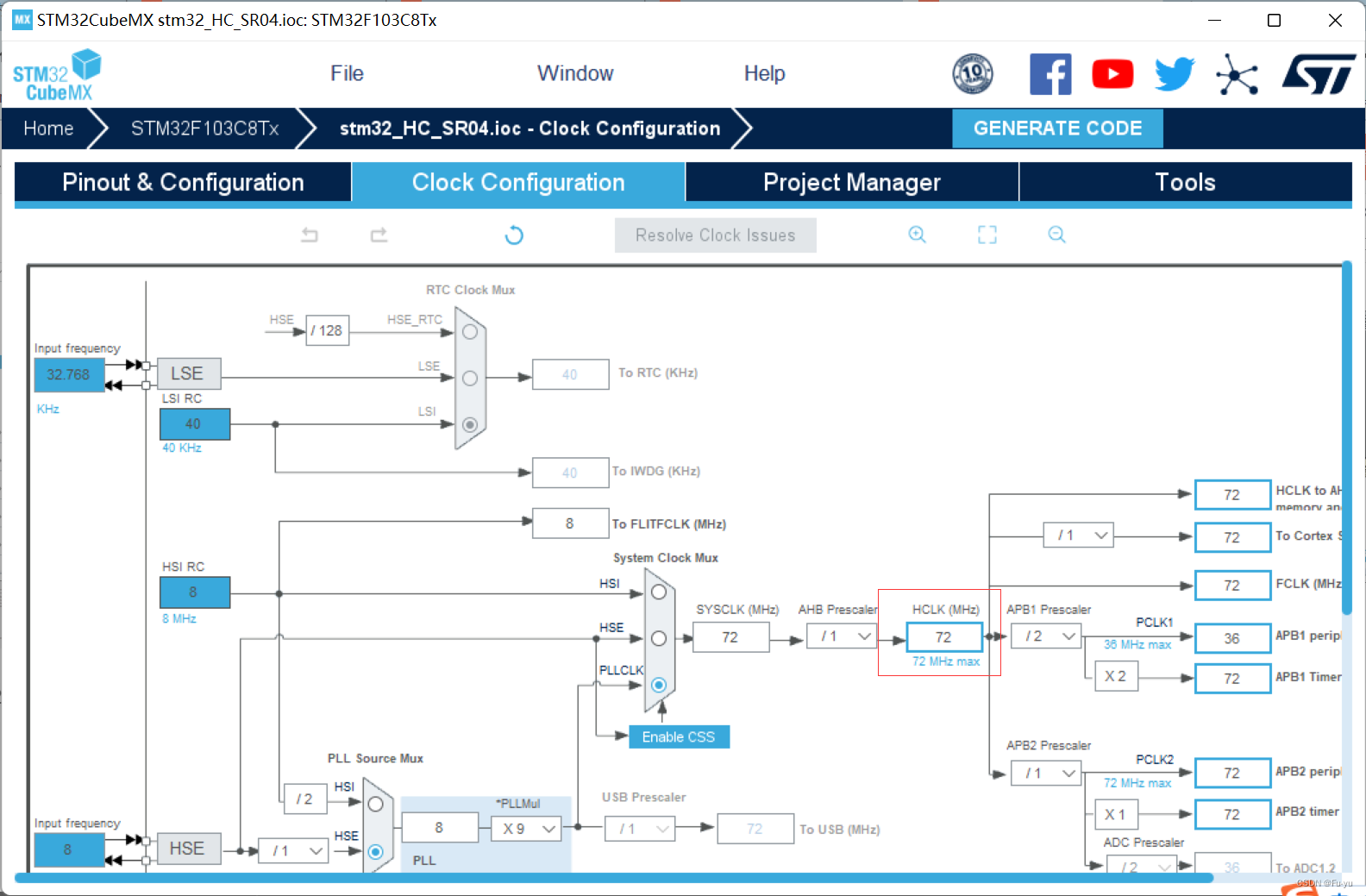
设置时钟为72
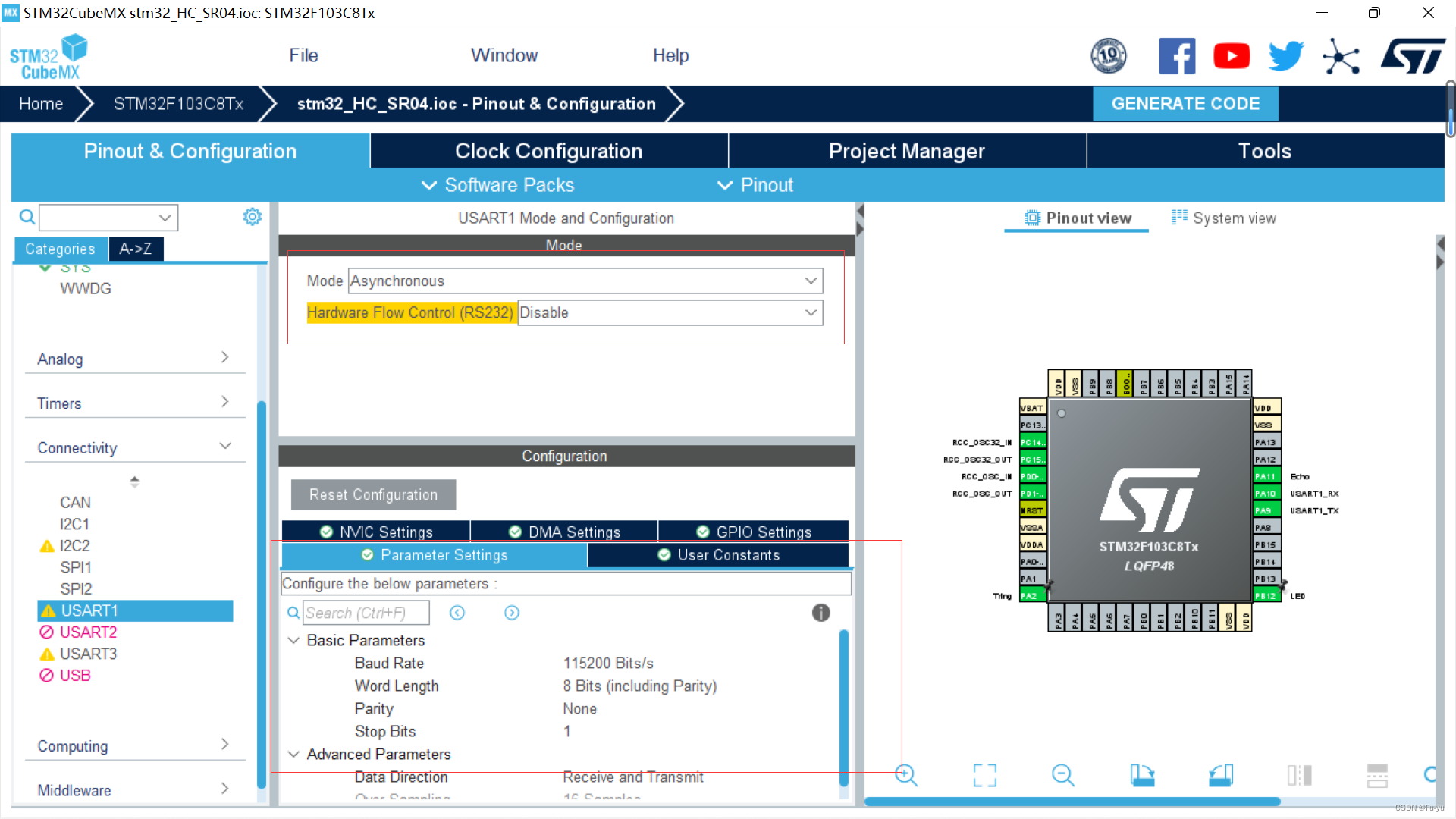
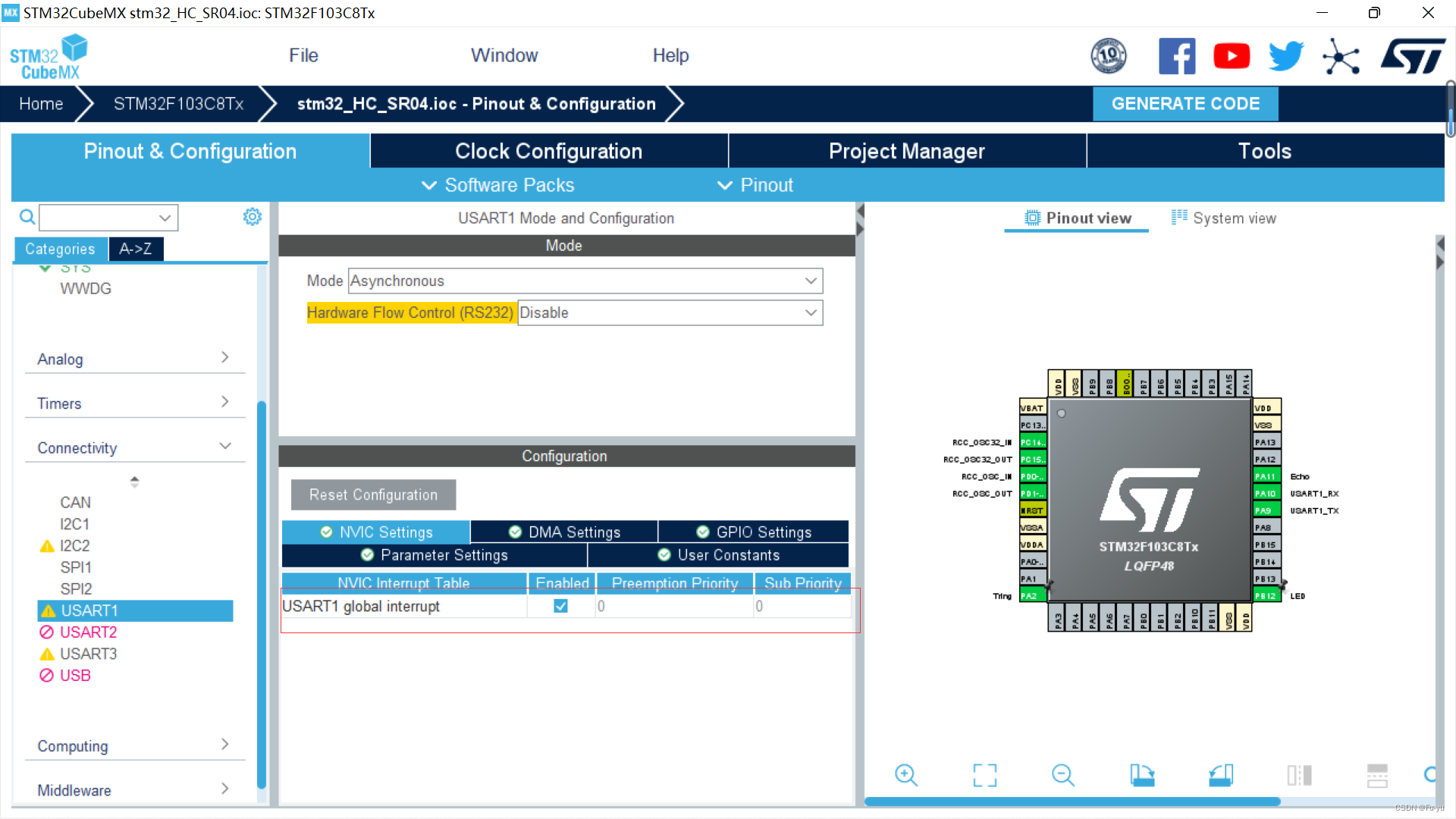
配置串口
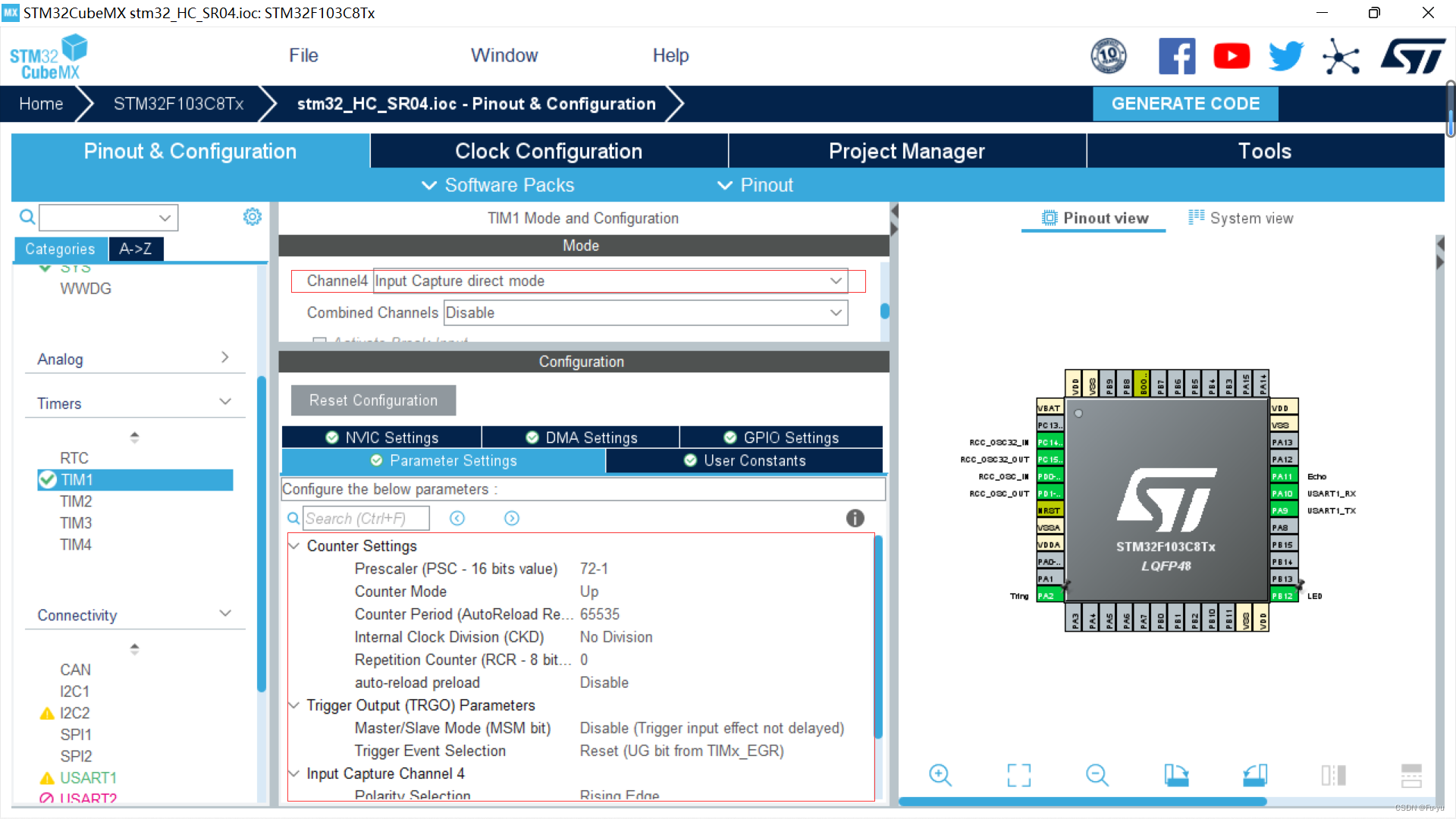
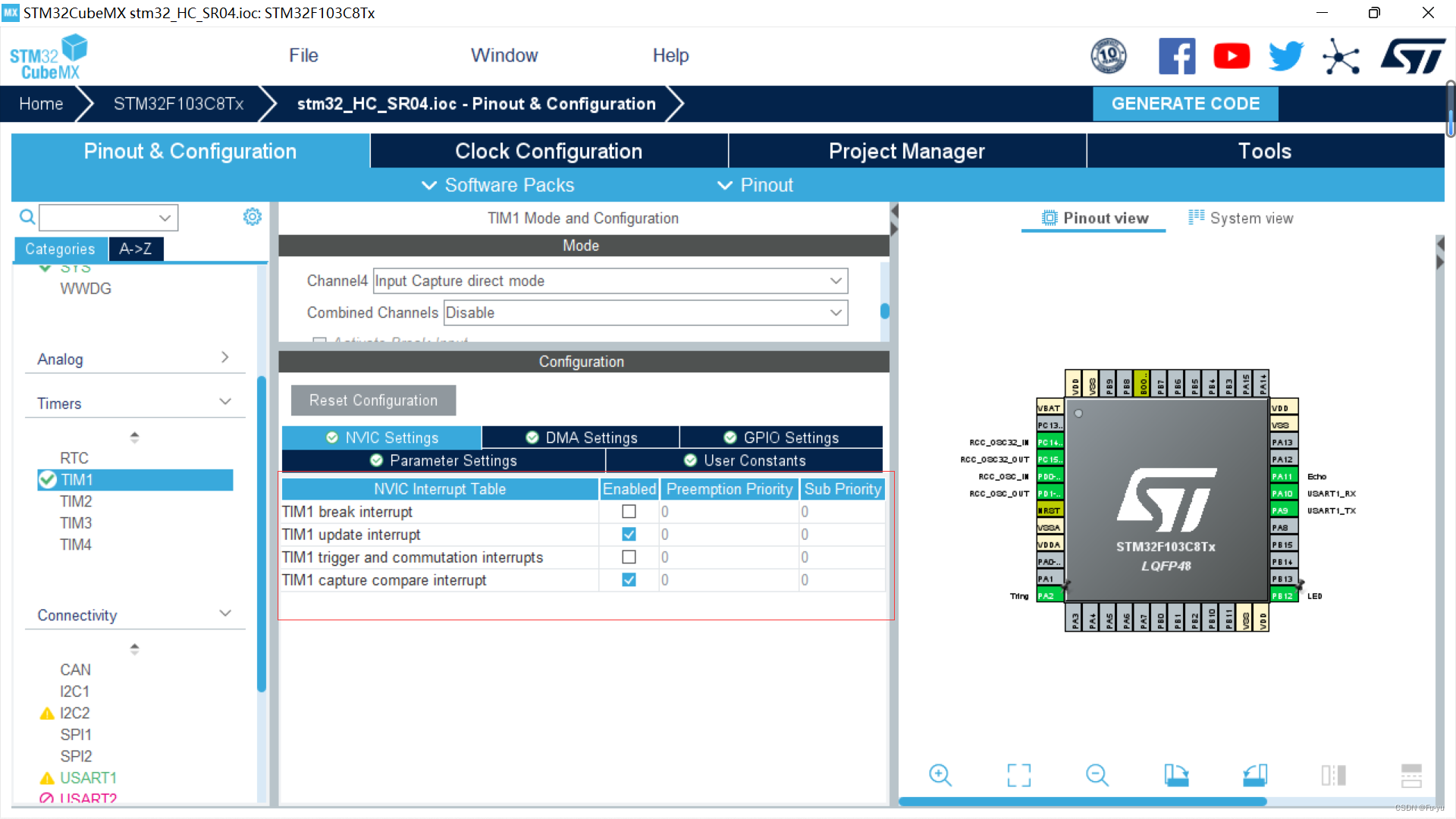
定时器配置
为了不在重复配置,这里就直接配置成输入捕获模式,开启溢出中断与捕获中断,方法一只需要开启定时器即可。利用TIM1_CH4是因为Echo与TIM1_CH4共用引脚。
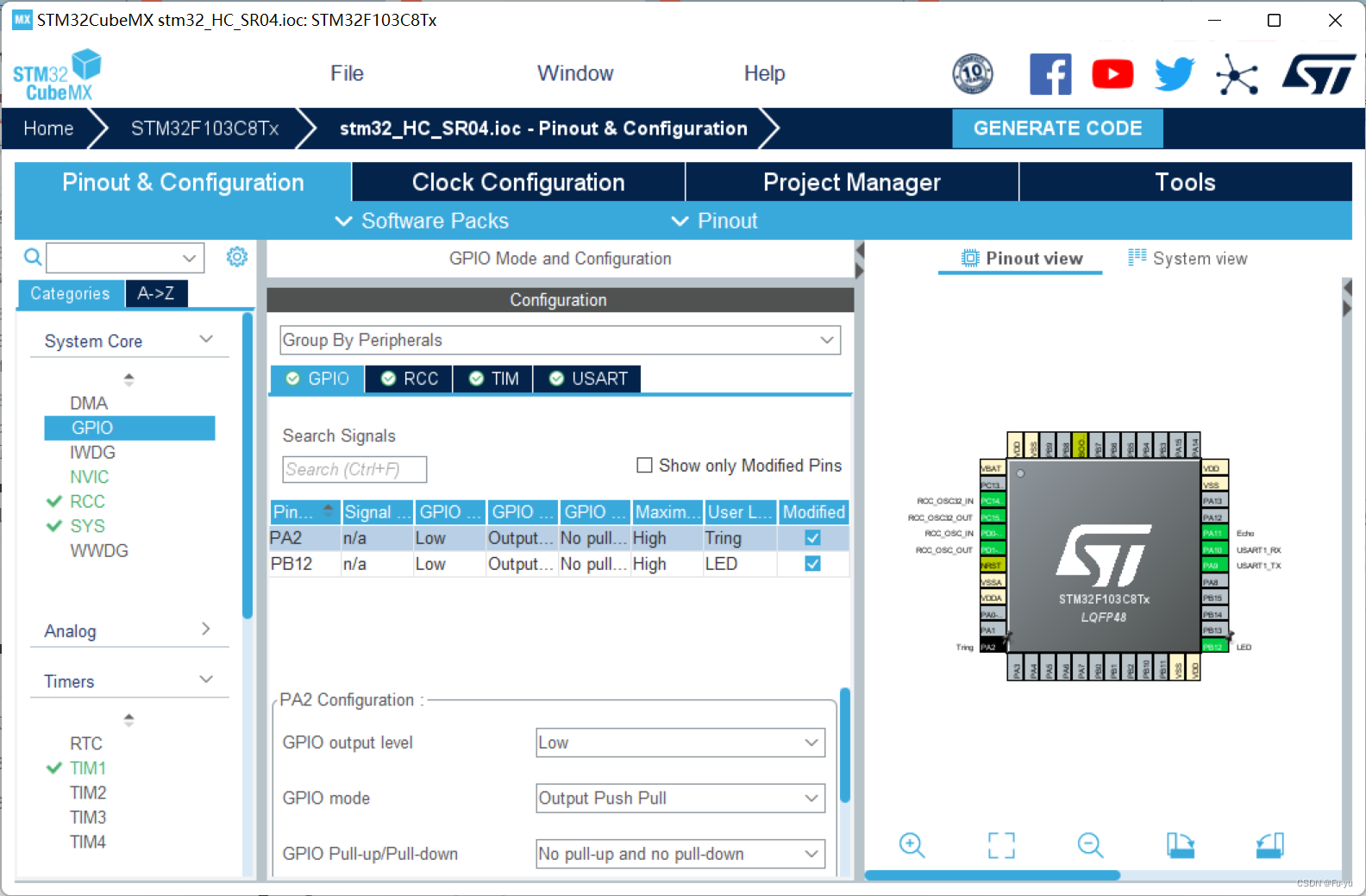
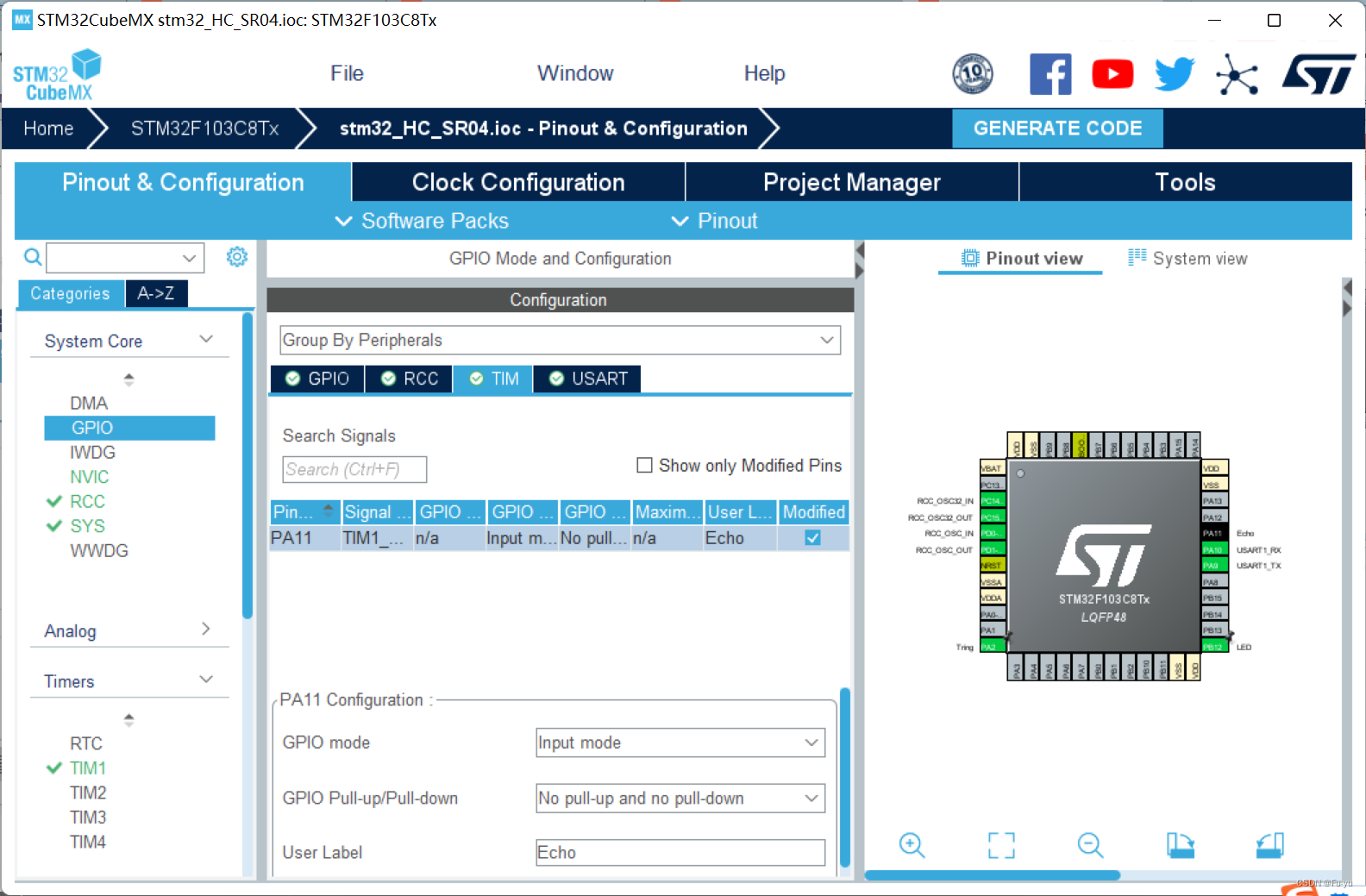
命名引脚
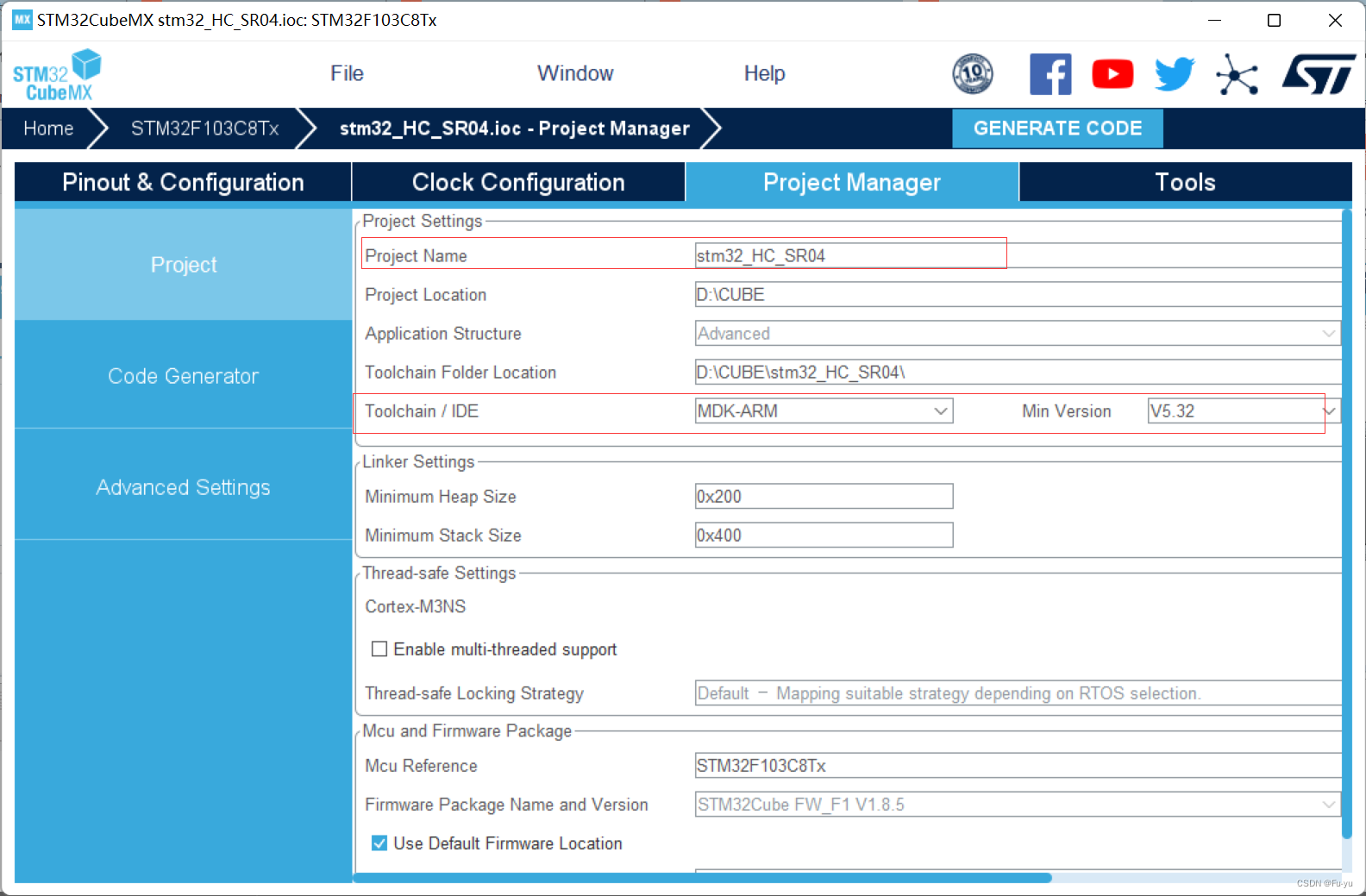
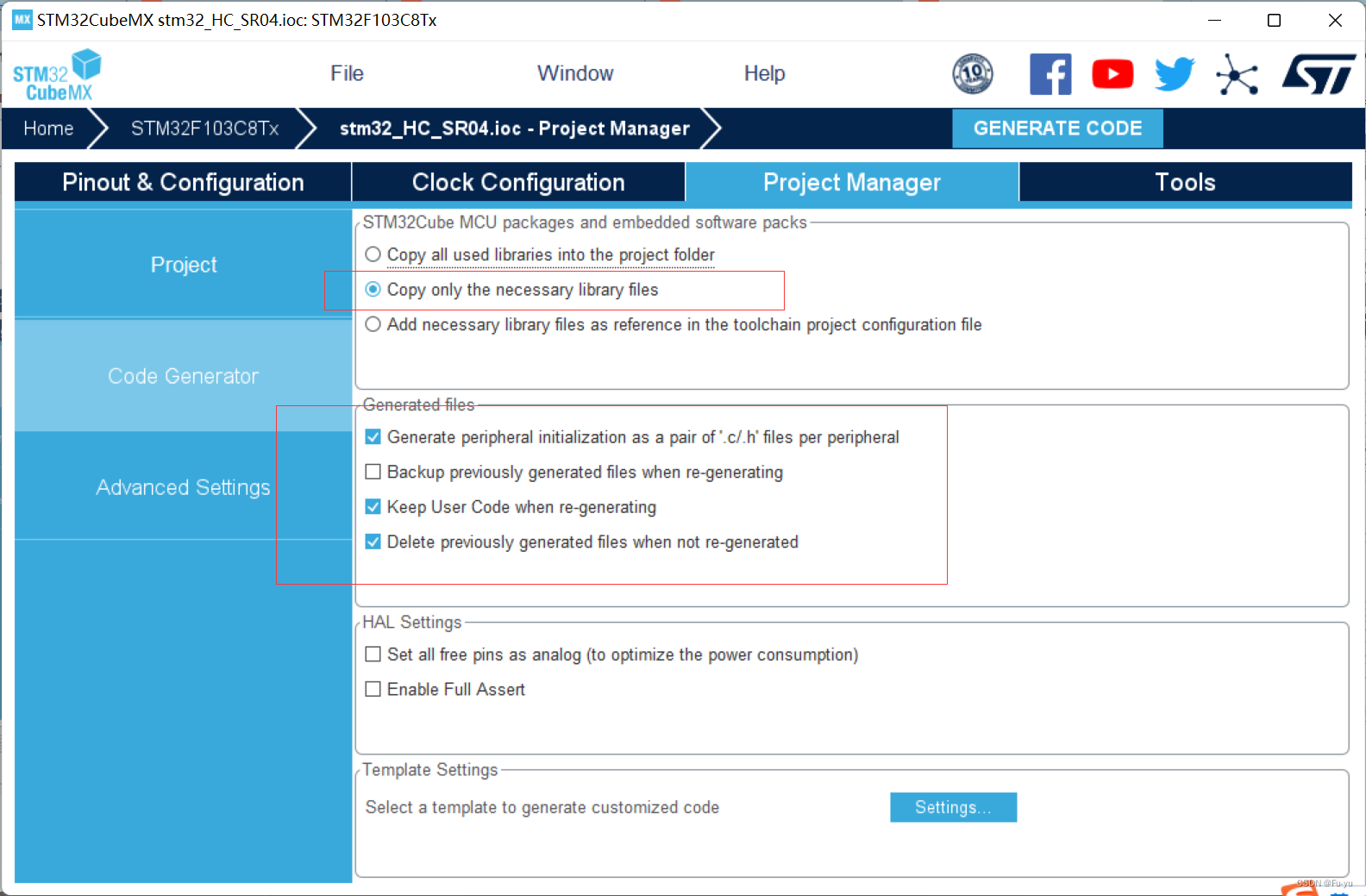
生成项目
三、keil配置代码
重定向printf函数,打开 usart.c,在 /* USER CODE BEGIN 0 / 和 / USER CODE END 0 */加入以下代码:
#include <stdio.h>
#ifdef __GNUC__
/* With GCC/RAISONANCE, small printf (option LD Linker->Libraries->Small printf
set to 'Yes') calls __io_putchar() */
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */

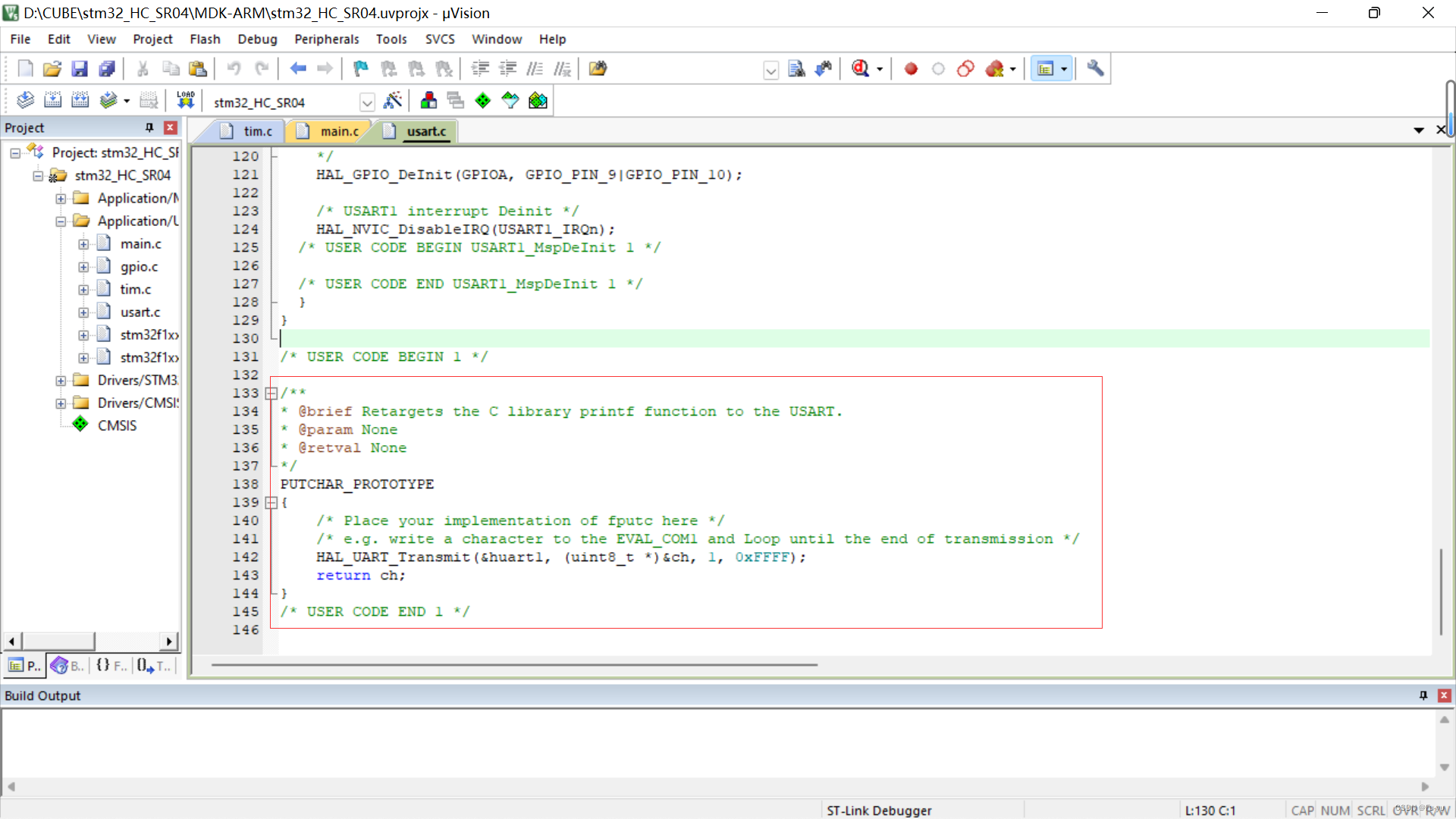
在 /* USER CODE BEGIN 1 / 和 / USER CODE END 1 */ 之间加入以下代码:
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the EVAL_COM1 and Loop until the end of transmission */
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
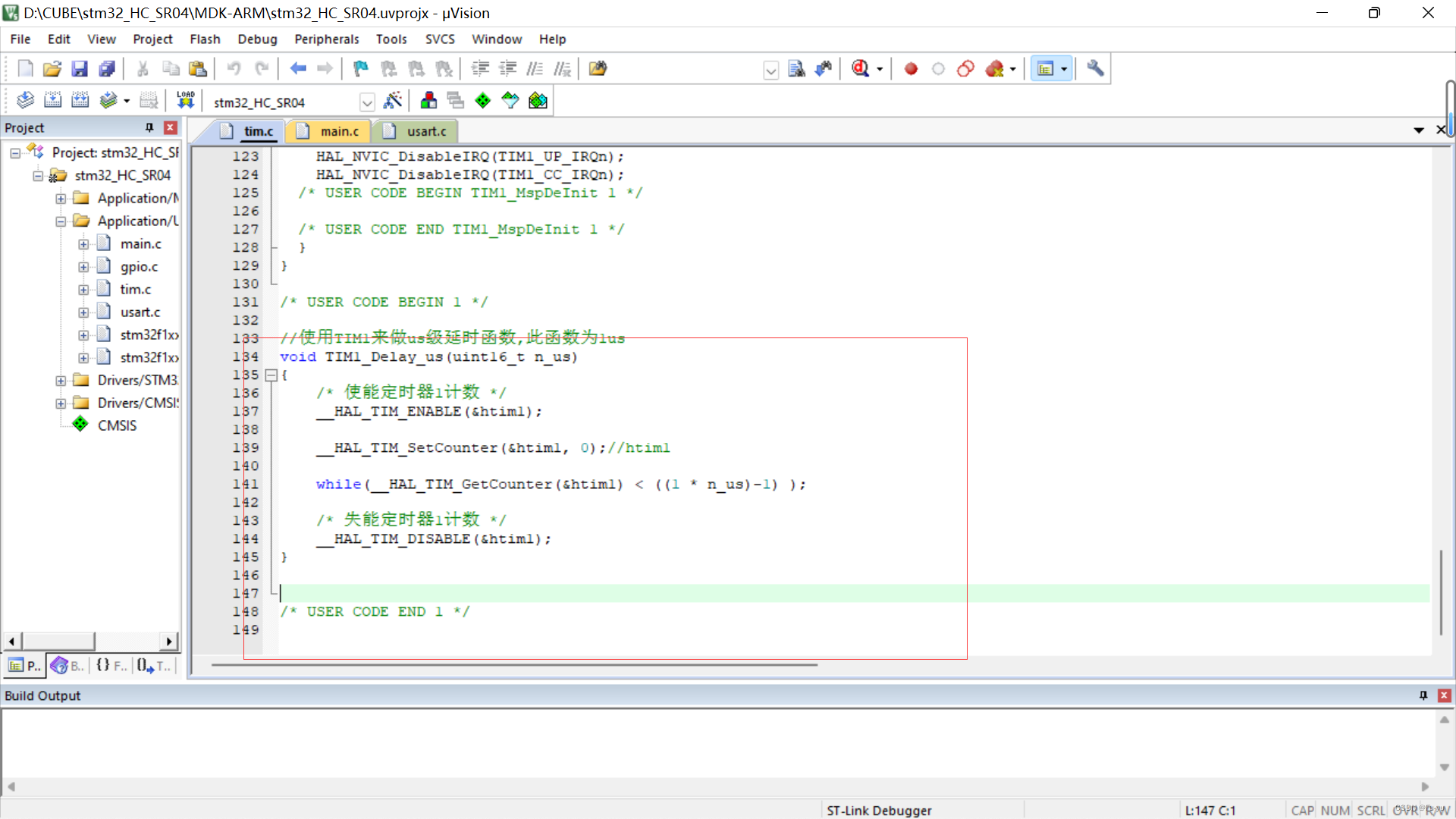
在tim.c中编写毫秒延时函数
/* USER CODE BEGIN 1 */
//使用TIM1来做us级延时函数,此函数为1us
void TIM1_Delay_us(uint16_t n_us)
{
/* 使能定时器1计数 */
__HAL_TIM_ENABLE(&htim1);
__HAL_TIM_SetCounter(&htim1, 0);//htim1
while(__HAL_TIM_GetCounter(&htim1) < ((1 * n_us)-1) );
/* 失能定时器1计数 */
__HAL_TIM_DISABLE(&htim1);
}
/* USER CODE END 1 */
在main.c中编写超声波开始函数
void Start()
{
HAL_GPIO_WritePin(Trig_GPIO_Port, Trig_Pin, GPIO_PIN_SET);//拉高
TIM1_Delay_us(20);
HAL_GPIO_WritePin(Trig_GPIO_Port, Trig_Pin, GPIO_PIN_RESET);//拉低
}
在主函数外定义变量
int Cnt;//计数值
float Distance;//距离
重写主函数
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start(&htim1);//开启定时器
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* 定时器1,通道1,模式随便,主要用于计数,没有使用边沿捕获 */
Start();//开启超声波模块
HAL_TIM_Base_Start(&htim1);//开启定时器
//对超声波输入端口操作
while( HAL_GPIO_ReadPin (Echo_GPIO_Port ,Echo_Pin) == GPIO_PIN_RESET);//等待输入电平拉高
__HAL_TIM_SetCounter(&htim1,0);
//对超声波输入端口操作
while( HAL_GPIO_ReadPin (Echo_GPIO_Port ,Echo_Pin) == GPIO_PIN_SET);//等待输入电平变低
Cnt = __HAL_TIM_GetCounter(&htim1);
HAL_TIM_Base_Stop(&htim1);
Distance = Cnt*340/2*0.000001*100 ;
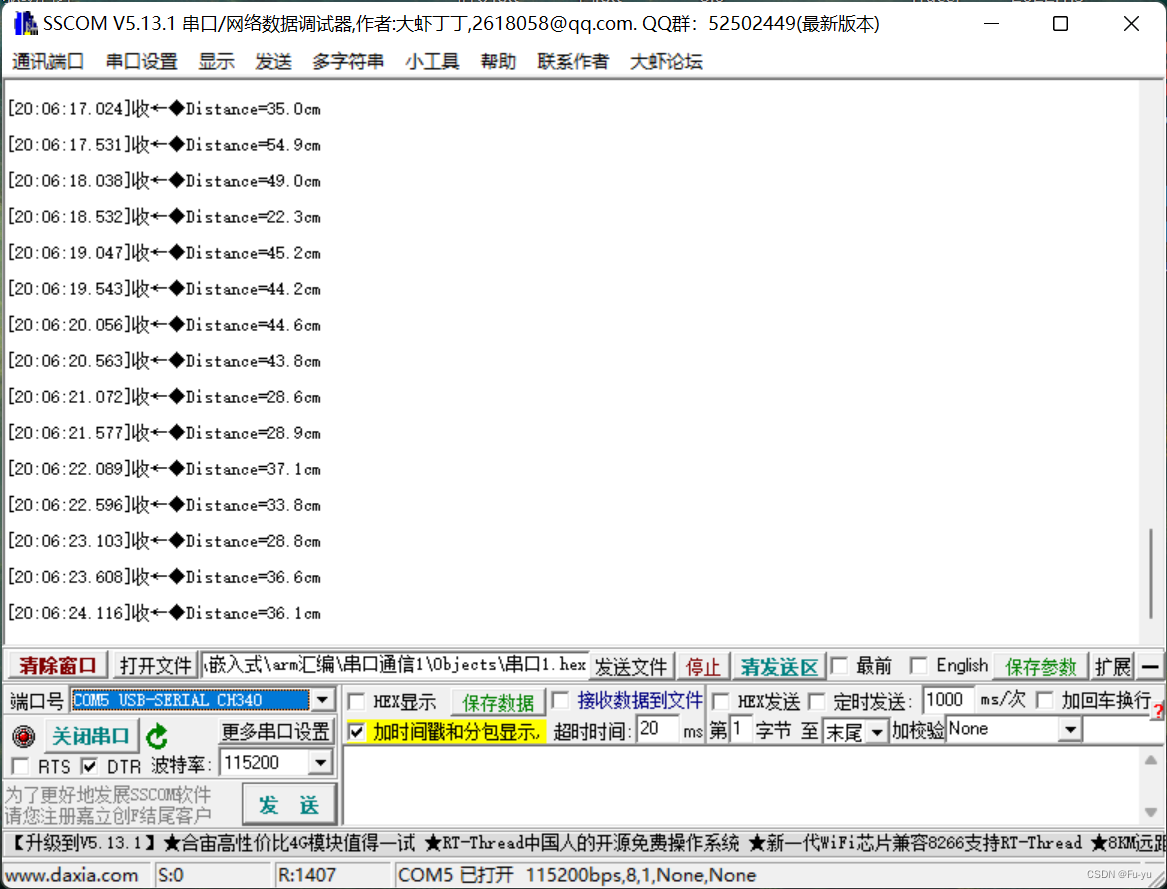
printf("Distance=%.1fcm\n",Distance);
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
硬件连接
trig——PA2;
echo——PA11;
vcc——3.3v;
GND——GND;
烧录运行结果如下: