百度Apollo开发者社区课程学习@阿鑫
百度Apollo开发者社区课程学习(1)高精地图与自动驾驶的关系
自动驾驶分类
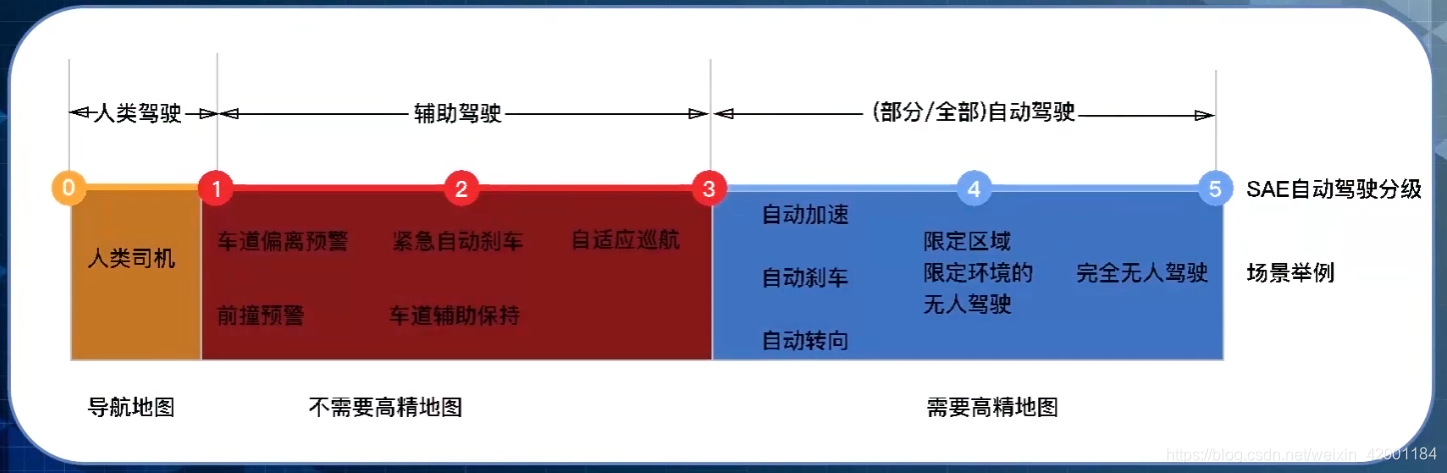
百度在做L3和L4 后者主要还是限定在规定区域内的自动驾驶 L5这种属于完全自主 目前来看 还有点遥远。
什么是高精地图
HD Map = high definition map 高分辨率地图
HAD Map = highly automated driving map 高度自动驾驶地图
高精地图最显著的特点是其表征路面特征的精准全面性
高精地图要求有更高的实时性
高精地图 ~ 自动驾驶地图
*所有的人能看到的,影响到实际驾驶操作的特征都需要表现出来。
高精地图扮演的角色

插入链接与图片
课程视频链接: bilibili课程一.
课程视频链接: bilibili课程二.
高精地图和其他传感器的协同
| 项目 | Value |
|---|---|
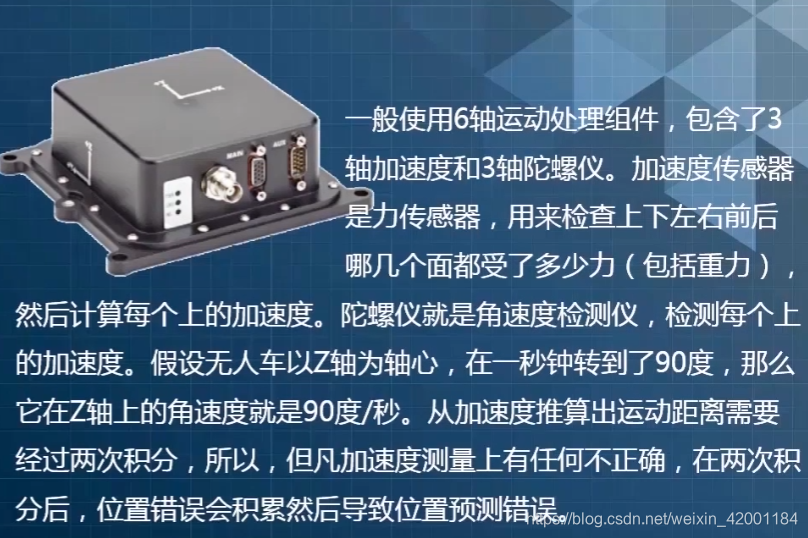
| 惯导 | 误差随着时间累积 |
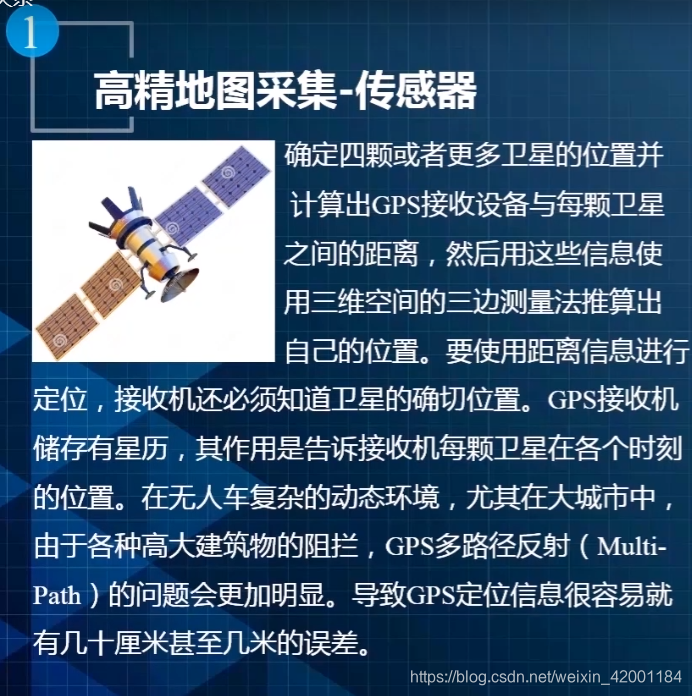
| GNSS | 太容易被干扰被阻挡 |
| Lidar | 距离有限 |
| Camera | 夜晚弱光不行 |
| Radar | 穿透性高但是精度不够 |
| 高精地图 | 可以视为一个离线预先准备好的传感器 |
路径规划和决策
-
长距离规划
- 从A点到B点一个大致路径 短距离规划(局部规划)
-
各类静态和动态的obstacles
有一个预测功能 道路上其他移动物体(道路参与者) 比如车辆或者行人的可能行走轨迹
决策模块
跟车?超车?停止?
高精地图可以给决策、预测环节提供一些先验的知识。
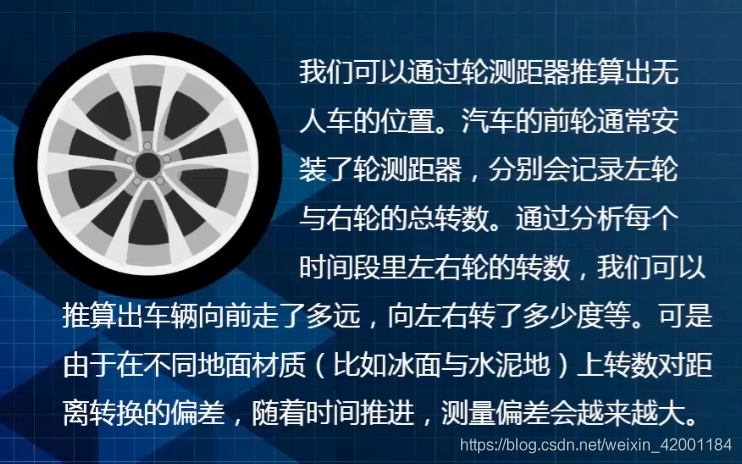
高精地图的采集与获取

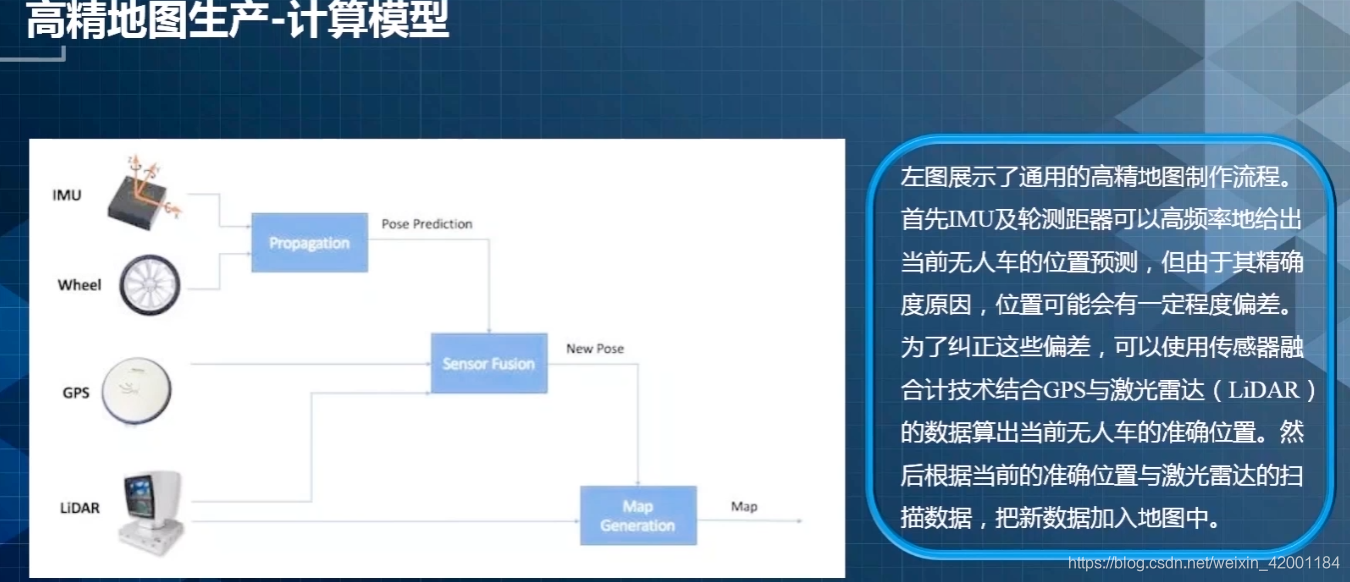
SLAM的主要目的也就是定位和实时建立地图,所以这里很多都是slam的算法。
高精地图服务:Apollo高精地图则被称为“最懂自动驾驶”的高精地图,是自动驾驶的基础,具备精细化程度最高、生产效率最高、覆盖面最广的优势。
导出与导入
导出
如果你想尝试使用此编辑器, 你可以在此篇文章任意编辑。当你完成了一篇文章的写作, 在上方工具栏找到 文章导出 ,生成一个.md文件或者.html文件进行本地保存。
导入
如果你想加载一篇你写过的.md文件,在上方工具栏可以选择导入功能进行对应扩展名的文件导入,
继续你的创作。