前言
已知Carsim的车辆中心点位于车辆的前轴中心,所输出的参数是参照前轴中心输出的(速度、位置、加速度等),在Carsim和VTD联合仿真的案例中,由于VTD车辆中心点位于车辆后轴中心,导致VTD中车辆在联仿运行时,上坡时会悬空,下坡会凹陷。仿真时大家为了解决这个问题经常会做坐标系转换,比较麻烦。
Carsim内部支持参照后轴中心输出数据的方式,就是创建一个运动传感器,将传感器安装在车辆后轴中心并输出相应的值。
一、Motion Sensors详解
1、创建Motion Sensors
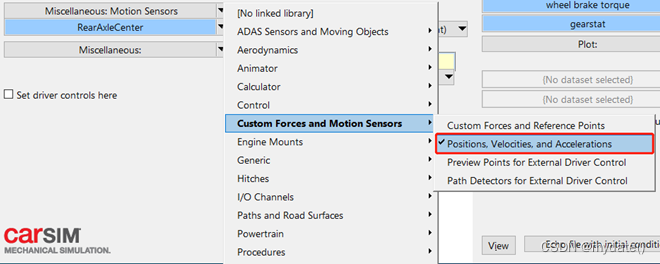
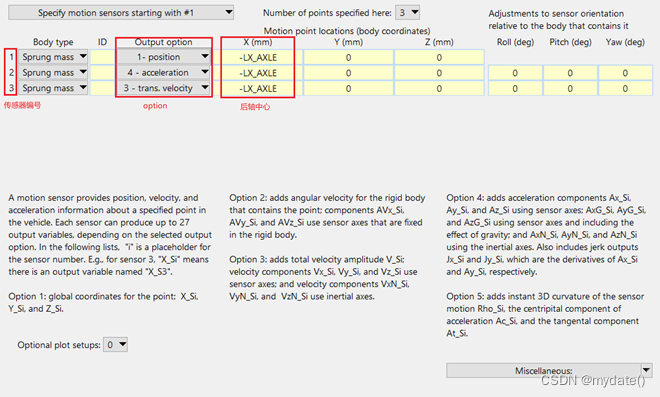
2、配置Motion Sensors参数
1)进入配置界面在X(mm) 处填写:-LX_AXLE(官方描述变量LX_AXLE为轴距, -LX_AXLE则为车辆的后轴中心,因为前轴中心做-LX_AXLE的位置偏移就移动到了车辆后轴中心)
2)下图为官方对LX_AXLE解释:

3、 生成后轴中心相关变量
1)如上图Output option示,1,4,3为option的编号;1,2,3分别为对应传感器编号:
1 – position(输出位置),sensor 1;
4 – acceleration(输出加速度),sensor 2;
3 – trans.velocity(输出速度),sensor 3;
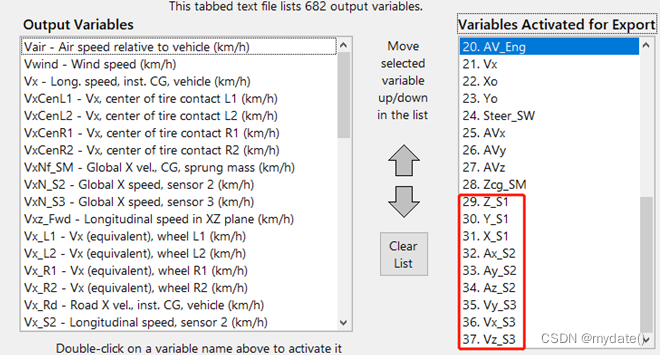
2)变量的命名与options、传感器编号关系如下图所示:
举例:
1 – position(输出位置),sensor 1;输出如下变量:
X_S1,Y_S1,Z_S1(S1就是对应的传感器编号)
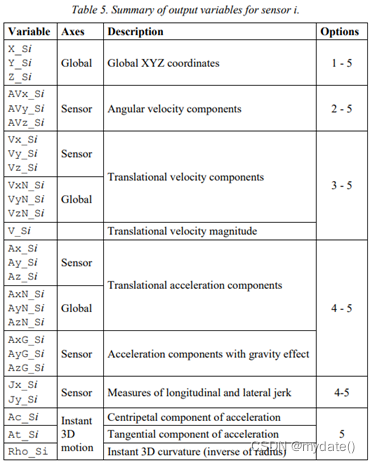
3)按照步骤1)配置会生成的变量,如下表所示:
1 – position(输出位置)输出位置变量;
4 – acceleration(输出加速度)会输出加速度、位置、速度的变量;
3 – trans.velocity(输出速度)会输出速度和位置的变量;
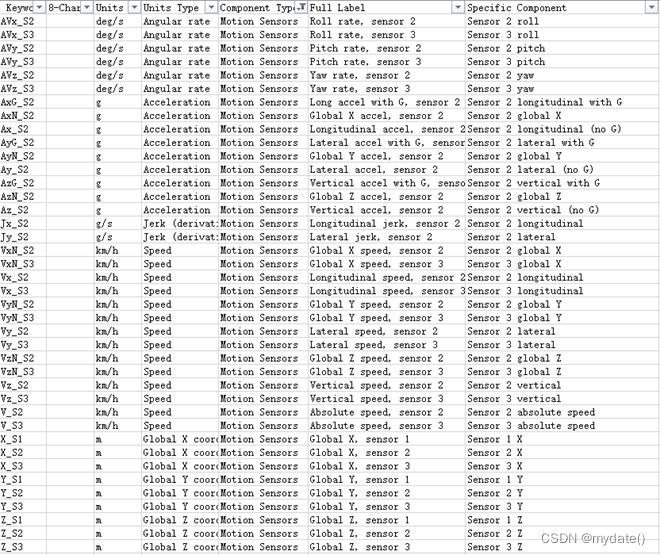
4)output选择输出变量
最后更新下Carsims的模型就可以了