Python Open3D点云配准 ICP(Iterative Closest Point)
这篇博客将介绍 迭代最近点配准算法(Iterative Closest Point, ICP) 。多年来,它一直是研究和工业中几何注册的支柱。输入是两个点云和一个初始变换,该变换大致将源点云与目标点云对齐。输出是一个精确的变换,它将两个点云紧密对齐。
- 将展示俩种ICP:点对点ICP(PointToPoint)和点对面ICP(PointToPlane)。
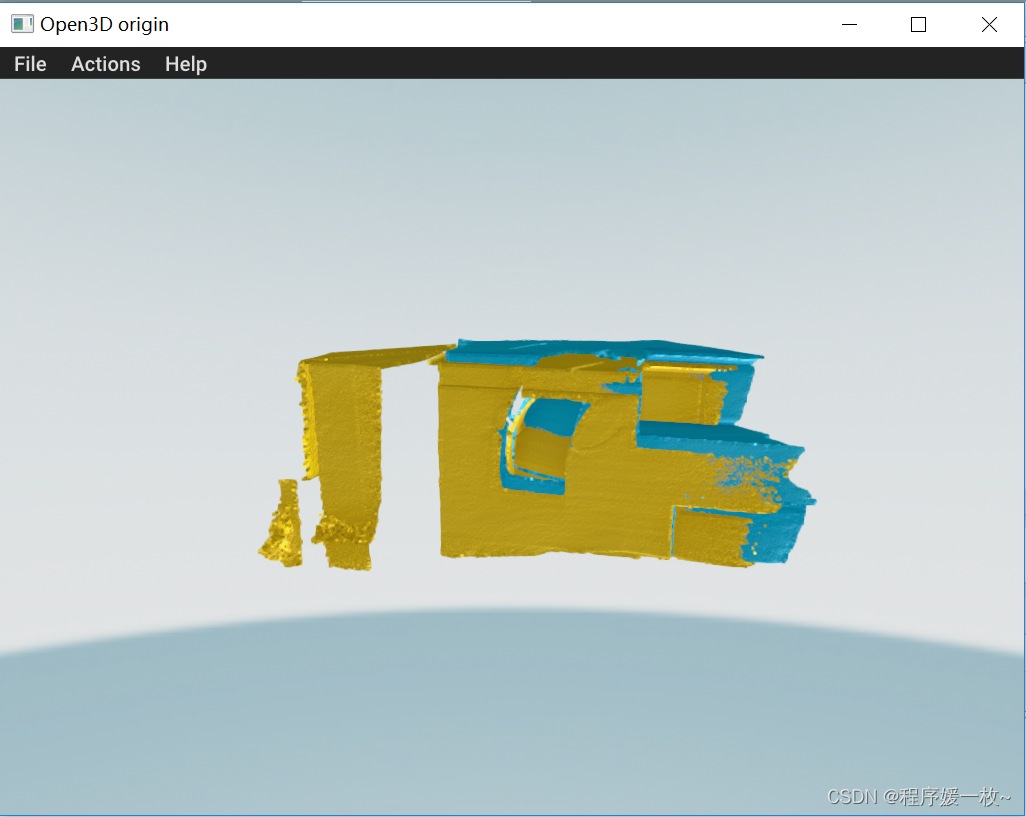
- 函数 draw_registration_result 在icp过程中可视化对齐效果。目标点云和源点云分别用青色和黄色绘制。两个点云彼此重叠得越多越紧密,对齐结果越好。
- 函数 evaluate_registration 计算两个主要指标:
- fitness:其测量重叠区域(内部对应的数量/目标中的点的数量),越高越好。
- inlier_rmse,其测量所有inlier对应的rmse相似性,越低越好。
1. 效果图
原始点云黄色 VS 原始点云青色:
初始对齐 Point to Point ICP 匹配74056个点,效果图如下:
<