测试map
上一篇训练教程mmrotate框架训练数据集,选用的iou=50,
我想测试iou在75之下的map的值,和iou在0.05-0.95递增的情况的平均map,需要进行以下操作:
测试AP75
1.修改mmrotate/datasets/dota.py
主要有一个参数:
1)iou_thr: iou阈值,修改成75
2.修改 test.py 中的参数
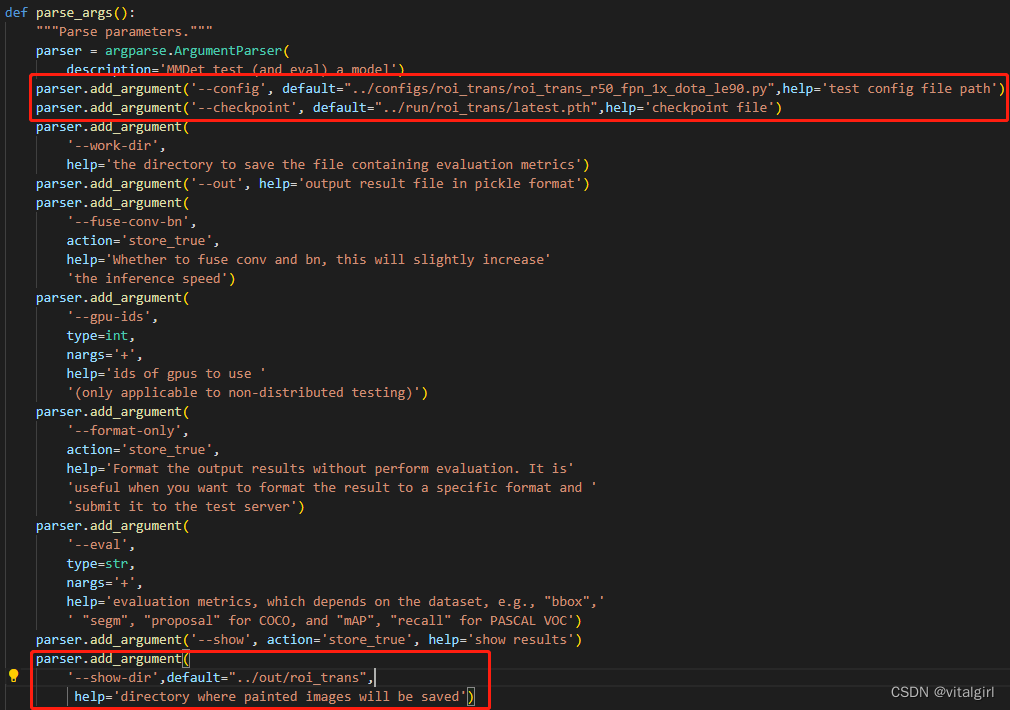
主要有三个参数:
1)config: 使用的模型文件 ;
2)checkpoint:训练得到的模型权重文件;
3)show-dir: 预测结果存放的路径
补充:测试用的数据集就是训练的步骤4中的数据集路径
3.输入指令
python test.py --eval mAP
测试AP(iou在0.05-0.95递增的情况的平均map)
需要借助其他的代码
1.修改mmrotate/datasets/dota.py
在类class DOTADataset(CustomDataset)下添加以下子函数
def save_dota_txt(self, results, outfolder,conf_thresh=0.01):
import math
if not os.path.exists(outfolder):
os.mkdir(outfolder)
for i in range(len(self)):
imgname = self.data_infos[i]['filename']
bboxresult = results[i]
txt_name = os.path.join(outfolder,imgname.split('.')[0]+'.txt')
f = open(txt_name, 'w')
for cls, bboxes in zip(self.CLASSES, bboxresult):
for box in bboxes:
if box[-1] < conf_thresh:
continue
xc, yc, w, h, ag, score = box.tolist()
wx, wy = w / 2 * math.cos(ag), w / 2 * math.sin(ag)
hx, hy = -h / 2 * math.sin(ag), h / 2 * math.cos(ag)
p1 = (xc - wx - hx, yc - wy - hy)
p2 = (xc + wx - hx, yc + wy - hy)
p3 = (xc + wx + hx, yc + wy + hy)
p4 = (xc - wx + hx, yc - wy + hy)
ps = (np.concatenate([p1, p2, p3, p4]))
points = ' '.join(ps.astype(float).astype(str))
# soft label and eval result
f.write(points + ' ' + cls + ' ' + str(box[-1]) + '\n')
# hard label
# if float(box[-1]) > 0.1:
# f.write(points + ' ' + cls + ' 0\n')
f.close()
2.借用evaluation.py,修改map步长
import numpy as np
import os
from shapely.geometry import Polygon
import sys
sys.path.append('/home/disk/bing/mmrotate-main/DOTA_devkit')
import polyiou
def parse_gt(filename):
"""
:param filename: ground truth file to parse
:return: all instances in a picture
"""
objects = []
with open(filename, 'r') as f:
while True:
line = f.readline()
if line:
splitlines = line.strip().split(' ')
object_struct = {}
if (len(splitlines) < 9):
continue
object_struct['name'] = splitlines[8]
object_struct['difficult'] = float(splitlines[9])
object_struct['bbox'] = [
float(splitlines[0]),
float(splitlines[1]),
float(splitlines[2]),
float(splitlines[3]),
float(splitlines[4]),
float(splitlines[5]),
float(splitlines[6]),
float(splitlines[7])
]
objects.append(object_struct)
else:
break
return objects
def voc_ap(rec, prec, use_07_metric=False):
""" ap = voc_ap(rec, prec, [use_07_metric])
Compute VOC AP given precision and recall.
If use_07_metric is true, uses the
VOC 07 11 point method (default:False).
"""
if use_07_metric:
# 11 point metric
ap = 0.
for t in np.arange(0., 1.1, 0.1):
if np.sum(rec >= t) == 0:
p = 0
else:
p = np.max(prec[rec >= t])
ap = ap + p / 11.
else:
# correct AP calculation
# first append sentinel values at the end
mrec = np.concatenate(([0.], rec, [1.]))
mpre = np.concatenate(([0.], prec, [0.]))
# compute the precision envelope
for i in range(mpre.size - 1, 0, -1):
mpre[i - 1] = np.maximum(mpre[i - 1], mpre[i])
# to calculate area under PR curve, look for points
# where X axis (recall) changes value
i = np.where(mrec[1:] != mrec[:-1])[0]
# and sum (\Delta recall) * prec
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1])
return ap
def parse_predict(detpath, classname):
image_ids = []
confidence = []
BB = []
files = os.listdir(detpath)
for file in files:
image_name = file.split('.')[0]
R = [
obj for obj in parse_gt(os.path.join(detpath, file))
if obj['name'] == classname
]
bbox = [x['bbox'] for x in R]
scores = [x['difficult'] for x in R]
image_names = [image_name for x in R]
image_ids += image_names
confidence += scores
BB += bbox
return np.array(image_ids), np.array(confidence), np.array(BB)
def cal_iou(g, p):
g = np.asarray(g)
p = np.asarray(p)
g = Polygon(g[:8].reshape((4, 2)))
#print('p:', p)
p = Polygon(p[:8].reshape((4, 2)))
if not g.is_valid or not p.is_valid:
return 0
inter = Polygon(g).intersection(Polygon(p)).area
union = g.area + p.area - inter
if union == 0:
return 0
else:
return inter / union
def voc_eval(
detpath,
annopath,
classname,
# cachedir,
ovthresh=0.5,
use_07_metric=False):
recs = {}
for txt in os.listdir(annopath):
recs[txt[:-4]] = parse_gt(os.path.join(annopath, txt))
class_recs = {}
npos = 0
for txt in os.listdir(annopath):
R = [obj for obj in recs[txt[:-4]] if obj['name'] == classname]
bbox = np.array([x['bbox'] for x in R])
difficult = np.array([False for x in R])
det = [False] * len(R)
npos = npos + len(R)
class_recs[txt[:-4]] = {
'bbox': bbox,
'difficult': difficult,
'det': det
}
image_ids, confidence, BB = parse_predict(detpath, classname)
sorted_ind = np.argsort(-confidence)
if BB.shape[0] == 0:
return 0, 0, 0
BB = BB[sorted_ind, :]
image_ids = [image_ids[x] for x in sorted_ind]
nd = len(image_ids)
tp = np.zeros(nd)
fp = np.zeros(nd)
for d in range(nd):
R = class_recs[image_ids[d]]
bb = BB[d, :].astype(float)
ovmax = -np.inf
BBGT = R['bbox'].astype(float)
## compute det bb with each BBGT
if BBGT.size > 0:
# overlaps = np.array([cal_iou(bb_GT, bb) for bb_GT in BBGT])
# ovmax = np.max(overlaps)
# jmax = np.argmax(overlaps)
BBGT_xmin = np.min(BBGT[:, 0::2], axis=1)
BBGT_ymin = np.min(BBGT[:, 1::2], axis=1)
BBGT_xmax = np.max(BBGT[:, 0::2], axis=1)
BBGT_ymax = np.max(BBGT[:, 1::2], axis=1)
bb_xmin = np.min(bb[0::2])
bb_ymin = np.min(bb[1::2])
bb_xmax = np.max(bb[0::2])
bb_ymax = np.max(bb[1::2])
ixmin = np.maximum(BBGT_xmin, bb_xmin)
iymin = np.maximum(BBGT_ymin, bb_ymin)
ixmax = np.minimum(BBGT_xmax, bb_xmax)
iymax = np.minimum(BBGT_ymax, bb_ymax)
iw = np.maximum(ixmax - ixmin + 1., 0.)
ih = np.maximum(iymax - iymin + 1., 0.)
inters = iw * ih
# union
uni = ((bb_xmax - bb_xmin + 1.) * (bb_ymax - bb_ymin + 1.) +
(BBGT_xmax - BBGT_xmin + 1.) *
(BBGT_ymax - BBGT_ymin + 1.) - inters)
overlaps = inters / uni
BBGT_keep_mask = overlaps > 0
BBGT_keep = BBGT[BBGT_keep_mask, :]
BBGT_keep_index = np.where(overlaps > 0)[0]
# pdb.set_trace()
def calcoverlaps(BBGT_keep, bb):
overlaps = []
for index, GT in enumerate(BBGT_keep):
overlap = polyiou.iou_poly(
polyiou.VectorDouble(BBGT_keep[index]),
polyiou.VectorDouble(bb))
overlaps.append(overlap)
return overlaps
if len(BBGT_keep) > 0:
overlaps = calcoverlaps(BBGT_keep, bb)
ovmax = np.max(overlaps)
jmax = np.argmax(overlaps)
# pdb.set_trace()
jmax = BBGT_keep_index[jmax]
if ovmax > ovthresh:
if not R['difficult'][jmax]:
if not R['det'][jmax]:
tp[d] = 1.
R['det'][jmax] = 1
else:
fp[d] = 1.
else:
fp[d] = 1.
# print('check fp:', sum(fp))
# print('check tp', sum(tp))
# print('npos num:', npos)
fp = np.cumsum(fp)
tp = np.cumsum(tp)
rec = tp / float(npos)
prec = tp / np.maximum(tp + fp, np.finfo(np.float64).eps)
ap = voc_ap(rec, prec, use_07_metric)
return rec, prec, ap
def evalution(detpath,annopath):
# predict folder
# detpath = '/home/cv123/data/zyj/ReDet_back/eval/predota_kaggle768_on_fair'
print(detpath)
print(annopath)
# # gt folder
# classes = ['plane', 'baseball-diamond', 'bridge', 'ground-track-field',
# 'small-vehicle', 'large-vehicle', 'ship', 'tennis-court',
# 'basketball-court', 'storage-tank', 'soccer-ball-field',
# 'roundabout', 'harbor', 'swimming-pool', 'helicopter']
classes = ['ship',]
ap_50 = 0
ap_75 = 0
map = 0
for cls in classes:
aps = []
for iou_thr in [0.5, 0.55, 0.6, 0.65, 0.7, 0.75, 0.8, 0.85, 0.9, 0.95]:
rec, prec, ap = voc_eval(
detpath, annopath, cls, ovthresh=iou_thr, use_07_metric=True)
aps.append(ap * 100)
ap_50 += aps[0]
ap_75 += aps[5]
map += np.array(aps).mean()
print(cls, ' ', 'AP50: {:.2f}\tAP75: {:.2f}'.format(aps[0], aps[5]))
print('AP50: {:.2f}\tAP75: {:.2f}\t mAP: {:.2f}'.format(
ap_50 / len(classes), ap_75 / len(classes), map / len(classes)))
主要有两个参数:
1)sys.path.append(‘/home/disk/bing/mmrotate-main/DOTA_devkit’)
需要借用DOTA_devkit,一般将evaluation.py放在DOTA_devkit文件夹的同级目录下
2)classes = [‘ship’,]
3.修改DOTA_devkit/ResultMerge_multi_process.py

修改sys.path.append(‘/home/disk/bing/mmrotate-main/DOTA_devkit’)路径
4.借用test.py
import argparse
import os
import os.path as osp
import time
import warnings
import mmcv
import torch
from mmcv import Config, DictAction
from mmcv.cnn import fuse_conv_bn
from mmcv.parallel import MMDataParallel, MMDistributedDataParallel
from mmcv.runner import (get_dist_info, init_dist, load_checkpoint,
wrap_fp16_model)
from mmdet.apis import multi_gpu_test, single_gpu_test
from mmdet.datasets import build_dataloader, replace_ImageToTensor
from mmrotate.datasets import build_dataset
from mmrotate.models import build_detector
from mmrotate.utils import setup_multi_processes, compat_cfg
from DOTA_devkit.ResultMerge_multi_process import mergebypoly2
from evaluation import evalution
def forward(config_path,checkpointpath,test_img_path,outpath,imgsize,batchsize):
cfg = Config.fromfile(config_path)
cfg = compat_cfg(cfg)
# set multi-process settings
setup_multi_processes(cfg)
cfg.model.pretrained = None
if cfg.model.get('neck'):
if isinstance(cfg.model.neck, list):
for neck_cfg in cfg.model.neck:
if neck_cfg.get('rfp_backbone'):
if neck_cfg.rfp_backbone.get('pretrained'):
neck_cfg.rfp_backbone.pretrained = None
elif cfg.model.neck.get('rfp_backbone'):
if cfg.model.neck.rfp_backbone.get('pretrained'):
cfg.model.neck.rfp_backbone.pretrained = None
samples_per_gpu = batchsize
distributed = False
test_dict=dict(
type='DOTADataset',
test_mode = True,
img_prefix=test_img_path,
ann_file=test_img_path,
pipeline=[
dict(type='LoadImageFromFile'),
dict(
type='MultiScaleFlipAug',
img_scale=(imgsize, imgsize),
flip=False,
transforms=[
dict(type='RResize'),
dict(
type='Normalize',
mean=[123.675, 116.28, 103.53],
std=[58.395, 57.12, 57.375],
to_rgb=True),
dict(type='Pad', size_divisor=32),
dict(type='DefaultFormatBundle'),
dict(type='Collect', keys=['img'])
])
],
version='le90')
dataset = build_dataset(test_dict)
data_loader = build_dataloader(
dataset,
samples_per_gpu=samples_per_gpu,
workers_per_gpu=min(20, samples_per_gpu),
dist=distributed,
shuffle=False)
# build the model and load checkpoint
cfg.model.train_cfg = None
model = build_detector(cfg.model, test_cfg=cfg.get('test_cfg'))
fp16_cfg = cfg.get('fp16', None)
if fp16_cfg is not None:
wrap_fp16_model(model)
checkpoint = load_checkpoint(model, checkpointpath, map_location='cpu')
if 'CLASSES' in checkpoint.get('meta', {}):
model.CLASSES = checkpoint['meta']['CLASSES']
else:
model.CLASSES = dataset.CLASSES
if not distributed:
model = MMDataParallel(model, device_ids=range(1))
outputs = single_gpu_test(model, data_loader)
dataset.save_dota_txt(outputs,outfolder=outpath)
if __name__ == '__main__':
#cfg and checkpoint
config_path = "/home/disk/bing/mmrotate-main/configs/oriented_reppoints/oriented_reppoints_r50_fpn_1x_dota_le135.py"
checkpointpath = "/home/disk/bing/mmrotate-main/run/oriented_reppoints/epoch_12.pth"
#test
annopath = "/home/disk/bing/datasets/dota/val/labels"
test_img_path = "/home/disk/bing/datasets/dota/val/images"
#output txt folder
outpath = "/home/disk/bing/datasets/dota/val/oriented_reppoints_epoch12_test"
img_size = 1024
batchsize = 2
#forward
forward(config_path,checkpointpath,test_img_path,outpath,img_size,batchsize)
dst_folder = outpath
evalution(dst_folder, annopath)
主要有五个参数:
1)config_path
2)checkpointpath
3)annopath
4)test_img_path
5)outpath
一般将test.py放在evaluation.py的同级目录下
5.输入指令
python test.py