铰链关节是一种模拟物理系统中的连接方式,它允许两个物体围绕一个共同的轴点旋转。这种连接方式可以用于模拟门、摆钟、机器人手臂等各种物理运动。
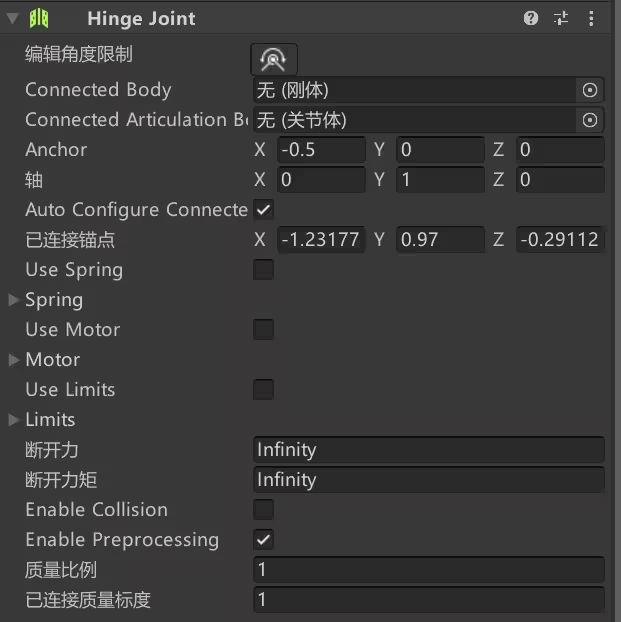
Connected Body(连接体):这是铰链关节连接的另一个刚体。通过设置这个属性,您可以指定与当前物体连接的其他物体。
Anchor(锚点):锚点是与铰链关节连接的刚体上的一个点。它定义了相对于刚体的本地空间中的位置。铰链关节的旋转轴将通过锚点传递。
Axis(旋转轴):旋转轴定义了围绕其进行旋转的方向。它是一个三维向量,通常是世界空间中的单位向量。通过设置旋转轴,您可以控制铰链关节的旋转方向。
Use Limits(使用限制):该属性确定是否启用关节的限制。如果启用,您可以设置最小角度和最大角度来限制铰链关节的旋转范围。
Limits(限制):当启用限制时,您可以设置铰链关节的旋转范围。最小角度和最大角度定义了铰链关节允许旋转的角度范围。
Use Motor(使用电机):铰链关节可以使用电机来施加旋转力。该属性确定是否启用电机。
Motor(电机):如果启用电机,您可以设置旋转速度和旋转力。旋转速度定义了铰链关节旋转的目标速度,而旋转力定义了施加在关节上的力的大小。
Use Spring(使用弹簧):您可以使用弹簧属性来模拟铰链关节的弹性。通过启用此属性,您可以设置弹簧的刚度和阻尼。
Spring(弹簧):如果启用弹簧,您可以设置弹簧的刚度和阻尼。刚度定义了弹簧的硬度,而阻尼定义了弹簧的阻尼比例。
通过设置和调整这些参数,您可以根据需要控制铰链关节的行为。这些参数允许您限制旋转范围、施加力和模拟弹性等效果。理解这些参数的作用可以帮助您更好地使用Unity中的铰链关节实现所需的物理效果。