在建立规划模型时,若目标函数中决策变量或者约束方程(不等式)中某些变量为非一次(不是线性),则称建立的数学模型为非线性规划模型。

上述模型为非线性规划的标准模型(目标最小化,所有约束都是大于等于),很多优化理论的推导和优化程序的编译都是按照这种模式展开。
可行解
若x1,x2满足上述条件[10],[11],[12],则称向量x=[x1,x2]T为上述非线规划的可行解。
例如:
 其中x(1),x(4)不是此问题的可行解,而x(2),x(3)是可行解。
其中x(1),x(4)不是此问题的可行解,而x(2),x(3)是可行解。
可行集(可行域)
 称为非线性规划问题[5]的可行集(域)。
称为非线性规划问题[5]的可行集(域)。
举例

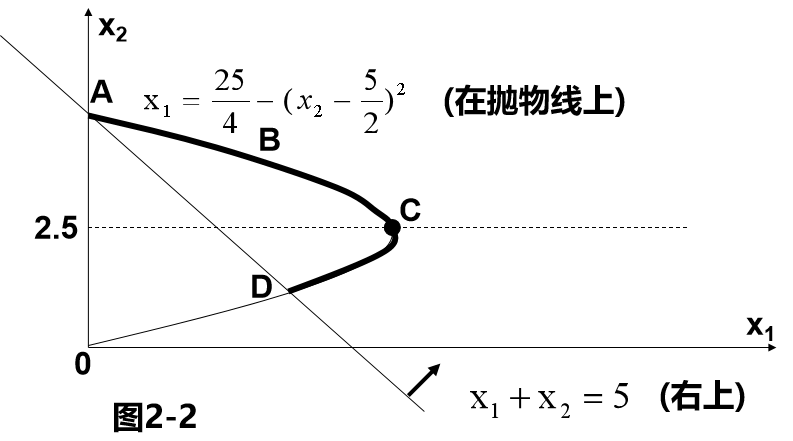
【问题分析】
决策变量为x=(x1,x2)T。目标函数表示决策变量x=(x1,x2)T到点(2,1)T的距离的平方(体现为以(2,1)为圆心的圆周半径变化);
第一个约束是一条抛物线(开口朝左,x1为横轴) (注意等号)
(注意等号)
第二个约束为一次不等式;同时决策变量非负。
解
1、画出图形
绘制约束曲线,标出可行域
2、绘制目标函数曲线
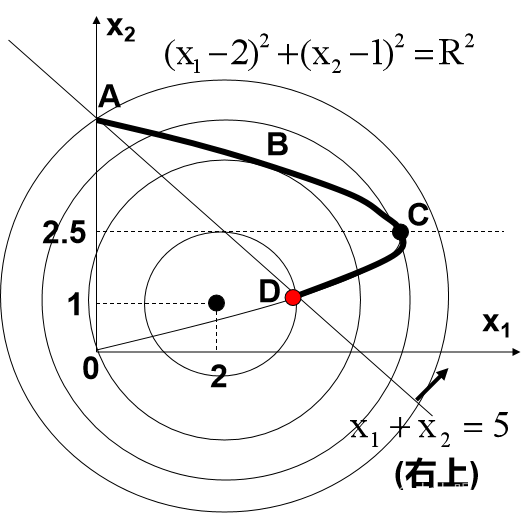
该问题的目标是在抛物线段ABCD上找一个点,使得这个点到(2,1)T的距离的平方最小(距离本身也是最小)。这样的点位于以(2,1)T为圆心的圆周上。由图示可知,点D到(2,1)T的距离最小。即D(4,1)T就是抛物线段ABCD上到点(2,1)T距离平方最小的点。
因为抛物线段ABCD上,B 左右的点到(2,1)T的距离都大于B到(2,1)T的距离;C左右的点到(2,1)T的距离都小于C到(2,1)T的距离,因此f(B)为局部极小值,f( C )称为局部极大值。相应地,f(D)称为全局最小值,f(A)称为全局最大值