一、概述
点云是表示 3D 坐标系中的数字 3D 物理对象或空间的点数据库。它由数百万或者更多个单独的测量点组成,具有 x、y 和 z 坐标。3D点云是物体的高精度数字记录。点云用于生成用于 3D 建模的 3D 网格和其他模型。包括医学成像、3D 打印、制造、建筑、3D 游戏和虚拟现实 (VR) 应用在内的各种工程和医疗领域广泛使用 3D 点云。
3D 机器视觉以适合计算机或 PAC/PLC 处理的格式捕获对象的位置和形状。对象的表面由三维坐标列表(X、Y、Z)表示,称为“点云”。
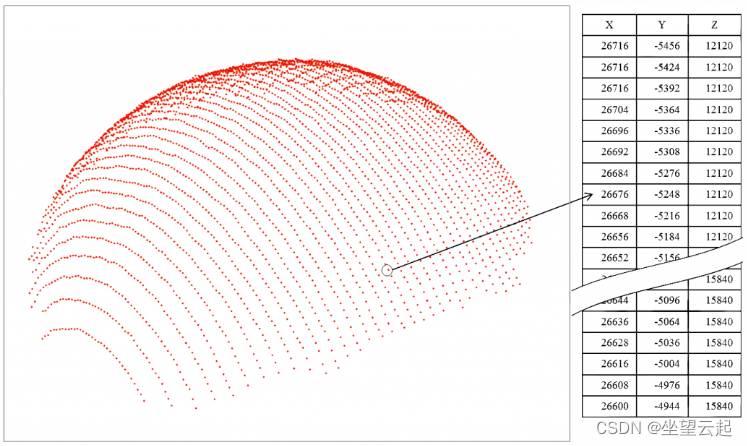
根据所使用的传感器和捕获云的方法,每个点还可以包括RGB颜色数据或强度信息。这些数据反映了产生该点的激光脉冲的返回强度。请注意,每个 3D 点云中的点始终位于可见对象的外表面上。来自扫描仪的光线从物体反射以产生这些斑点。
激光扫描形成3D点云
点云中的点越密集,捕获更小细节的对象表示就越详细。将这些点云数据转换为 3D 模型的过程称为点云处理。创建点云所需的时间取决于所需扫描的次数和扫描的密度。与高级扫描仪相比,普通移动扫描仪所需的时间要少得多。
点云的生成
点云通常使用以下两种工具中的