一、简介
在halcon 和PCL 中拟合同一片点云的差距有多大,和设置的参数有管,但是我这里尽量设置的差不多
Matlab 最小二乘法 拟合平面 (PCL PCA拟合平面)_matlab平面拟合_Σίσυφος1900的博客-CSDN博客
Halcon 用点来拟合平面_fit_primitives_object_model_3d_Σίσυφος1900的博客-CSDN博客
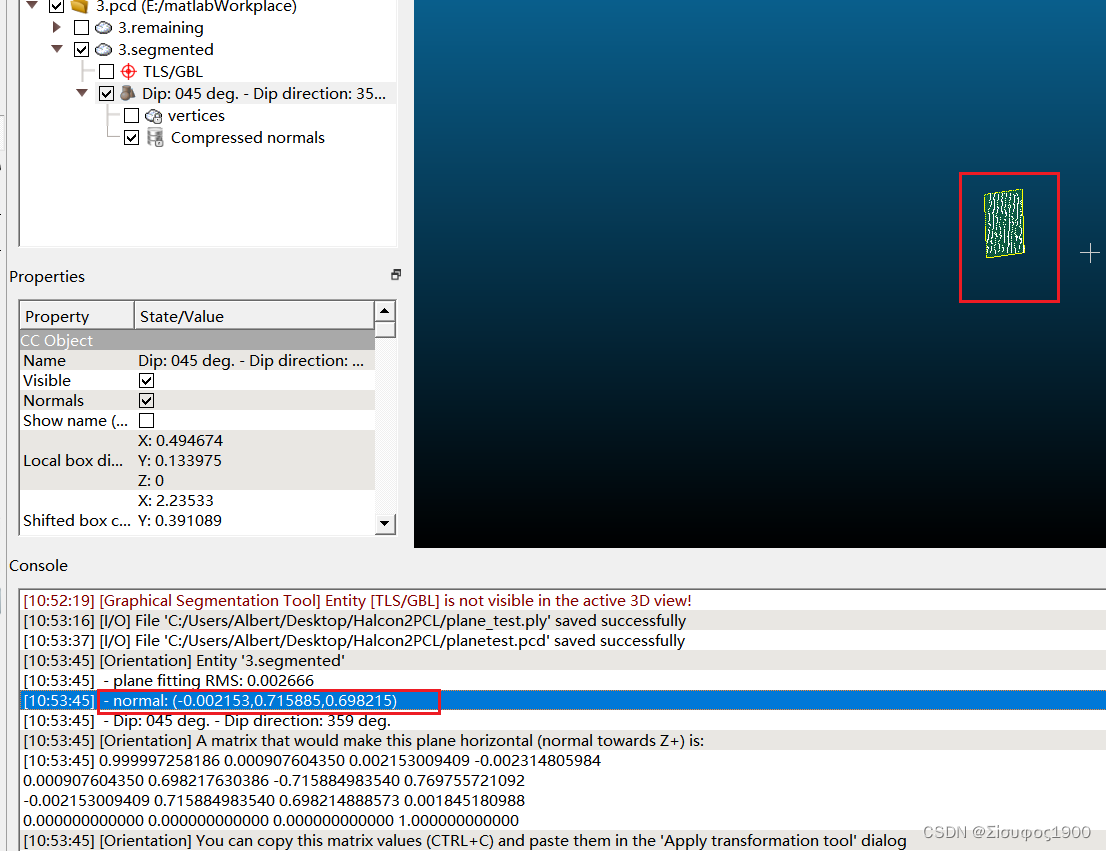
这个是原始点云,并且在cc 中做的测试:
二、Halcon
* 点云拟合平面
read_object_model_3d ('C:/Users/Albert/Desktop/Halcon2PCL/plane_test.ply', 'm', [], [], ObjectModel3D, Status1)
fit_primitives_object_model_3d (ObjectModel3D, ['primitive_type','fitting_algorithm'], ['plane','least_squares_tukey'], ObjectModel3DOut)
get_object_model_3d_params (ObjectModel3DOut, 'primitive_parameter', Normals)

三、PCL
pcl 中这里列出了两中方法
1、PCA
2、RANSAC
// 拟合平面
int FitPlaneByPCA(pcl::PointCloud<pcl::PointXYZ>::Ptr in, CG_Plane & plane)
{
if (in->size()<3)
{
return -1;
}
pcl::PCA<pcl::PointXYZ> pca;
pca.setInputCloud(in);
Eigen::Matrix3f ve = pca.getEigenVectors();
cout << "矩阵:" << endl;
cout << ve << endl;
plane.A = ve.col(2).row(0).value();
plane.B = ve.col(2).row(1).value();
plane.C = ve.col(2).row(2).value();
//cout << "平面参数: " << endl;
//cout << " A:" << A << endl;
//cout << " B:" << B << endl;
//cout << " C:" << C << endl;
//计算点云的质心
Eigen::Vector4d centroid;
pcl::compute3DCentroid(*in, centroid);
plane.D = -(plane.A * centroid[0] + plane.B * centroid[1] + plane.C * centroid[2]);
}
int FitPlaneByRANSAC(pcl::PointCloud<pcl::PointXYZ>::Ptr in, float distance, int Maxnumber, CG_Plane & plane)
{
if (in->size()<3)
{
return -1;
}
//创建一个模型参数对象,用于记录结果
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
//inliers表示误差能容忍的点,记录点云序号
pcl::PointIndices::Ptr inliers(new pcl::PointIndices);
//创建一个分割器
pcl::SACSegmentation<pcl::PointXYZ> seg;
//Optional,设置结果平面展示的点是分割掉的点还是分割剩下的点
seg.setOptimizeCoefficients(true);
//Mandatory-设置目标几何形状
seg.setModelType(pcl::SACMODEL_PLANE);
//分割方法:随机采样法
seg.setMethodType(pcl::SAC_RANSAC);
//设置误差容忍范围,也就是阈值
seg.setDistanceThreshold(distance);
// 设置最大迭代次数
seg.setMaxIterations(Maxnumber);
//输入点云
seg.setInputCloud(in);
//分割点云
seg.segment(*inliers, *coefficients);
plane.A = coefficients->values[0];
plane.B = coefficients->values[1];
plane.C = coefficients->values[2];
plane.D = coefficients->values[3];
}

四、法向量的计算
Halcon 表面法向量 pcl_Σίσυφος1900的博客-CSDN博客
pcl::PointCloud<pcl::Normal>::Ptr normal_cloud(new pcl::PointCloud<pcl::Normal>);
// 计算法向量
pcl::search::KdTree<pcl::PointXYZ> ::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
pcl::NormalEstimationOMP<pcl::PointXYZ, pcl::Normal> normalomp;
normalomp.setInputCloud(cloud_src);
normalomp.setNumberOfThreads(10); // 设置加速线程书
normalomp.setSearchMethod(tree);
normalomp.setRadiusSearch(distance);
normalomp.compute(*normal_cloud);* 点云拟合平面
read_object_model_3d ('C:/Users/Albert/Desktop/Halcon2PCL/plane_test.ply', 'm', [], [], newObjectModel3D, Status1)
fit_primitives_object_model_3d (newObjectModel3D, ['primitive_type','fitting_algorithm'], ['plane','least_squares_tukey'], ObjectModel3DOut)
get_object_model_3d_params (ObjectModel3DOut, 'primitive_parameter', Normals)
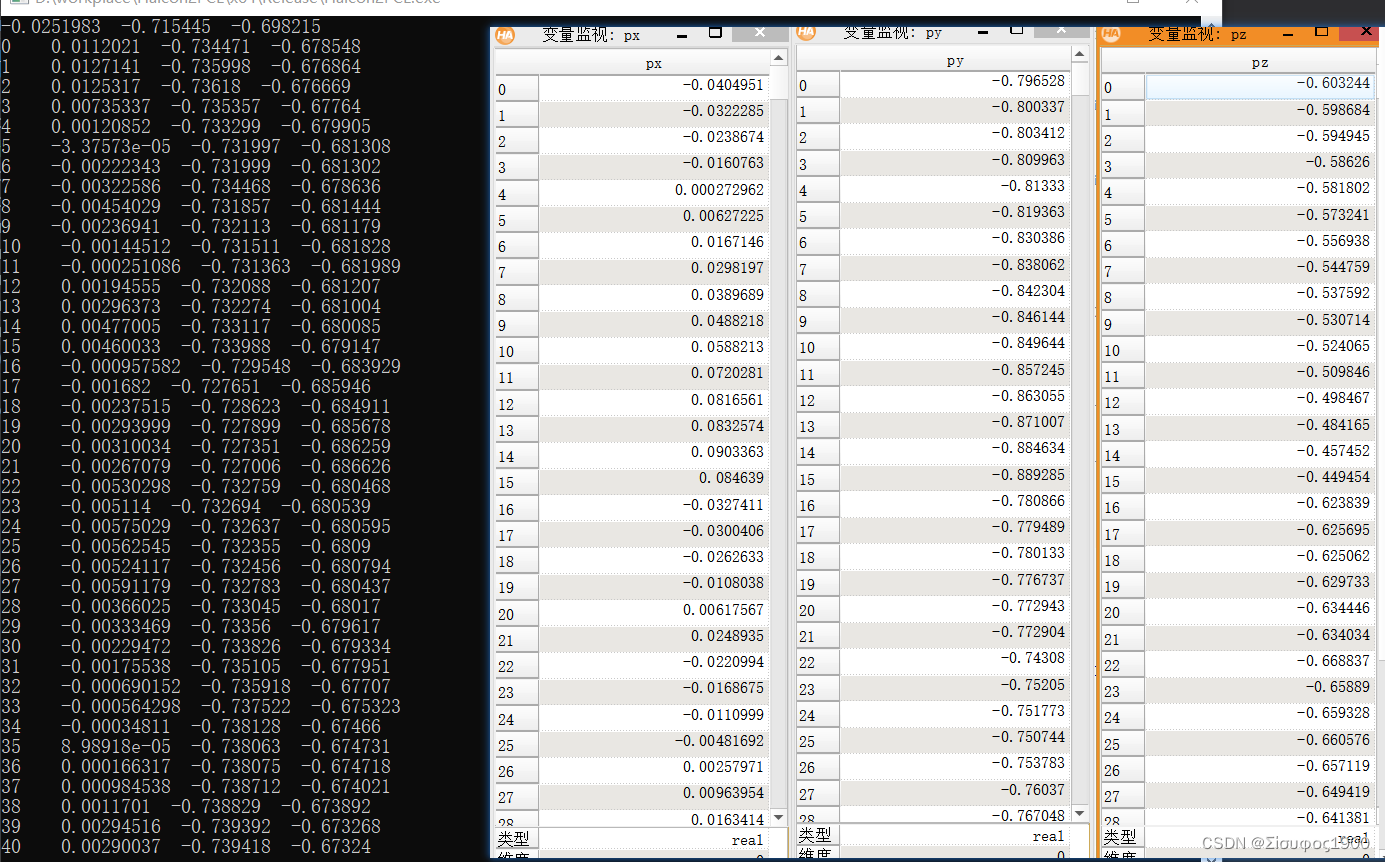
surface_normals_object_model_3d (newObjectModel3D, 'mls', 'mls_kNN', 100, new3Dnormals)
get_object_model_3d_params (new3Dnormals, 'point_normal_x', px)
get_object_model_3d_params (new3Dnormals, 'point_normal_y', py)
get_object_model_3d_params (new3Dnormals, 'point_normal_z', pz)