一、生成一个平面
过程:
单有法向量不能确定一个平面,至少还要有平面上的一个点的坐标才行
假如知道法向量n=(A,B,C)
而平面过某点M=(x0,y0,z0)
那么平面的方程为
A(x-x0)+B(y-y0)+C(z-z0)=0
要在图中画出来,那么先要给x,y一个范围
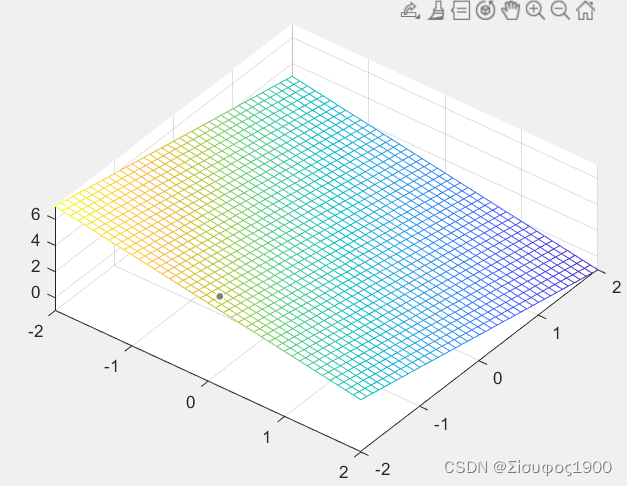
举个离子,平面法向量(1,1,1)过点(0,1,2)
画出x,y在 -2~2区间内的平面
[x y]=meshgrid(-2:0.1:2);
z=2-x-(y-1);
mesh(x,y,z)二、三个点计算平面的法线
p1p2=p2-p1;
p1p3=p3-p1;
n=cross(p1p2,p1p3);
D=-dot(n,p1);
EquationPlane=[n,D];三、平面与三角形的交线
int Interection_Plane_Triangle(Plane &plane,pcl::PointCloud<pcl::PointXYZ>::Ptr &cloud, pcl::PointXYZ &Point1, pcl::PointXYZ &Point2)
{
Eigen::Vector3f v_P1{ cloud->points[0].x, cloud->points[0].y, cloud->points[0].z };
Eigen::Vector3f v_P2{ cloud->points[1].x, cloud->points[1].y, cloud->points[1].z };
Eigen::Vector3f v_P3{ cloud->points[2].x, cloud->points[2].y, cloud->points[2].z };
// 三个点在平面的位置(X-x0)*A +(Y-y0)*B +(Z-z0)*C=0
float d1 = (v_P1[0] - plane.point_X)*plane.normal_A + (v_P1[1] - plane.point_Y)*plane.normal_B + (v_P1[2] - plane.point_Z)*plane.normal_C;
float d2 = (v_P2[0] - plane.point_X)*plane.normal_A + (v_P2[1] - plane.point_Y)*plane.normal_B + (v_P2[2] - plane.point_Z)*plane.normal_C;
float d3 = (v_P3[0] - plane.point_X)*plane.normal_A + (v_P3[1] - plane.point_Y)*plane.normal_B + (v_P3[2] - plane.point_Z)*plane.normal_C;
// 判断三个点分别三个点和平面不相交
if ((d1>0 && d2>0 && d3>0) || (d1<0 && d2<0 && d3<0))
{
return -1;
}
bool s1 = d1<0;
bool s2 = d2<0;
bool s3 = d3<0;
if (s2 != s1)
{
Point1.x = (d2*v_P1[0] - d1*v_P2[0]) / (d2 - d1);
Point1.y = (d2*v_P1[1] - d1*v_P2[1]) / (d2 - d1);
Point1.z = (d2*v_P1[2] - d1*v_P2[2]) / (d2 - d1);
if (s1 != s3)
{
Point2.x = (d1*v_P3[0] - d3*v_P1[0]) / (d1 - d3);
Point2.y = (d1*v_P3[1] - d3*v_P1[1]) / (d1 - d3);
Point2.z = (d1*v_P3[2] - d3*v_P1[2]) / (d1 - d3);
}
else {
Point2.x = (d2*v_P3[0] - d3*v_P2[0]) / (d2 - d3);
Point2.y = (d2*v_P3[1] - d3*v_P2[1]) / (d2 - d3);
Point2.z = (d2*v_P3[2] - d3*v_P2[2]) / (d2 - d3);
}
}
else if (s3 != s1)
{
Point1.x = (d3*v_P1[0] - d1*v_P3[0]) / (d3 - d1);
Point1.y = (d3*v_P1[1] - d1*v_P3[1]) / (d3 - d1);
Point1.z = (d3*v_P1[2] - d1*v_P3[2]) / (d3 - d1);
Point2.x = (d2*v_P3[0] - d3*v_P2[0]) / (d2 - d3);
Point2.y = (d2*v_P3[1] - d3*v_P2[1]) / (d2 - d3);
Point2.z = (d2*v_P3[2] - d3*v_P2[2]) / (d2 - d3);
}
return 0;
}
Halcon代码:
triangulate_object_model_3d (RawPointData3D, 'greedy', ParameterNames, ParameterValues, Surface3DDefault, Info)
write_object_model_3d (Surface3DDefault, 'ply', 'C:/Users/Albert/Desktop/Halcon2PCL/bundy.ply', [], [])
create_pose (0.1, 0.1, 0.1, 90, 90, 90, 'Rp+T', 'gba', 'point', Pose1)
pose2222:=[[69.981483459472656,22.498832702636719,-12.406876564025879,89.999999999999957,-45.000000000000000,44.999999999999972,0]]
pose_to_hom_mat3d (pose2222, HomMat3D2222)
* 生成一个平面
gen_plane_object_model_3d (pose2222, [-1,-1,1,1] * 180, [-1,1,1,-1] * 180, PlaneObjectModel)
* 用平面切
intersect_plane_object_model_3d (Surface3DDefault,pose2222, PlaneCuting_Model3DIntersection)
mesh 平面切割效果:
pcl:
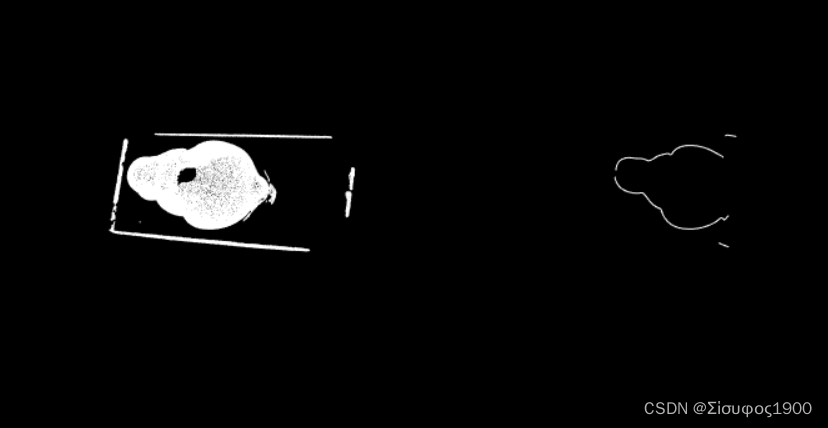
halcon:
