Fast and Accurate Ground Plane Detection for the Visually Impaired from 3D Organized Point Clouds
摘要
本文提出了一种算法,帮助视障人士以快速、安全、可靠和独立的方式导航。利用RGB-D扫描器,提出了增强的RANSAC算法,以消除常见的RANSAC问题。所提出的算法能够检测出面对视障者的地面和障碍物。该算法包括三个主要阶段:数据预处理、地面分割和目标检测。
具体步骤
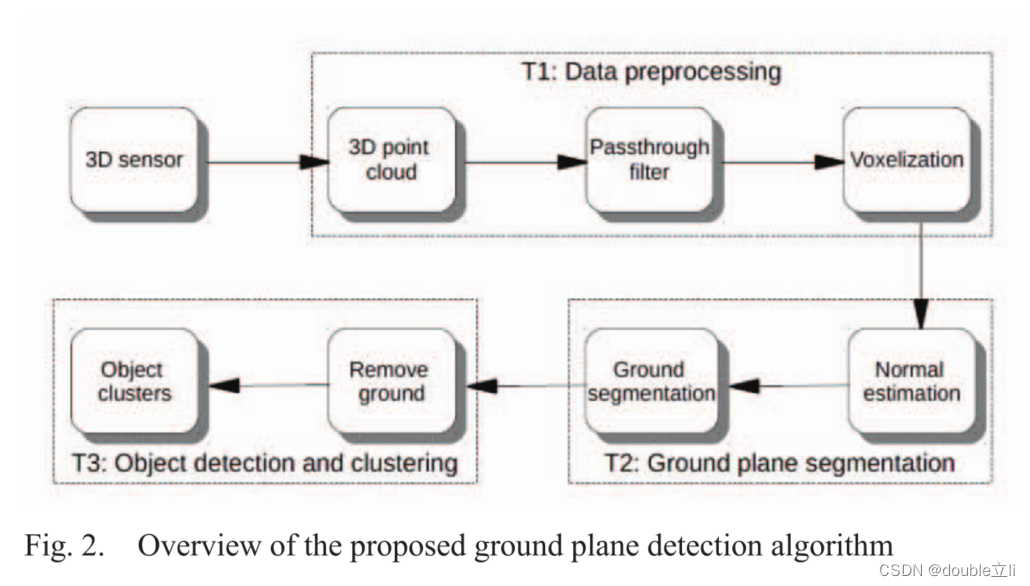
- 数据预处理
直通滤波器:舍弃远处的点(距离远的点噪声大)
体素化:把三维空间点云分成333的网格块,每个块用块内点的质心表示, - 地面分割
法线估计:从周围点邻域(也称为k邻域)中的一个点估计的。
使用RANSAC和曲面法线的平面分割 - 对象检测和聚类
首先,去除检测到的地面,然后将剩余的物体视为障碍物。将欧氏分割(使用pcl::EuclideanClusterExtraction类)应用于其余点,以对对象进行聚类。检查两点之间的距离,如果距离低于阈值,则合并它们。