镜像选择:

2. ROS kinetic安装与使用
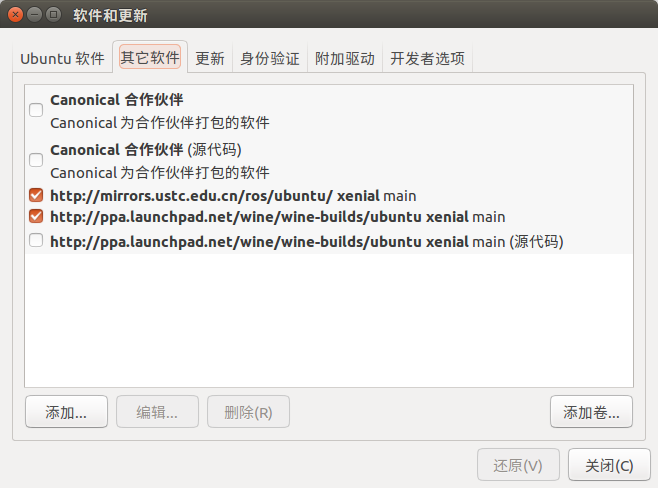
2.1 设置安装源
ROS Kinetic只支持Wily(15.10)和Xenial(16.04)对应内核分别为4.2和4.4,其他版本需要编译安装不支持直接deb软件源安装,
使用下面命令:
~$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

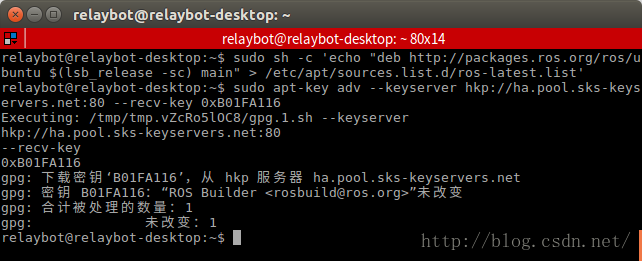
2.2 设置keys
~$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
Executing: /tmp/tmp.vZcRo5lOC8/gpg.1.sh --keyserver
hkp://ha.pool.sks-keyservers.net:80
--recv-key
0xB01FA116
2.3 安装
~$ sudo apt-get update
~$ sudo apt-get install ros-kinetic-desktop-full
安装功能包:
~$ sudo apt-get install ros-kinetic-PACKAGE
例如:
~$ sudo apt-get install ros-kinetic-slam-gmapping
查找在kinetic中可以使用的功能包:
~$ apt-cache search ros-kinetic
2.4 初始化
~$ sudo rosdep init
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please run
rosdep update
~$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index.yaml
Add distro "groovy"
Add distro "hydro"
Add distro "indigo"
Add distro "jade"
Add distro "kinetic"
updated cache in /home/relaybot/.ros/rosdep/sources.cache
2.5 环境配置
~$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
~$ source ~/.bashrc
注意当安装多个ROS发行版,使用kinetic需要用到下面命令:
~$ source /opt/ros/kinetic/setup.bash
2.6 安装rosinstall
~$ sudo apt-get install python-rosinstall
2.7 测试roscore
~$ roscore
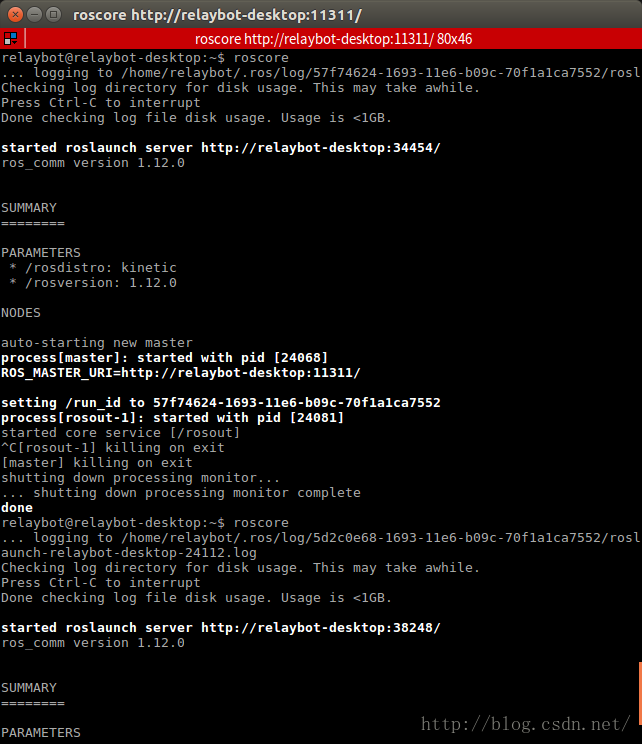
安装ROS成功后,在Beginner Tutorials中有一个简单的示例程序.
- 在Terminal中运行以下命令:
$ roscore - 新开一个terminal,运行以下命令,打开小乌龟窗口:
$ rosrun turtlesim turtlesim_node - 新开一个terminal,运行以下命令,打开乌龟控制窗口,可使用方向键控制乌龟运动:
$ rosrun turtlesim turtle_teleop_key - 选中控制窗口,按方向键,可看到小乌龟窗口中乌龟在运动。
- 新开一个terminal,运行以下命令,可以看到ROS的图形化界面,展示结点的关系:
$ rosrun rqt_graph rqt_graph - 至此,测试完成,说明ROS安装没有问题。
个人分类: 软件