文章目录
分割依据的灰度值基本性质是:不连续性和相似性。本章中的大多数分割算法均基于灰度值的两个基本性质。第一类方法根据 灰度的突变,如 边缘 将图像分割为多个区域;第二类方法根据一组 预定义的准则 将图像分割为多个区域 。 阈值处理、区域生长、区域分离和聚合都是这类方法的例子 。
10.2 点、线和边缘检测
图像特征:孤立点、线和边缘。
10.2.2 孤立点的检测
点检测应以二阶导数为基础。使用的拉普拉斯核(它与图3.45(b)中的核相同),若滤波器在这一点的响应的绝对值超过一个规定的阈值,则我们说在核的中心位置 ( x , y ) (x, y) (x,y) 检测到了一个点。

10.2.3 线检测
复杂度更高的检测是线检测。 对于线检测, 也可使用图10.4(a)中的拉普拉斯核, 但必须正确处理二阶导数的双线效应。
10.2.4 边缘模型
三类边缘模型:台阶、斜坡、屋顶边缘模型
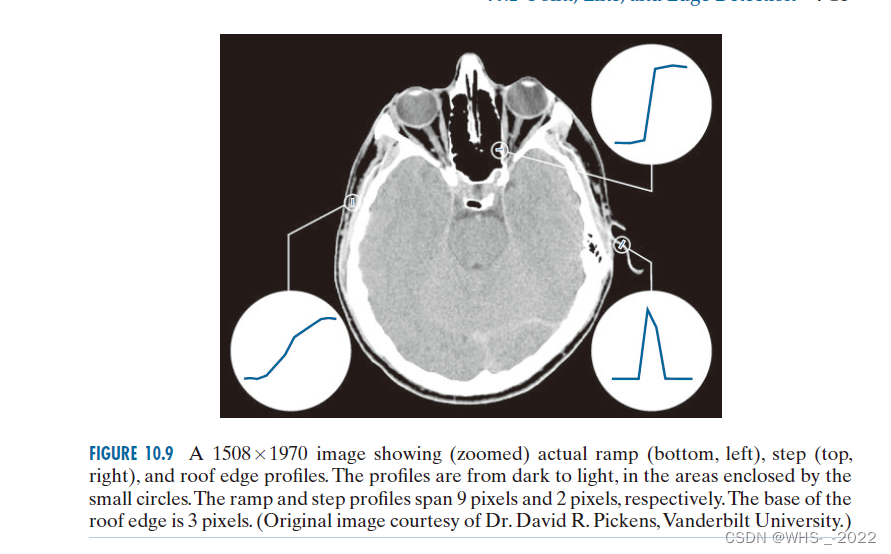
微弱的可见噪声严重影响检测边缘所用的两个 关键导数。
边缘检测的步骤:
-
为了降低噪声,对图像进行 平滑处理 。
-
检测边缘点。从图像中提取可能是边缘点的所有点 候选边缘点 。
-
边缘定位。目的是 从候选边缘点中选择组成边缘的点集中的成员点 。
10.3 阈值处理
由于图像阈值处理直观、 实现简单且计算速度快, 因此在图像分割应用中处于核心地位。
从背景中提取目标的一种明显方法是, 选择一个分隔这些模式的阈值 T T T。 然后, 图像中 f ( x , y ) > T f(x, y)>T f(x,y)>T 的任何点 ( x , y ) (x, y) (x,y), 称为一个目标点; 否则,该点称为背景点。 换句话说,分割后的图像 g ( x , y ) g(x, y) g(x,y) 为:
g ( x , y ) = { 1 , f ( x , y ) > T 0 , f ( x , y ) ≤ T (10.46) g(x, y)=\left\{\begin{array}{l} 1, f(x, y)>T \\ \\ 0, f(x, y) \leq T \end{array}\right.\tag{10.46} g(x,y)=⎩ ⎨ ⎧1,f(x,y)>T0,f(x,y)≤T(10.46)
当T是一个适用于整个图像的常数时, 式(10.46)给出的处理称为全局阈值处理。 当 T T T 值在一幅图像上变化时, 称为可变阈值处理。
灰度阈值处理能否成功, 与分隔直方图模式的波谷的宽度和深度有关。
噪声
噪声污染较强的情况下,没有希望为分割图像找到一个合适的阈值。
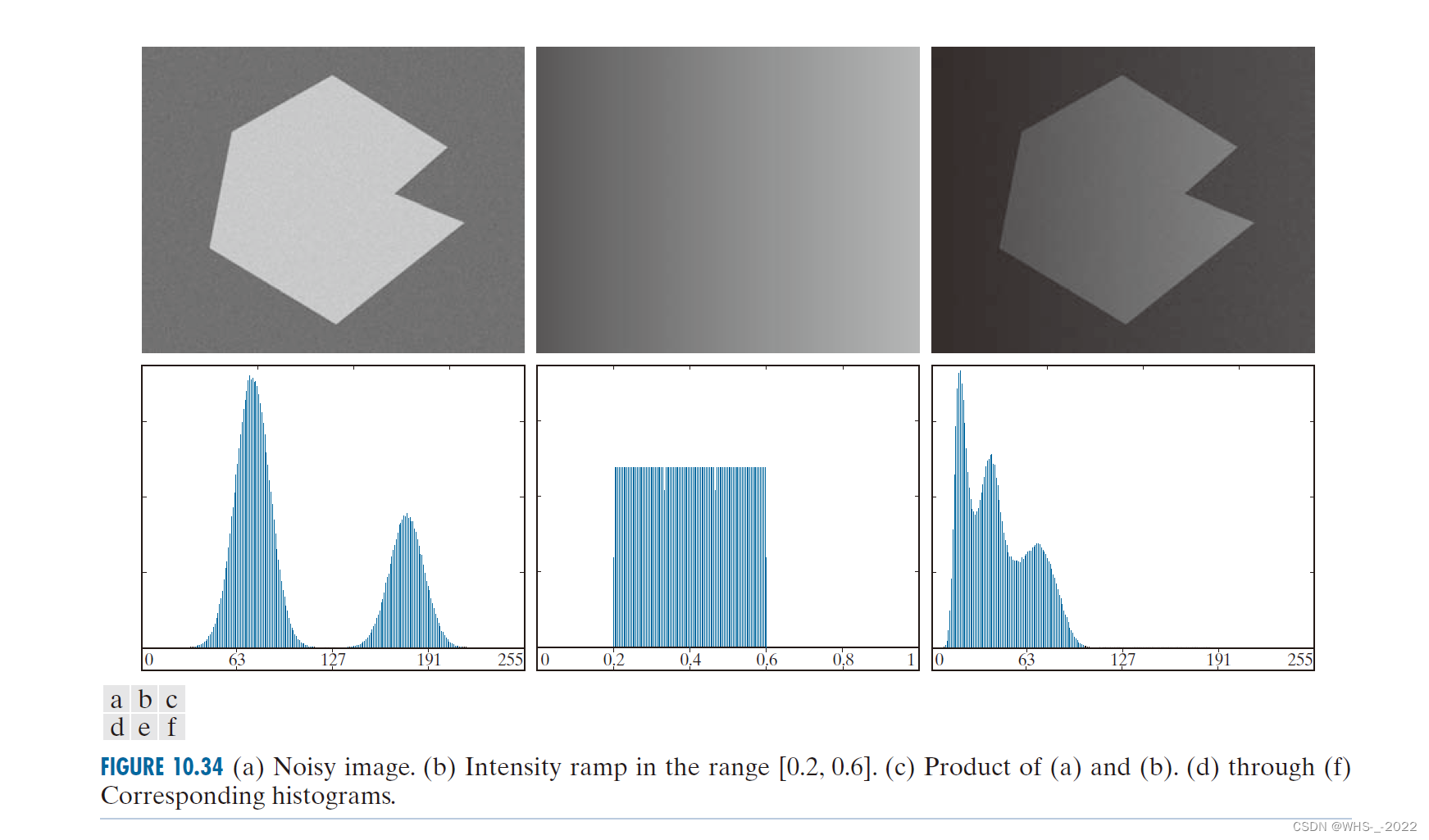
光照和反射
图10.34(f)是光照不均匀图像(c)的直方图,可见:波峰之间的深谷会破坏到模式无法分割的程度。 如果光照非常均匀, 但(目标和/或背景表面自然反射率的变化导致的)图像反射不均匀, 也会得到类似结果。
在使用阈值或其他分割技术分割图像时,光照和反射起核心作用。
基本的全局阈值处理
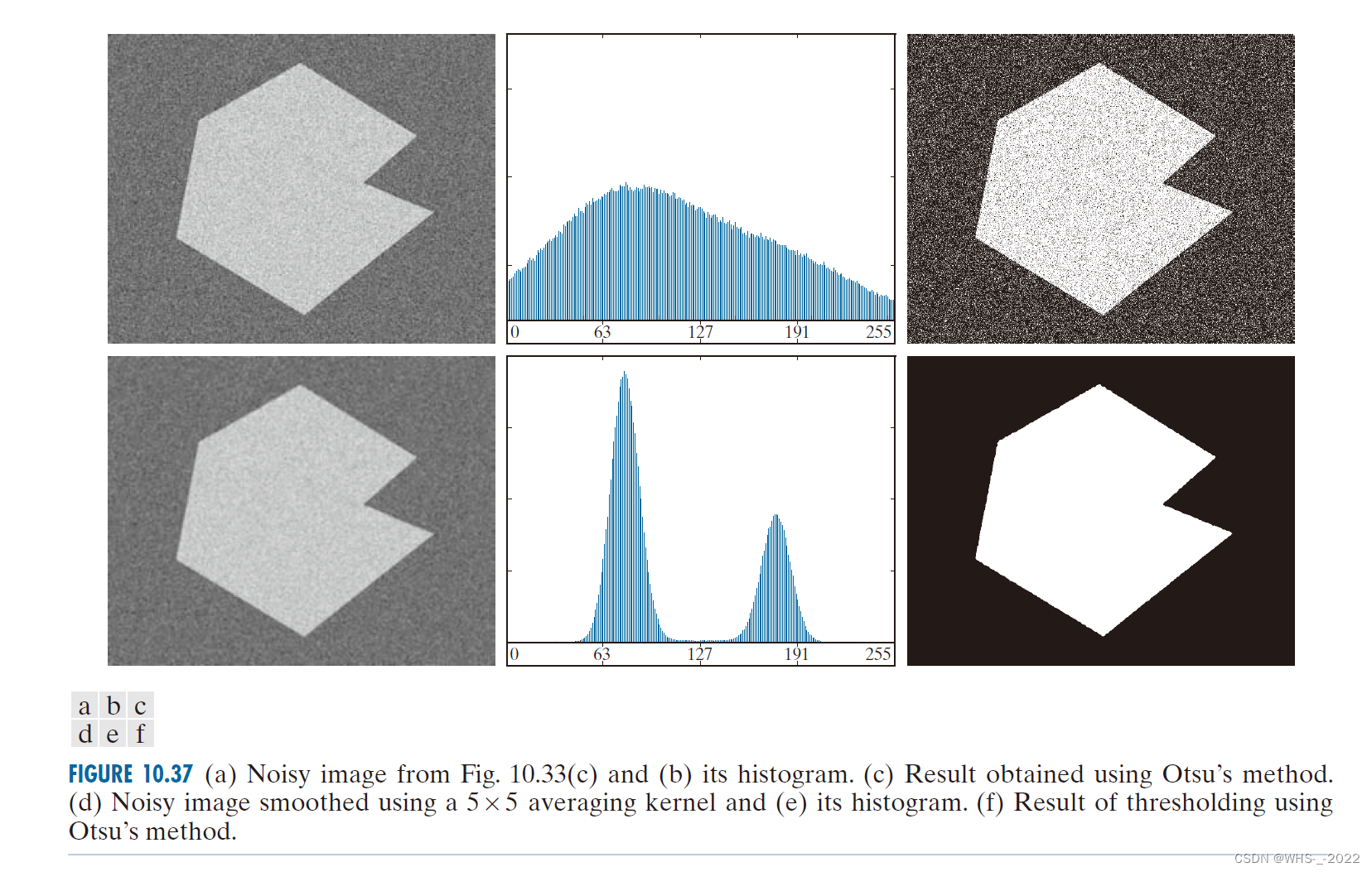
10.3.4 使用图像平滑改进全局阈值处理
如图10.33所示, 噪声会使得简单的阈值处理问题变得不可求解。当无法从源头降低噪声, 并且阈值处理是首选分割方法时, 增强分割性能的一种技术通常是:在阈值处理之前先平滑图像。
10.3.5 使用边缘改进全局阈值处理
若只利用位于或接近目标和背景间的边缘的像素, 则得到的直方图将有几个高度近似相同的波峰。 此外, 任何位于目标上的像素的概率, 将近似等于其位于背景上的概率, 从而改进了直方图模式的对称性。
使用满足某些基于梯度和拉普拉斯的简单测度的像素, 有加深直方图波峰间的波谷的倾向。
10.4 使用区域生长、区域分离与聚合进行分割
区域生长、区域分离与聚合。