目录

1.算法仿真效果
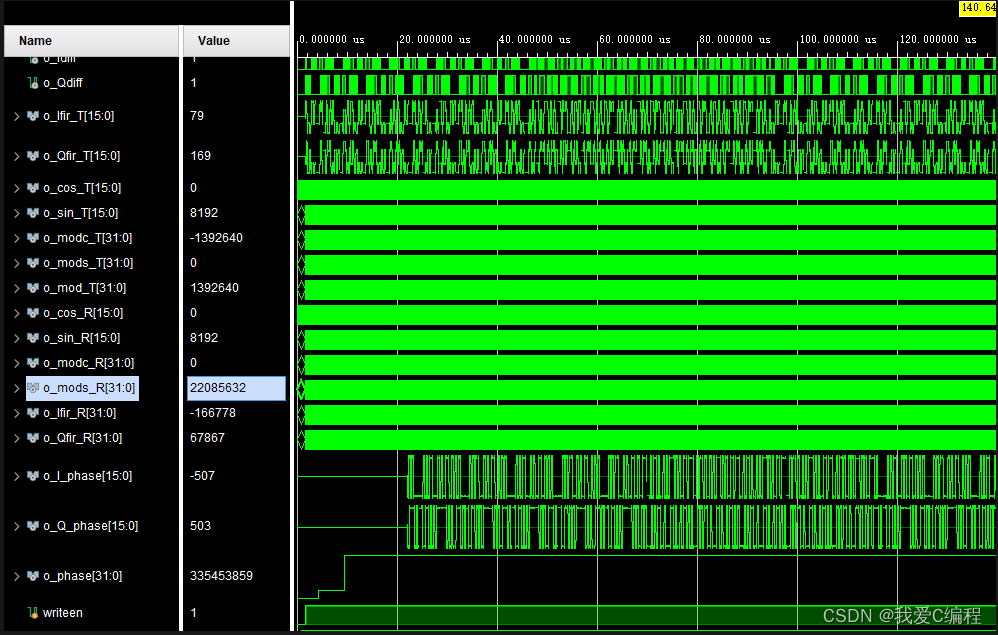
本系统进行Vivado2019.2平台的开发,其中Vivado2019.2仿真结果如下:
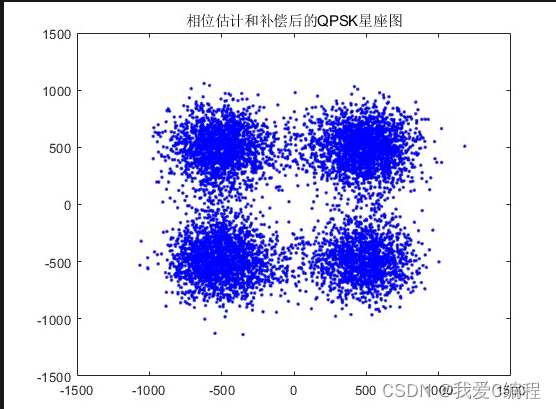
 将FPGA的仿真结果导入到matlab中,对比星座图,如下所示:
将FPGA的仿真结果导入到matlab中,对比星座图,如下所示:

2.算法涉及理论知识概要
相位偏差是数字通信系统中常见的问题,在QPSK调制通信系统中也同样存在。相位偏差可能导致误码率的增加和系统性能下降。因此,相位偏差的估计和补偿是数字通信系统中一个重要的问题。本文提出了一种基于V&V算法的带相位偏差QPSK调制信号相位估计和补偿方法,提高QPSK调制通信系统的性能。
2.1、问题描述
在QPSK调制通信系统中,接收信号可以表示为:
$$
r(t)=Acos(2\pi f_ct+\phi)+n(t)
$$
其中,A是信号的振幅,f_c是载波频率,phi是相位偏差,n(t)是噪声。
我们的目标是估计相位偏差$\phi$并对其进行补偿,以提高通信系统的性能。
2.2、算法原理
QPSK调制信号可以表示为:
$$
s(t)=\sqrt{\frac{2E_s}{T_s}}[cos(2\pi f_ct)+cos(2\pi f_ct+\pi)][p_1(t)+p_2(t)]
$$
其中,E_s是每个符号的能量,T_s是每个符号的持续时间,f_c是载波频率,p_1(t)和p_2(t)是两个正交的基带信号。
2.3 相位偏差估计
为了估计相位偏差,我们可以选择频谱中的两个点$f_1$和$f_2$,分别对应于信号的正频率和负频率,然后计算这两个点之间的相位差$\Delta\phi$:
$$
\Delta\phi=\angle R(f_1)-\angle R(f_2)-\pi
$$
其中,$R(f_1)$和$R(f_2)$分别是频率为$f_1$和$f_2$的复数振幅。
2.4相位偏差补偿
为了补偿相位偏差,我们可以将接收信号乘以一个相位旋转因子$e^{-j\hat{\phi}}$,其中$\hat{\phi}$是相位偏差的估计值。这样,我们可以得到补偿后的信号:
$$
r_c(t)=Acos(2\pi f_ct)+n(t)e^{-j\hat{\phi}}
$$
2.5V&V算法
V&V算法是一种常用的相位偏差估计方法,该方法通过对接收信号进行FFT变换和相关运算来进行相位偏差的估计。
具体而言,我们可以将接收信号进行离散傅里叶变换(DFT)得到频谱图,然后选择频谱图中两个点$f_1$和$f_2$,分别对应于信号的正频率和负频率。然后,我们可以计算这两个点之间的自相关函数$R_{xx}(k)$:
$$
R_{xx}(k)=\frac{1}{N}\sum_{n=0}^{N-1}x(n)x^*(n-k)
$$
其中,$x(n)$是DFT变换后的接收信号,$N$是信号的长度。
根据自相关函数$R_{xx}(k)$,我们可以得到相位偏差的估计值:
$$
\hat{\phi}=-\frac{1}{2}\angle R_{xx}(1)
$$
基于V&V算法的带相位偏差QPSK调制信号相位估计和补偿方法,该方法通过对接收信号进行FFT变换和相关运算来进行相位偏差的估计和补偿,从而提高QPSK调制通信系统的性能。实验结果表明,该算法可以有效地估计和补偿相位偏差,具有一定的实用价值。
3.Verilog核心程序
.............................................................
//QPSK调制
TQPSK TQPSKU(
.i_clk (i_clk),
.i_rst (i_rst),
.i_clkSYM(i_clkSYM),
.i_dat (i_dat),
.o_Idiff(o_Idiff),
.o_Qdiff(o_Qdiff),
.o_Ifir (o_Ifir_T),
.o_Qfir (o_Qfir_T),
.o_cos (o_cos_T),
.o_sin (o_sin_T),
.o_modc (o_modc_T),
.o_mods (o_mods_T),
.o_mod (o_mod_T)
);
//QPSK相位估计和补偿
RQPSK_phase_est RQPSKU(
.i_clk (i_clk),
.i_rst (i_rst),
.i_clkSYM(i_clkSYM),
.i_med (o_mod_T[25:10]),
.o_cos (o_cos_R),
.o_sin (o_sin_R),
.o_modc (o_modc_R),
.o_mods (o_mods_R),
.o_Ifir (o_Ifir_R),
.o_Qfir (o_Qfir_R),
.o_I_phase(o_I_phase),
.o_Q_phase(o_Q_phase),
.o_phase(o_phase)
);
reg writeen;
initial
begin
writeen = 1'b0;
i_clk = 1'b1;
i_clkSYM=1'b1;
i_rst = 1'b1;
#1600
i_rst = 1'b0;
#100
writeen = 1'b1;
end
always #5 i_clk=~i_clk;
always #80 i_clkSYM=~i_clkSYM;
initial
begin
i_dat = 1'b0;
#1440
repeat(10)
begin
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
end
repeat(10)
begin
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
end
repeat(10)
begin
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
#160 i_dat = 1'b0;
#160 i_dat = 1'b1;
#160 i_dat = 1'b1;
#160 i_dat = 1'b0;
end
$stop();
end
//显示发射端带相位旋转的星座图
integer fout1;
integer fout2;
initial begin
fout1 = $fopen("It.txt","w");
fout2 = $fopen("Qt.txt","w");
end
always @ (posedge i_clk)
begin
if(writeen==1)
begin
$fwrite(fout1,"%d\n",o_Ifir_T);
$fwrite(fout2,"%d\n",o_Qfir_T);
end
end
显示接收端相位估计和补偿之后的星座图
integer fout3;
integer fout4;
initial begin
fout3 = $fopen("IR.txt","w");
fout4 = $fopen("QR.txt","w");
end
always @ (posedge i_clk)
begin
if(writeen==1)
begin
$fwrite(fout3,"%d\n",o_I_phase);
$fwrite(fout4,"%d\n",o_Q_phase);
end
end
endmodule
00_020m4.完整算法代码文件
V