1 纵向车辆动力学
在坡道上考虑。


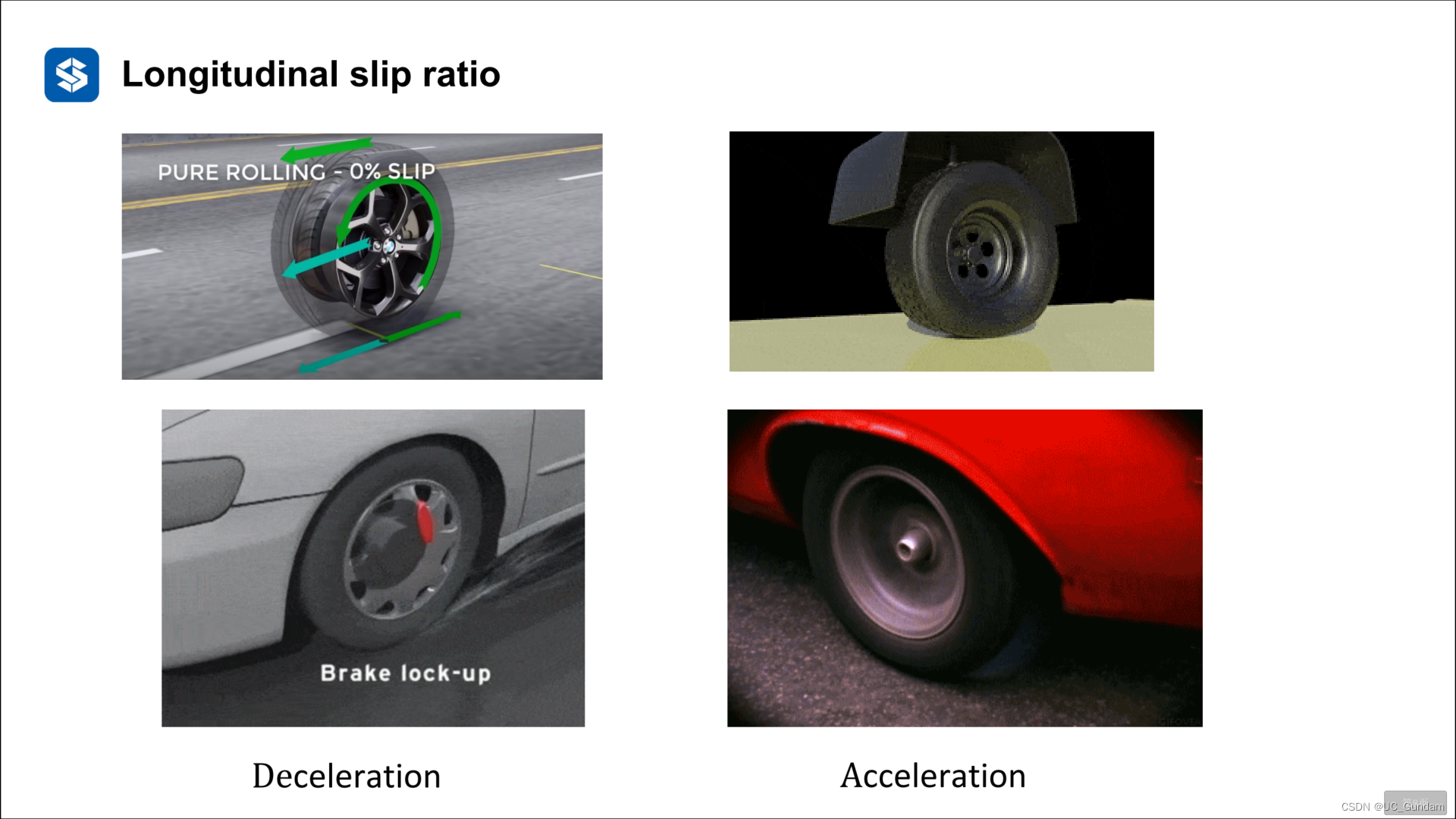
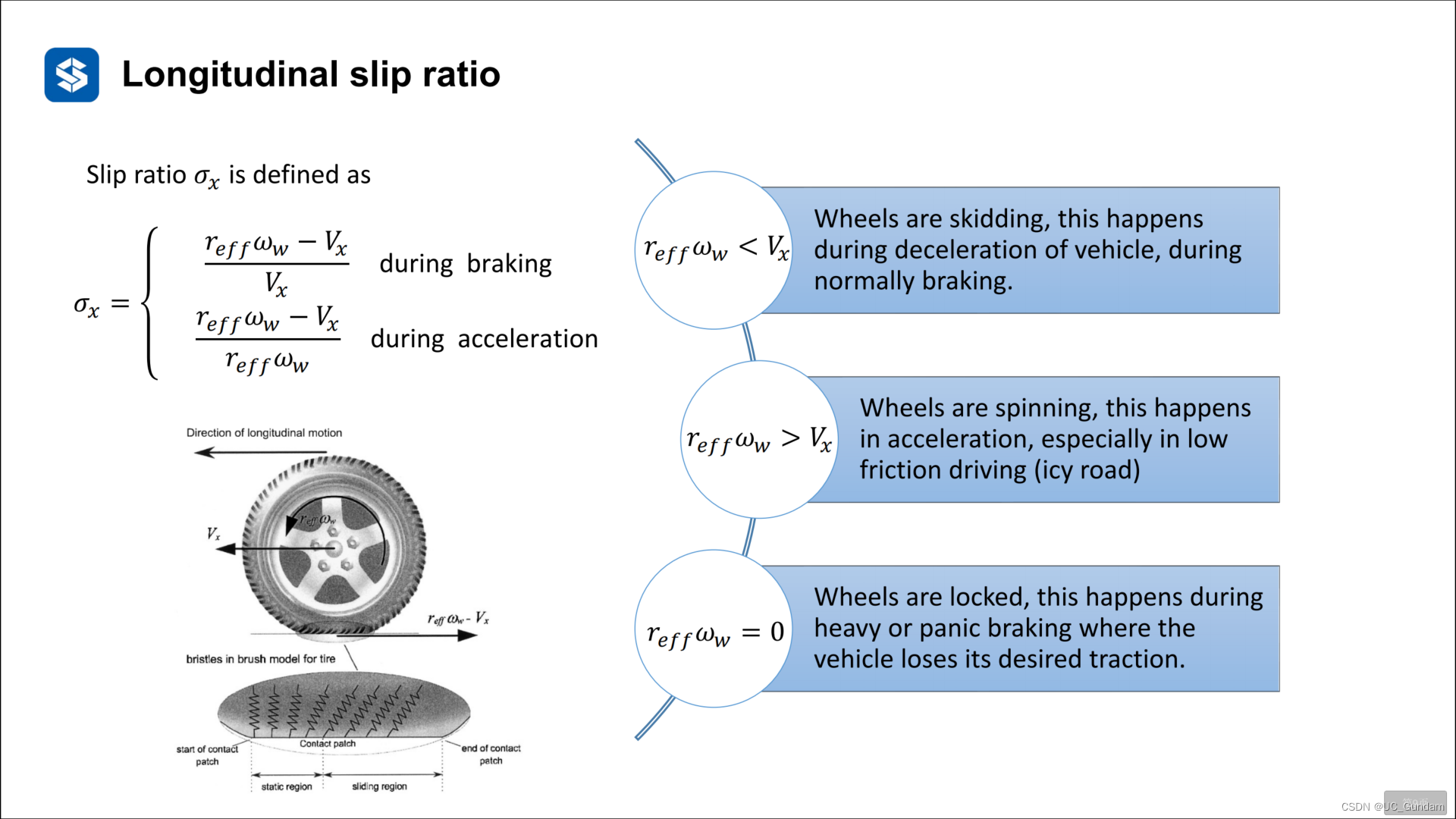
滑动与滑转的判断:滑移率(制动),滑转率(加速)
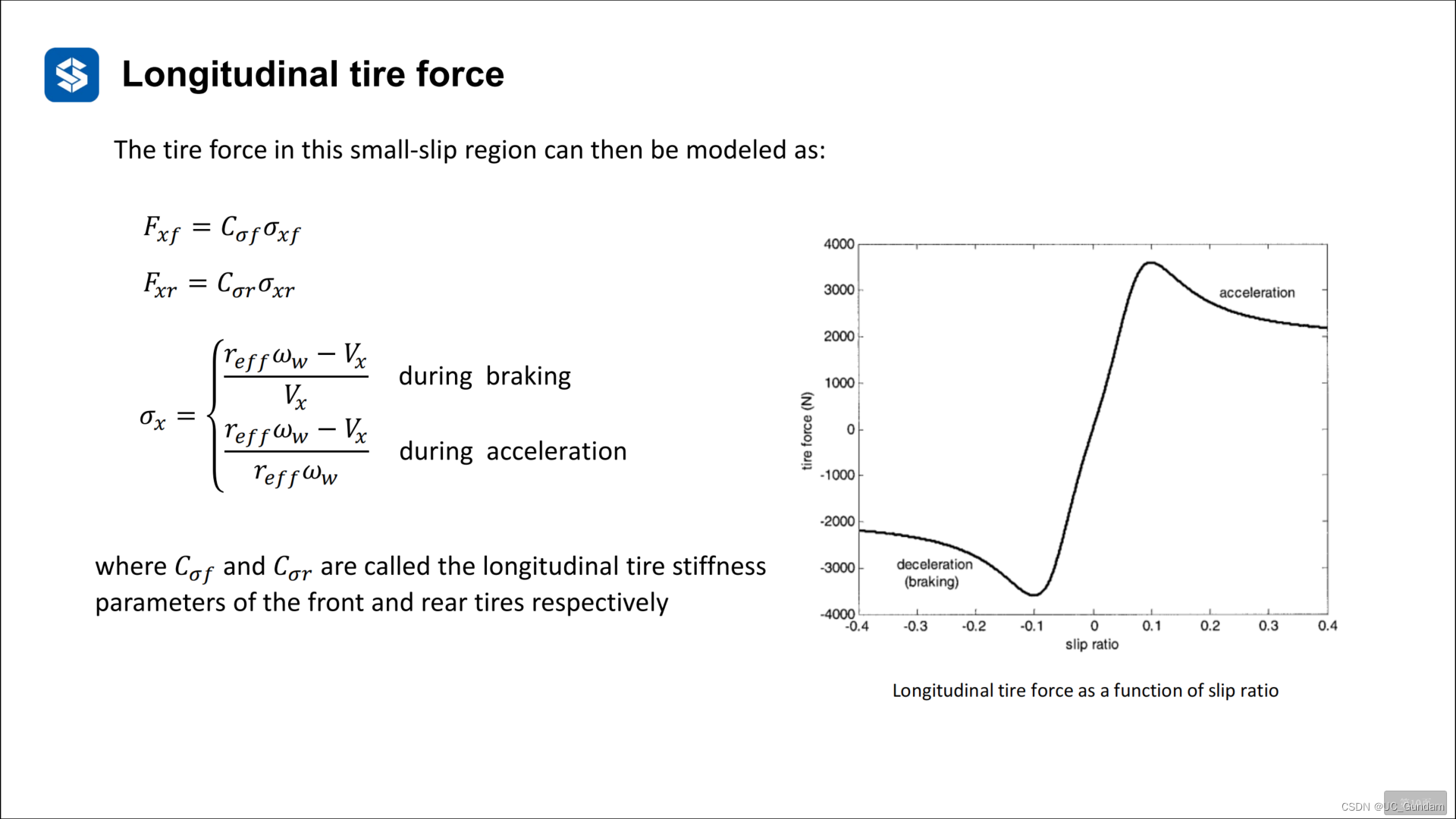
车轮滑动率曲线,中间直线段斜率表示为纵向刚度。
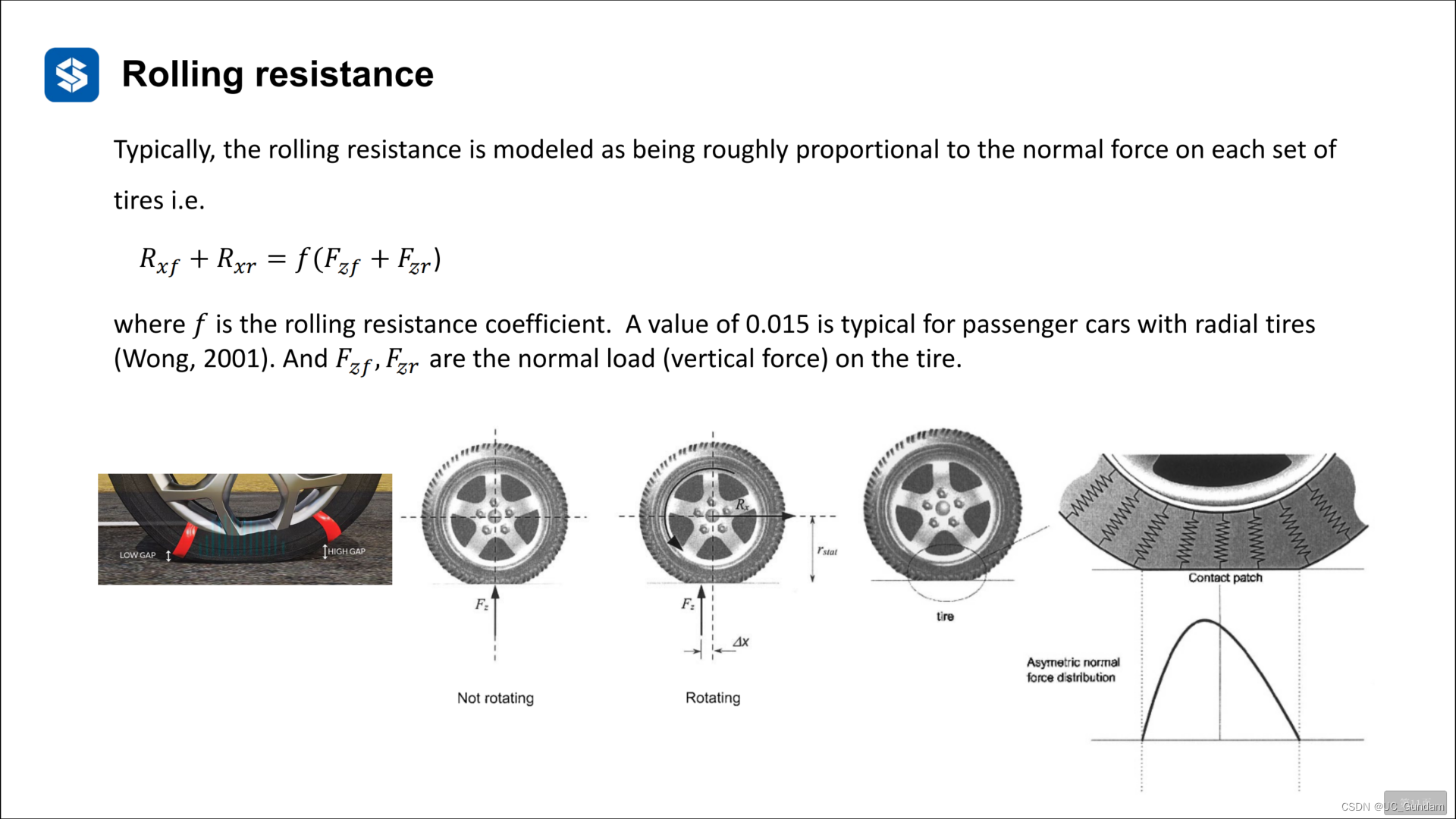
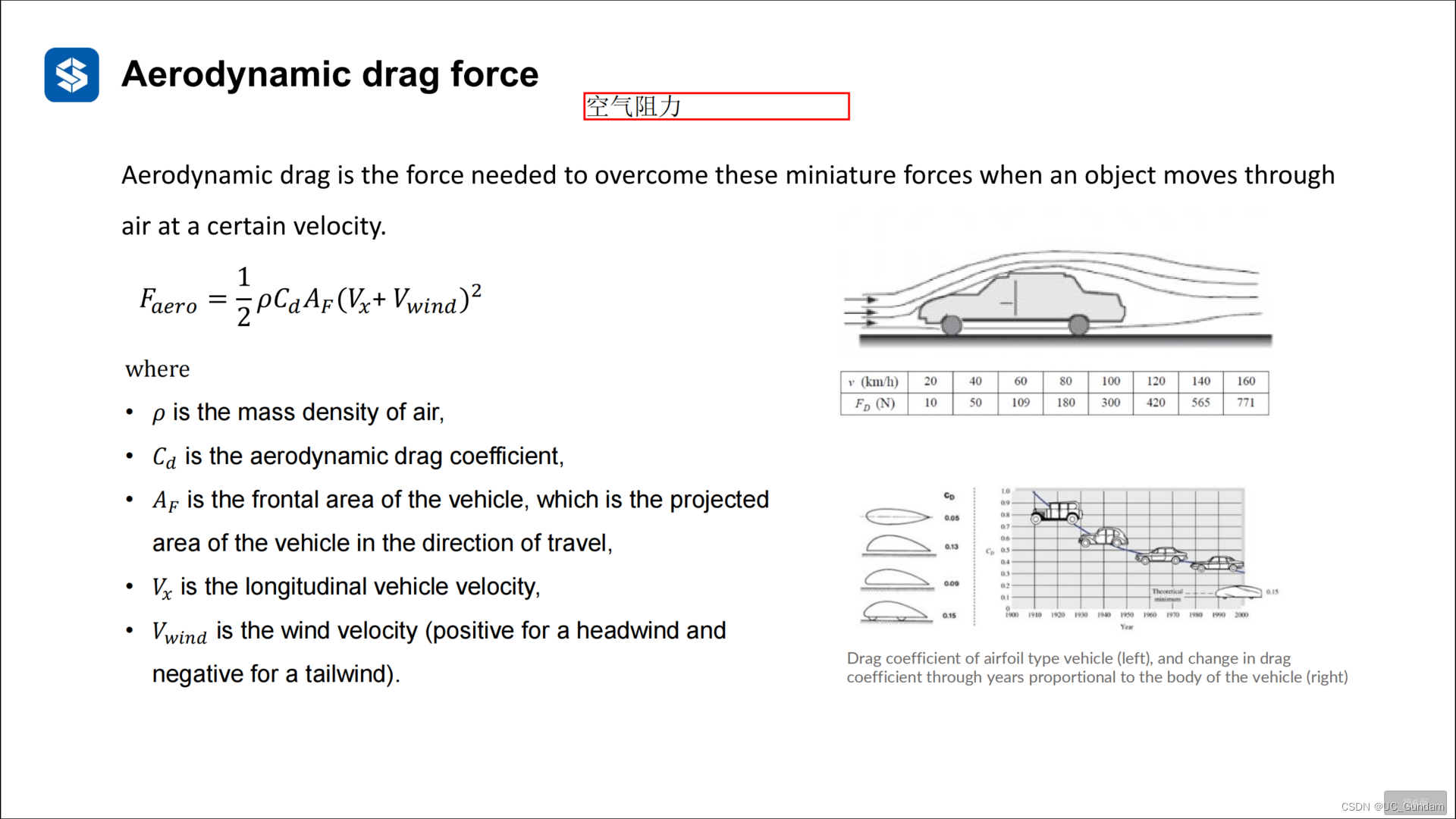
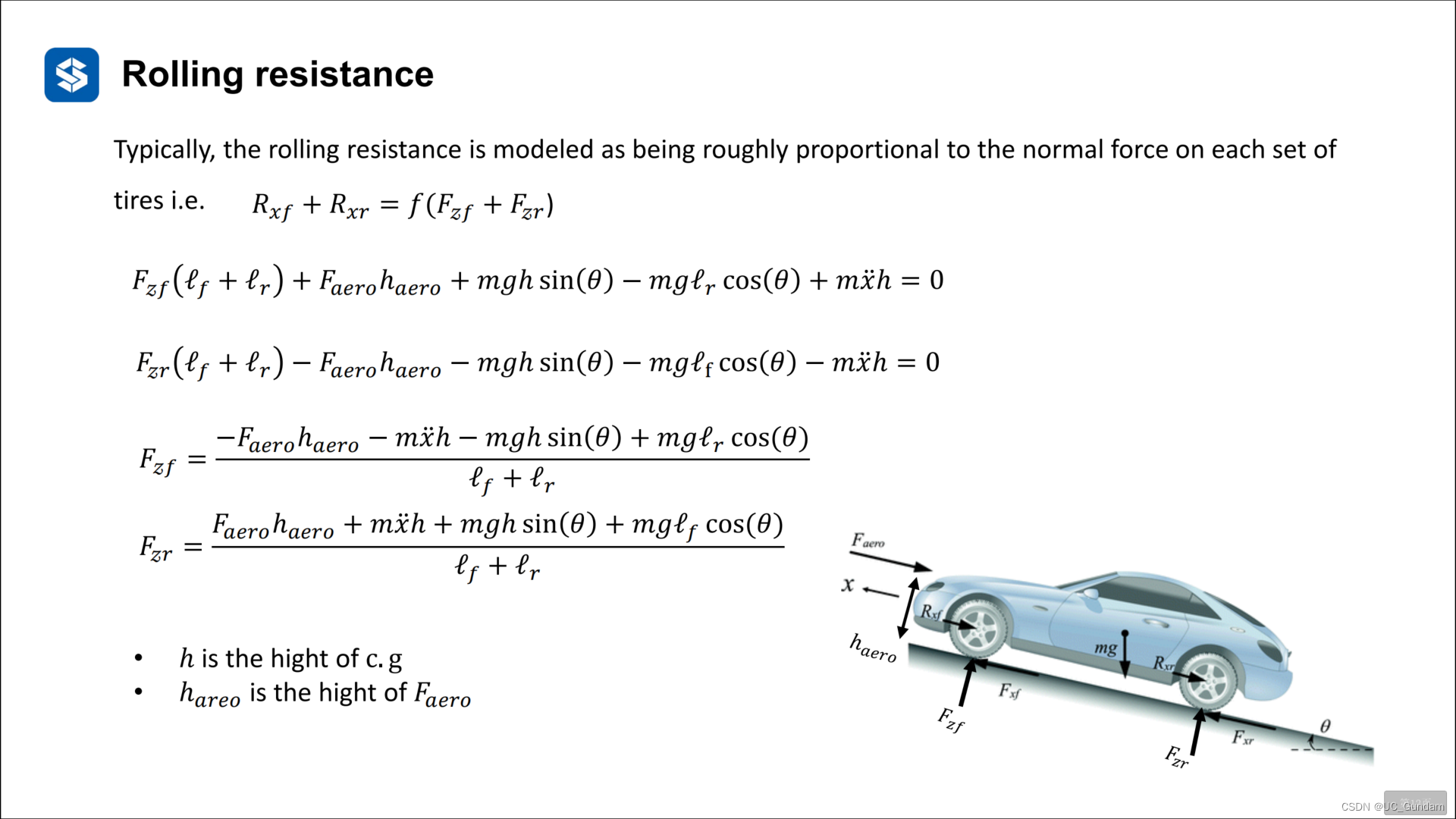
计算斜面上车辆系统受到的各种力。(以前后轮接地中心为坐标原点,建立力矩平衡方程)
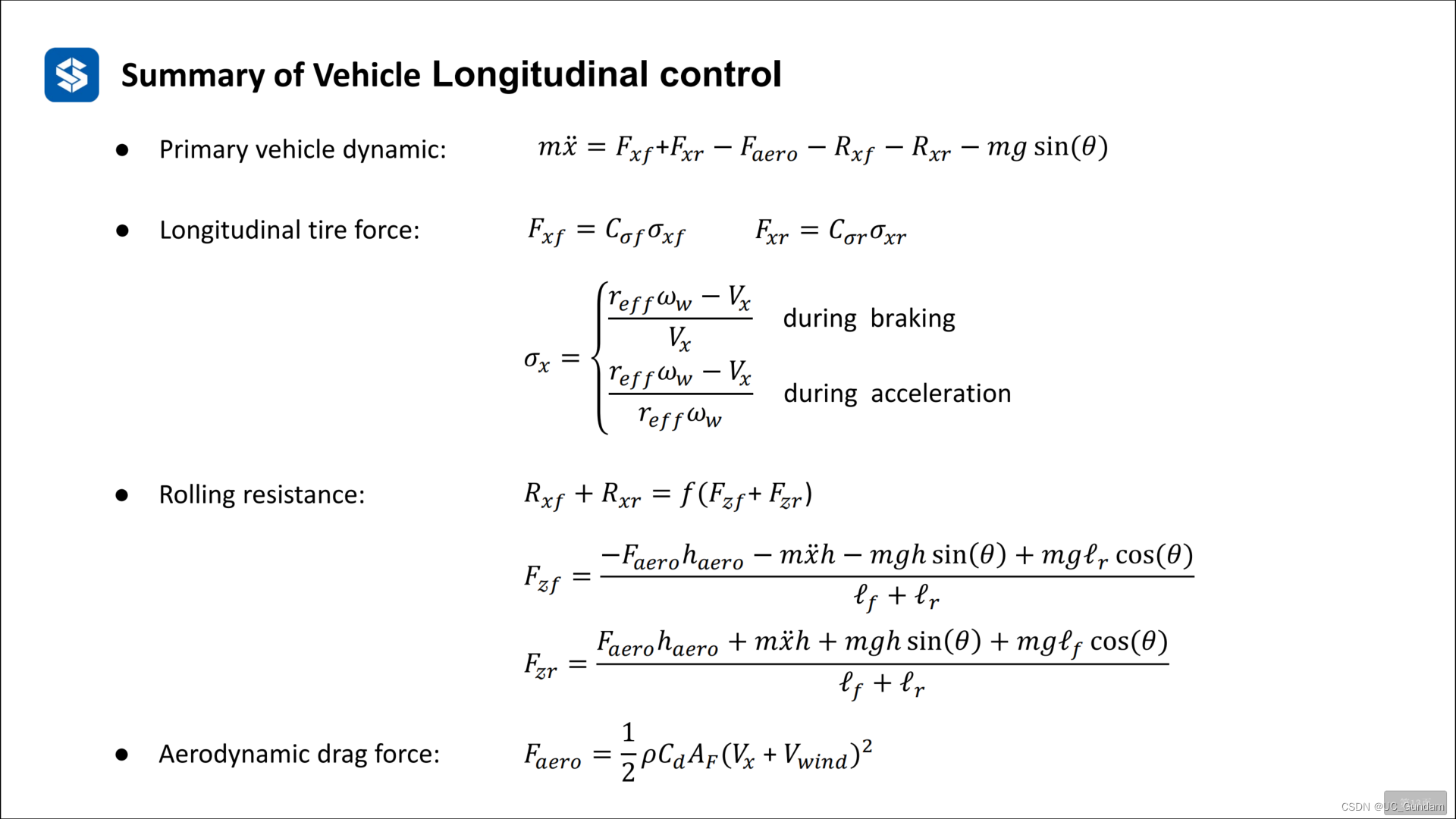
车辆纵向力的总结:
2 车辆纵向控制

纵向控制基本介绍。
2.1 基本控制理论
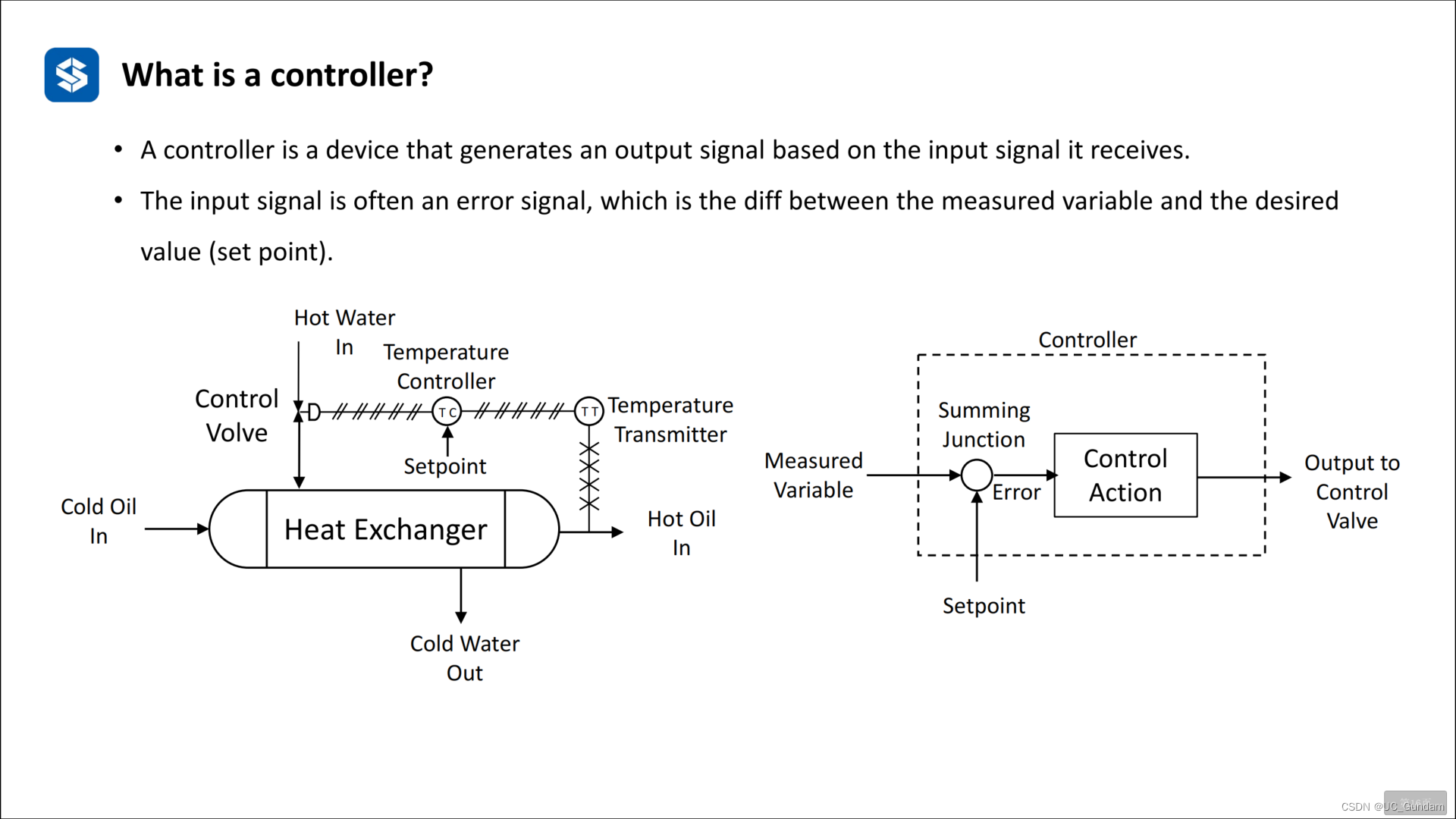
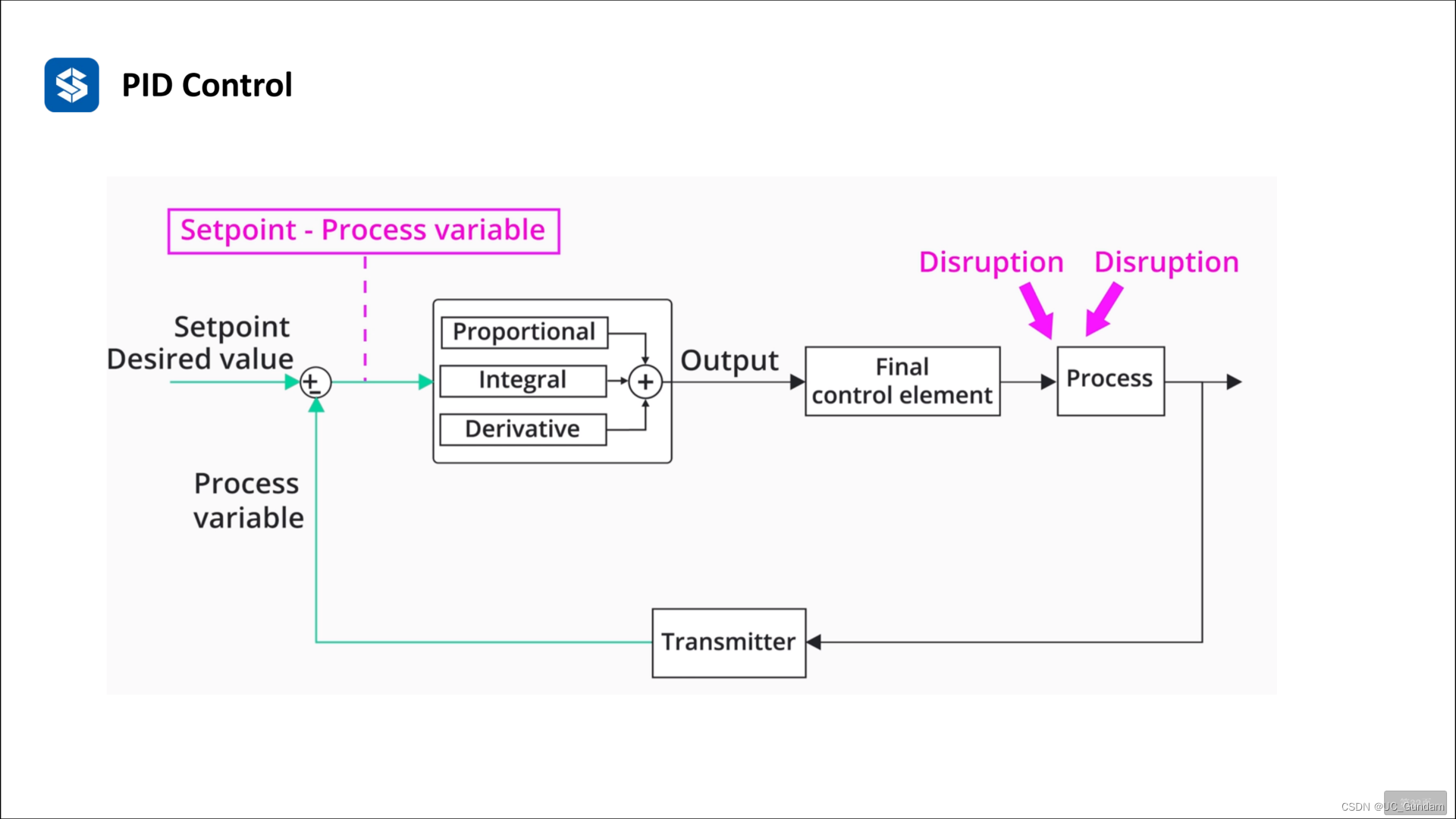
控制器基本模型:输入与输出。输入一般为测量量与预期量计算的误差信号。
经典控制理论,时变系统高阶复杂——拉普拉斯变换为微分方程,频域系统
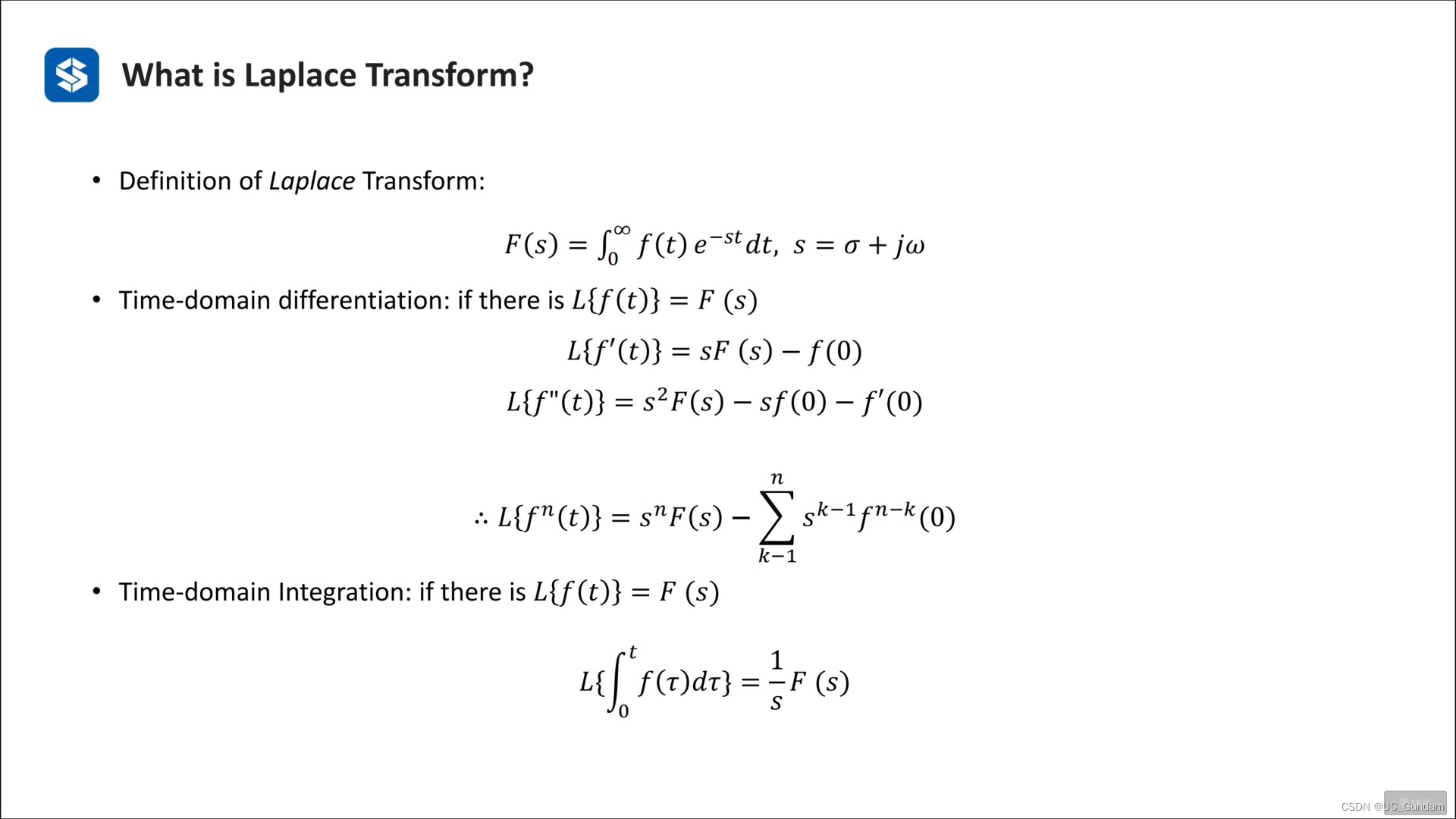
拉普拉斯变换
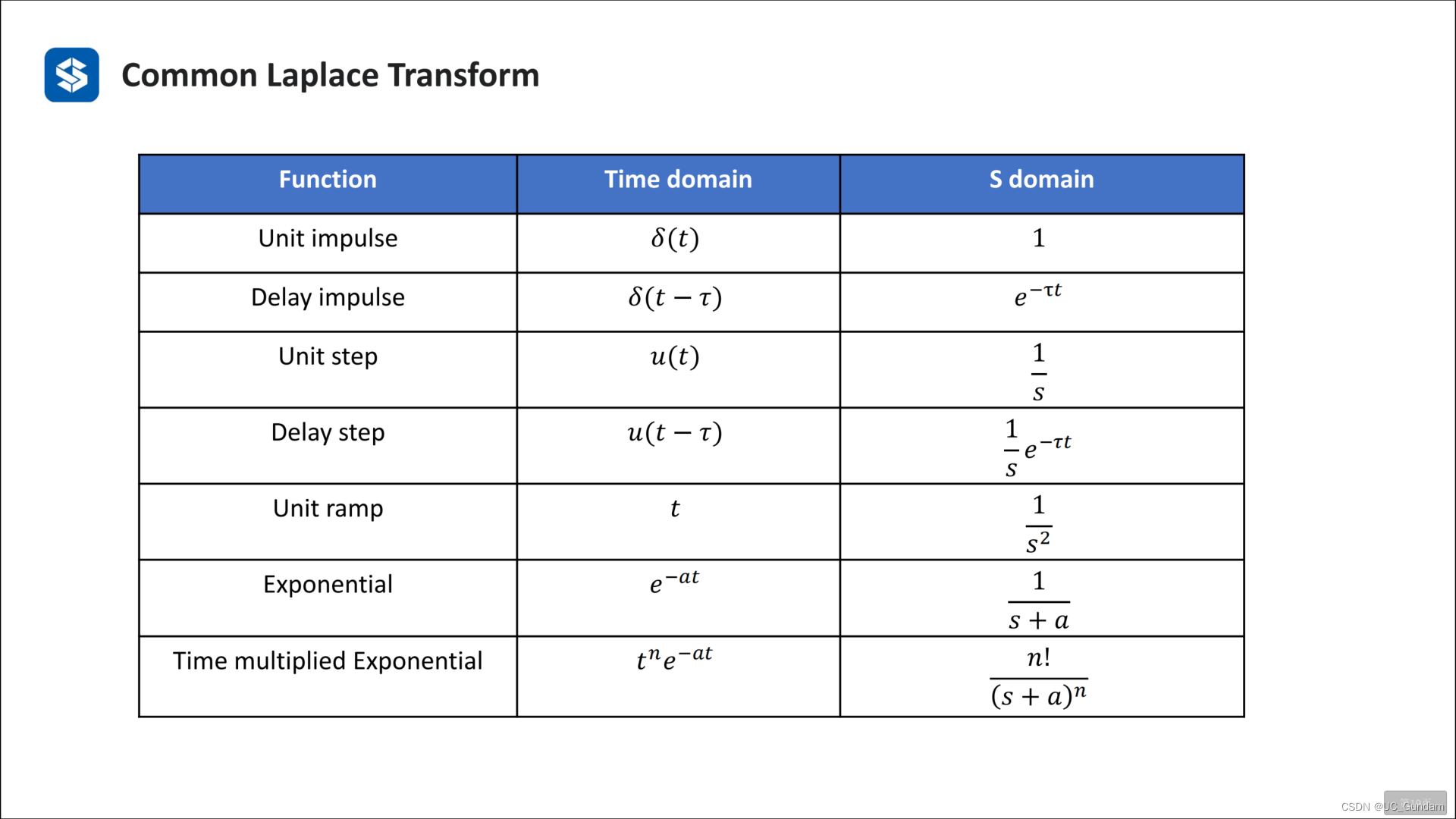
常用的拉氏变换
传递函数,拉氏变换初值为0转换而来
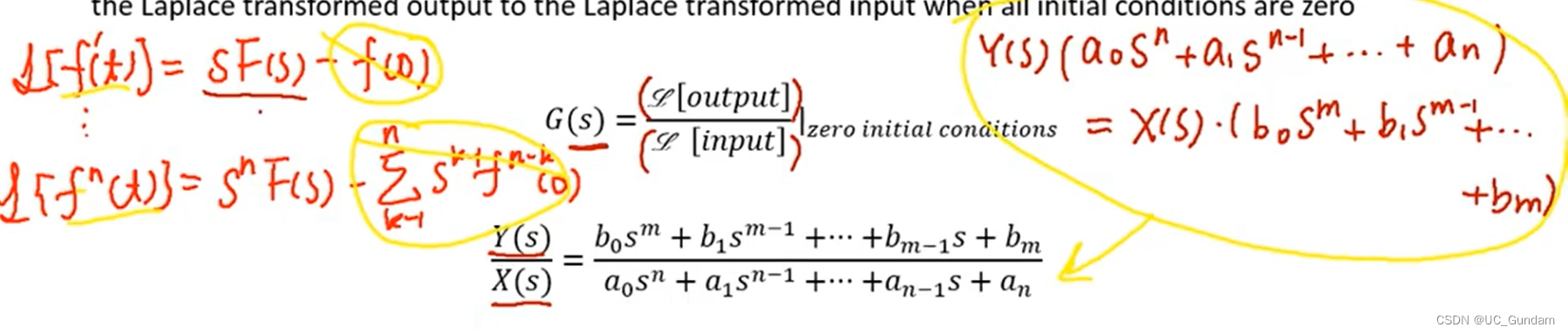
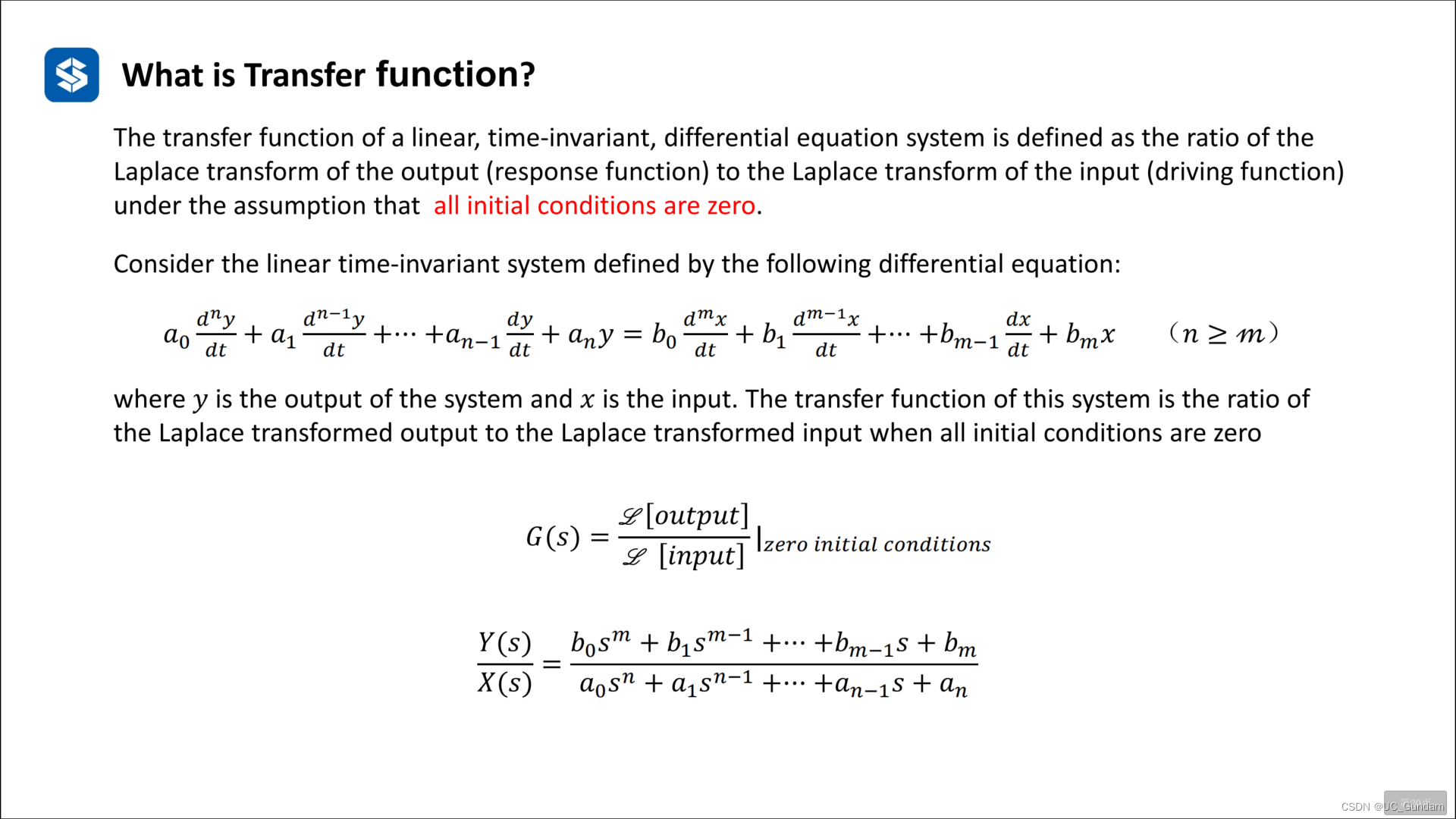
如何构建一个系统的传递函数:
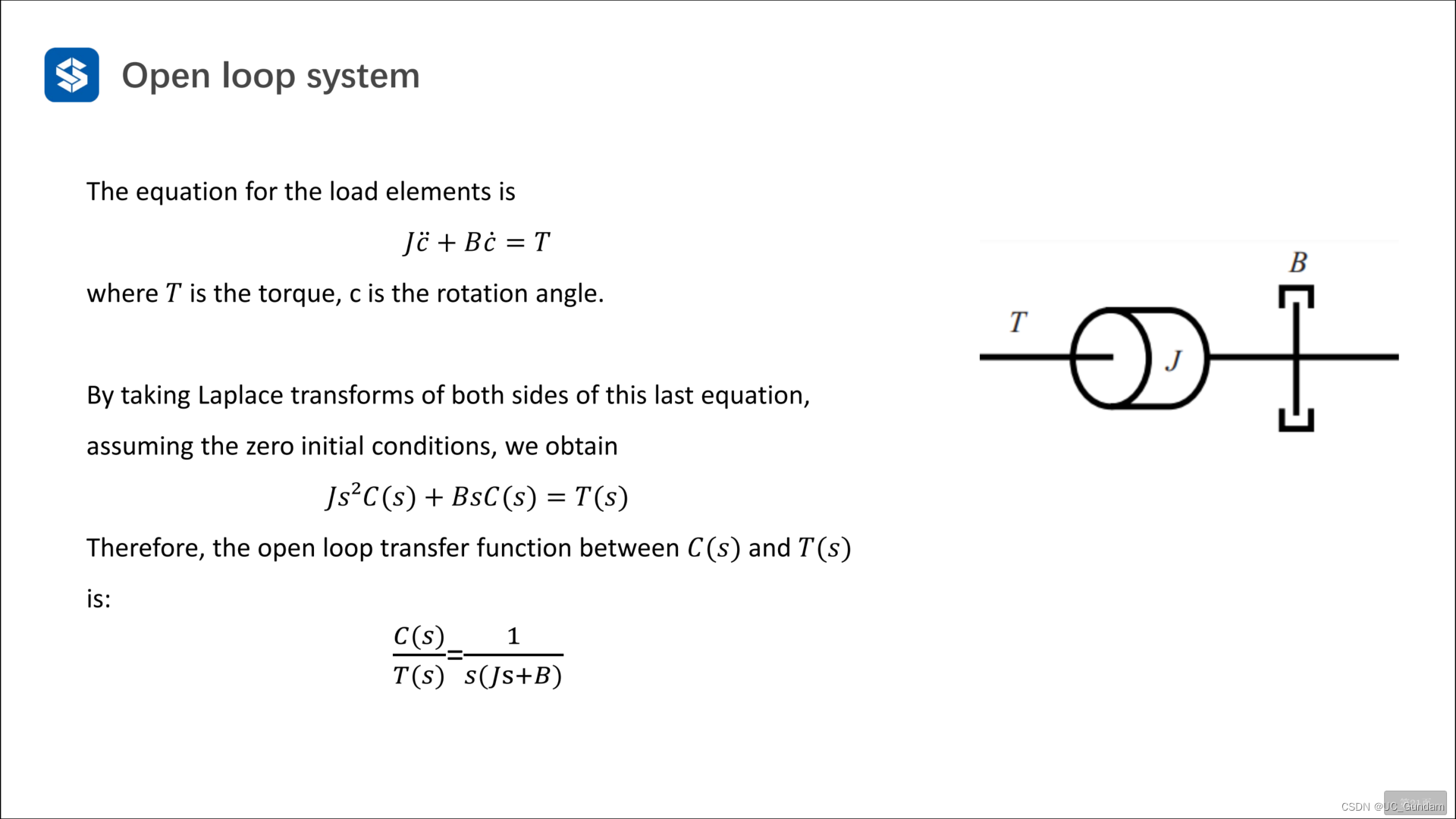
开环系统模型
闭环系统模型

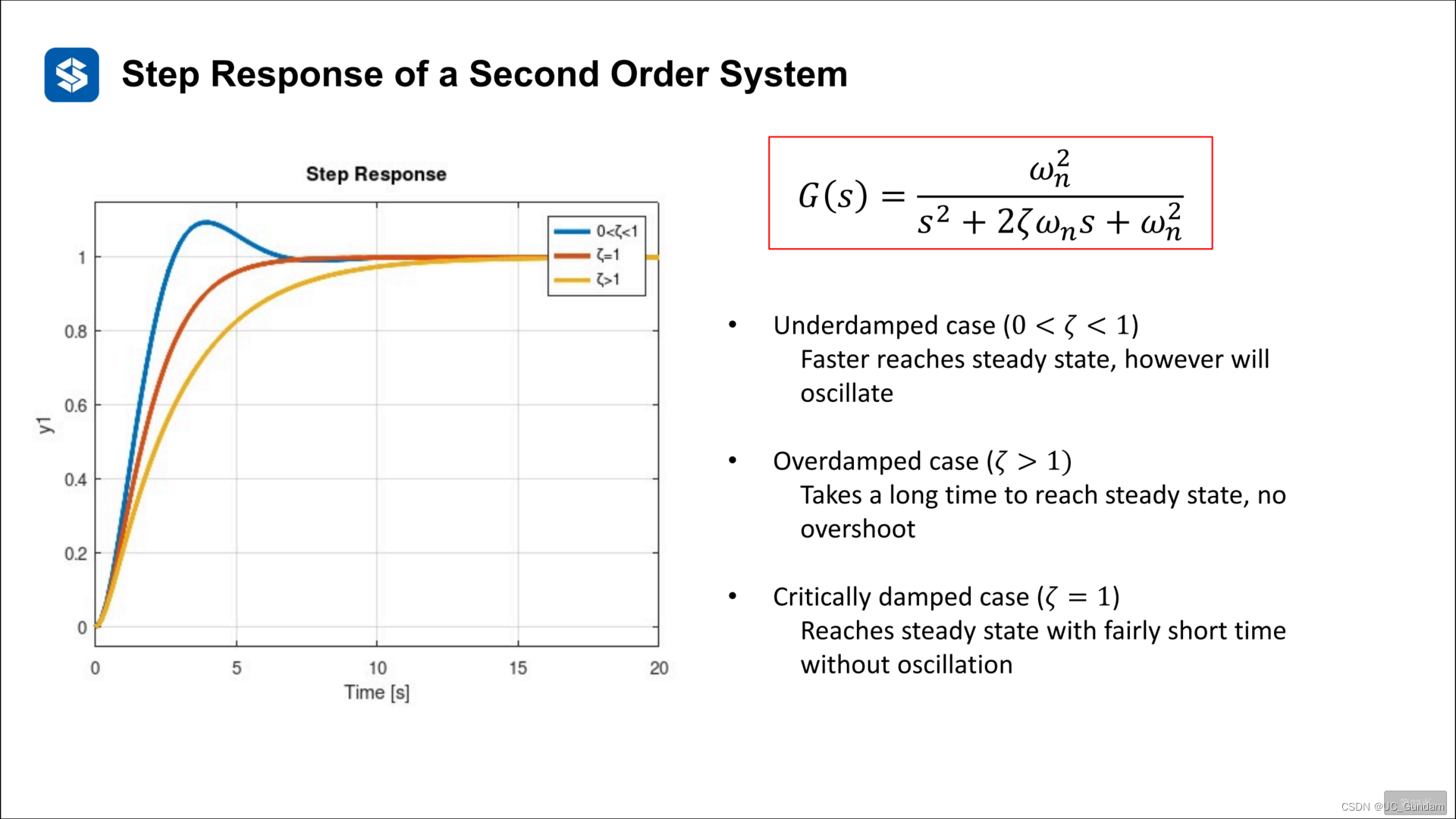
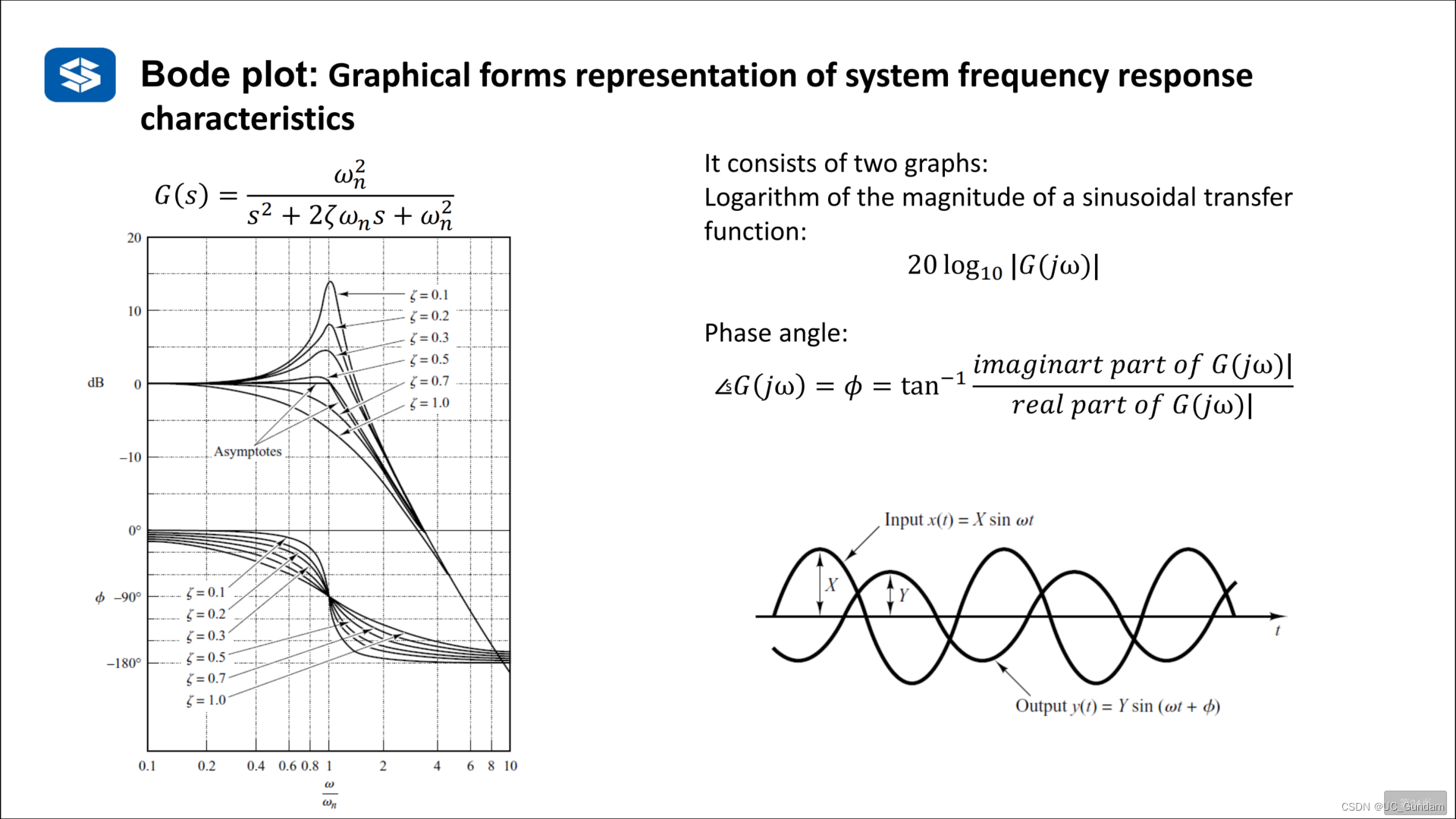
二阶系统的阶跃响应,(欠阻尼系统,过阻尼系统,理想系统)
对于允许振荡的系统,一般使用欠阻尼系统(0.7左右),从而更快实现控制效果。
对于不允许振荡的系统,一般采用过阻尼或者理想系统。
伯德图,常用于系统频域分析
2.2 PID控制

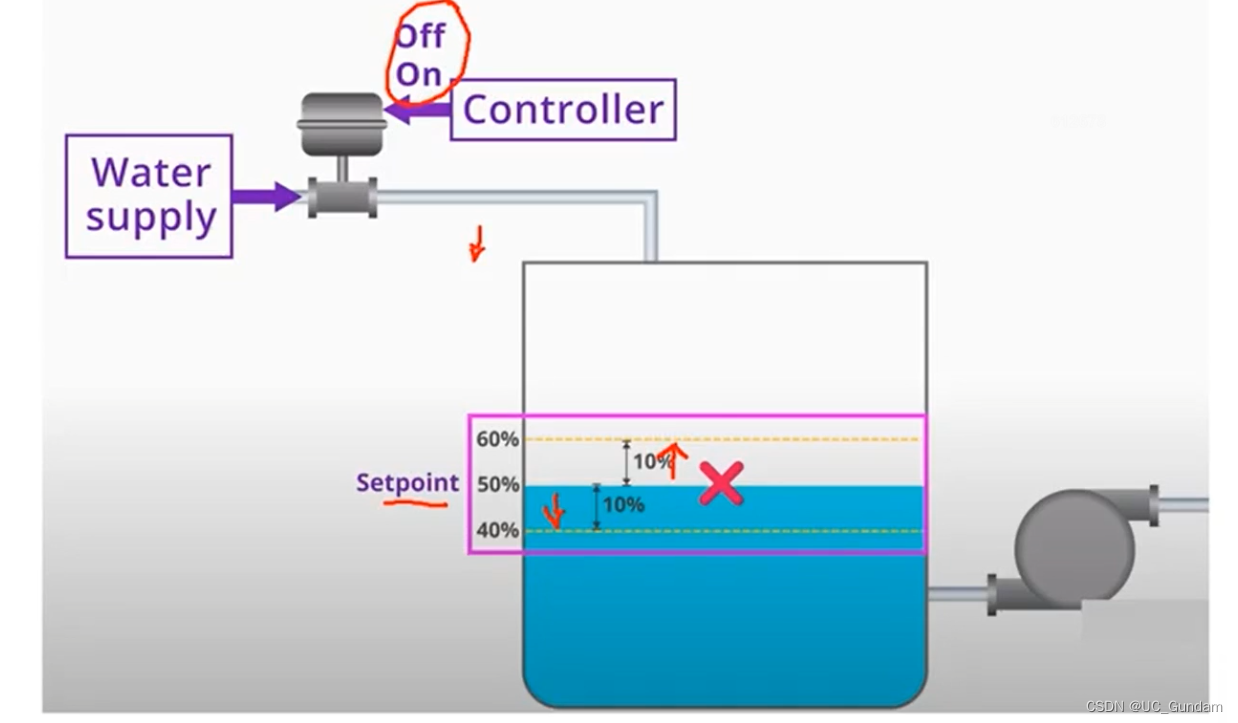
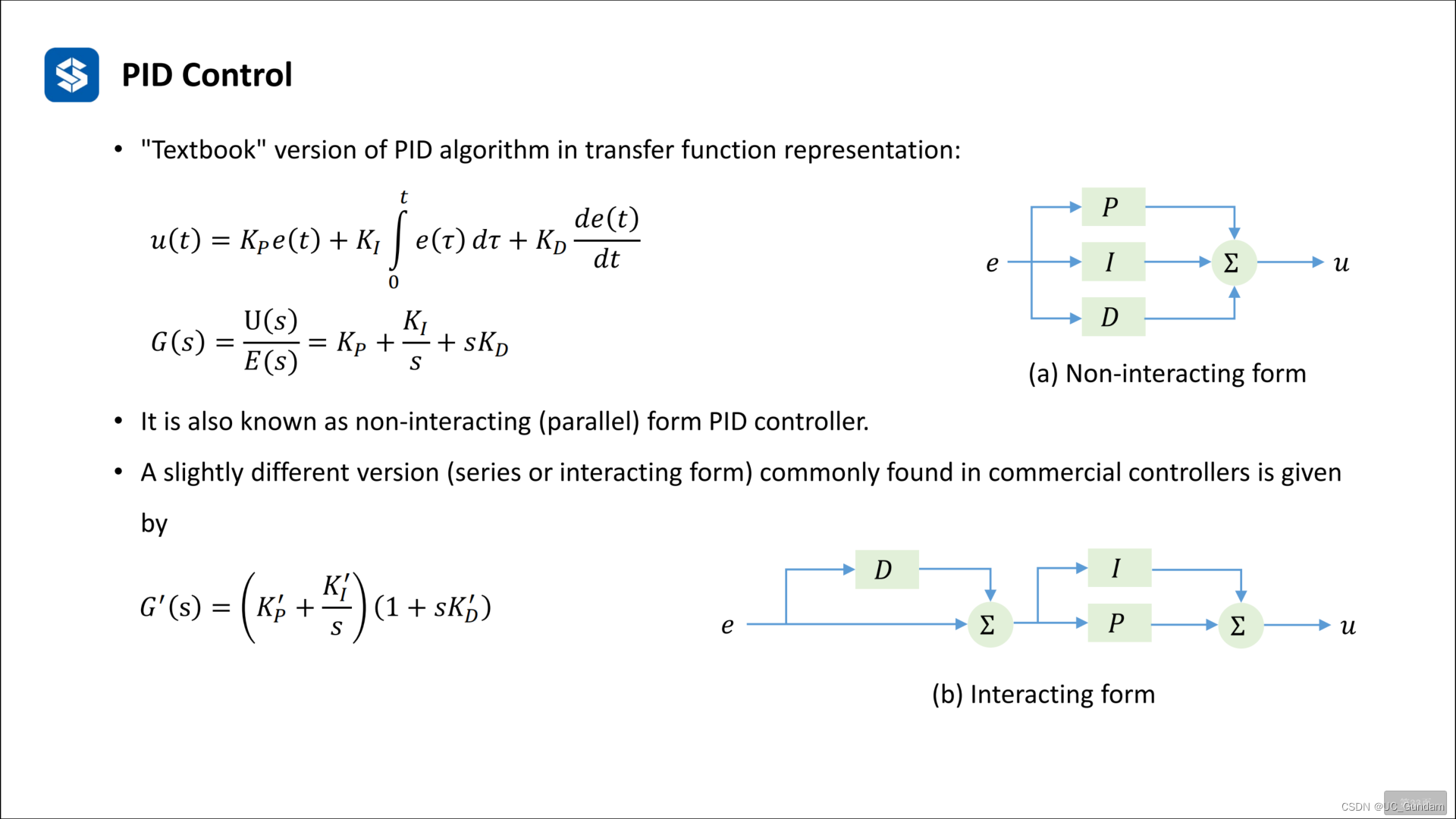
PID系统结构(比例、积分、微分)
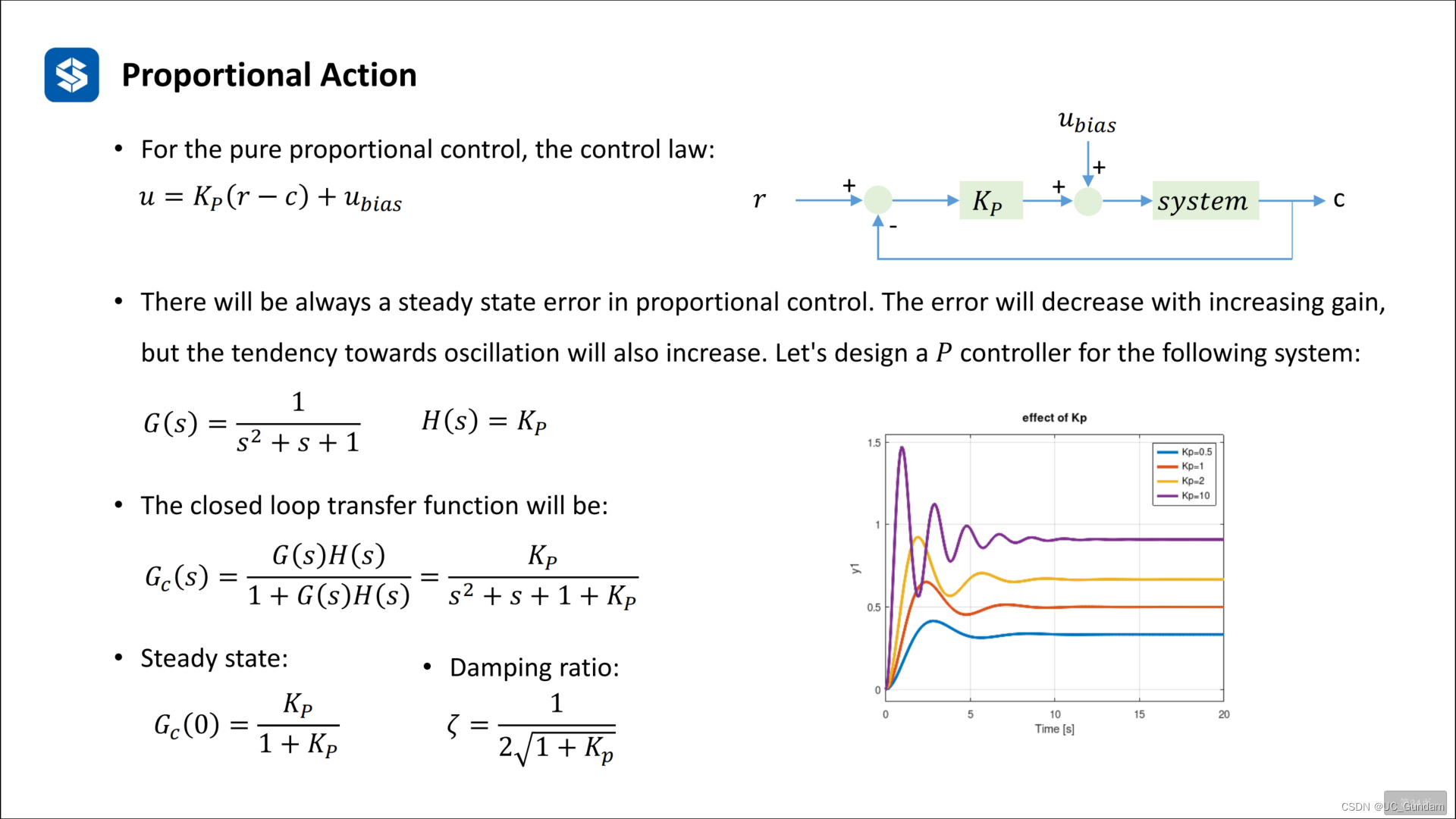
比例:提升速度
积分:提升精度,影响速度
微分:提升稳态误差,影响速度
对系统的串联矫正
比例控制器(仅有Kp),振荡越来越大
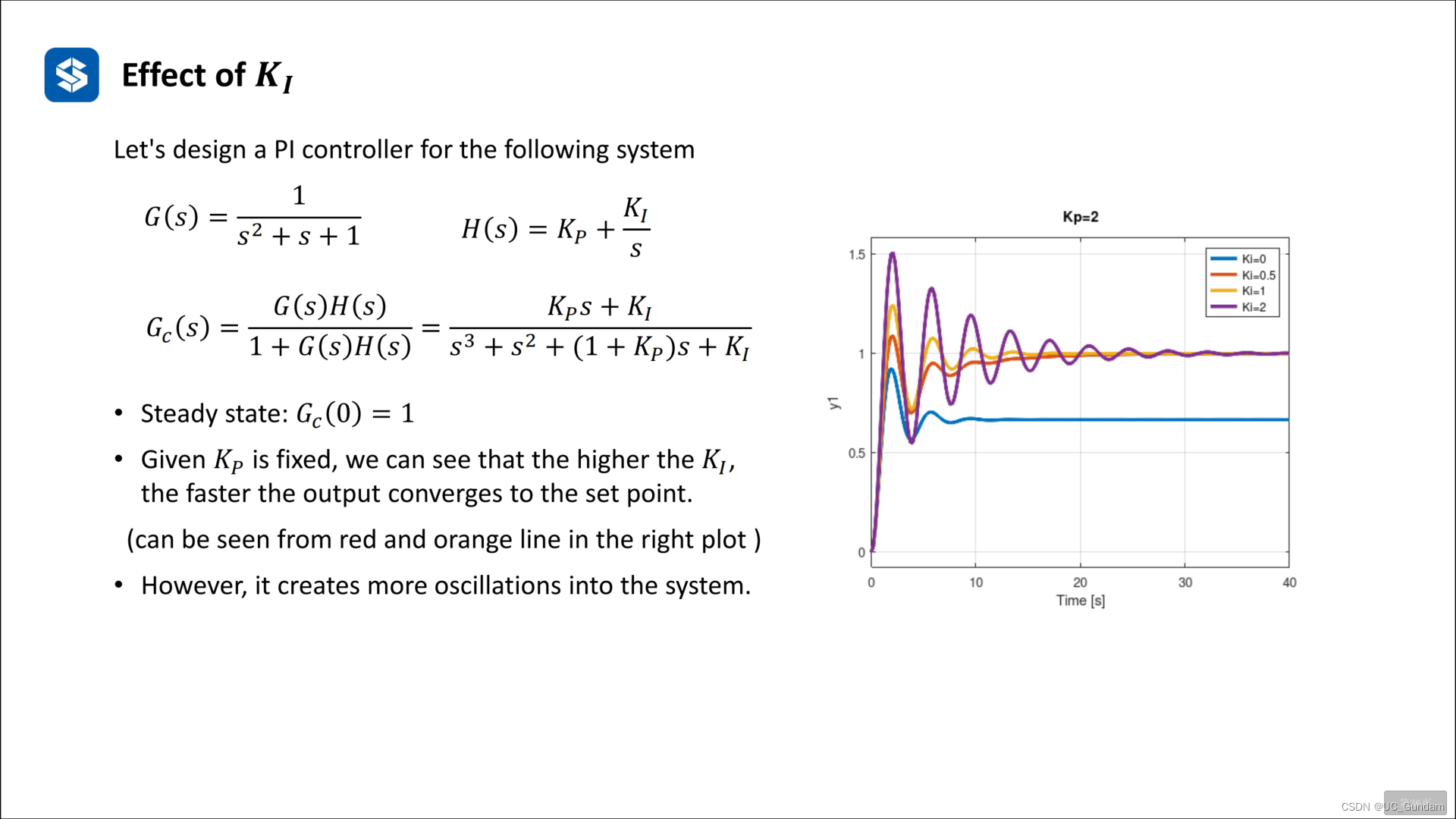
积分控制(PI控制)

Ki变大,振荡越来越大,稳态误差趋近于0
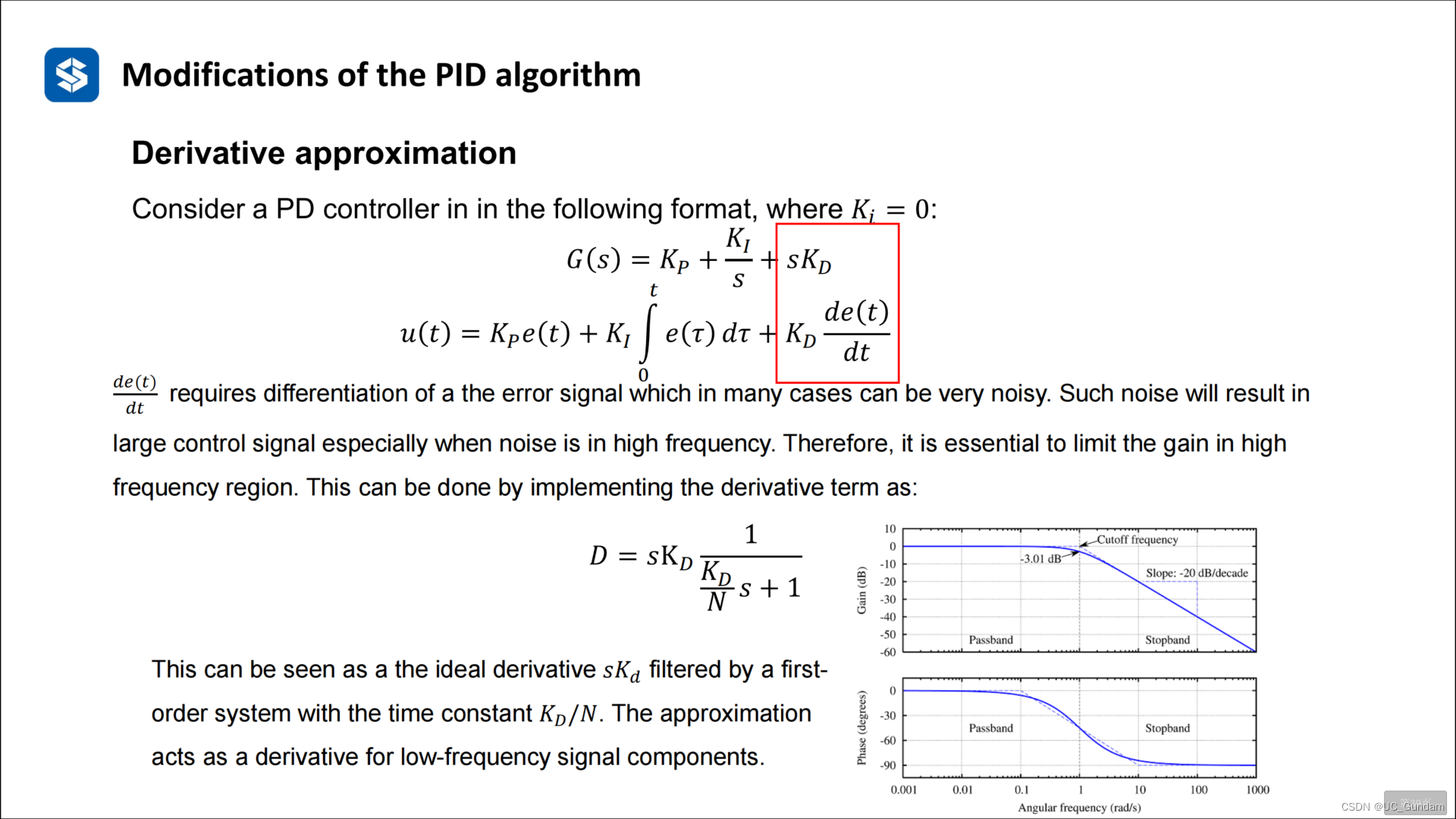
微分控制(稳定系统的作用)
减少振荡,不改变稳定值,影响速度。对稳态误差要求高时必须引入。

PID控制
PID的控制过程表述:
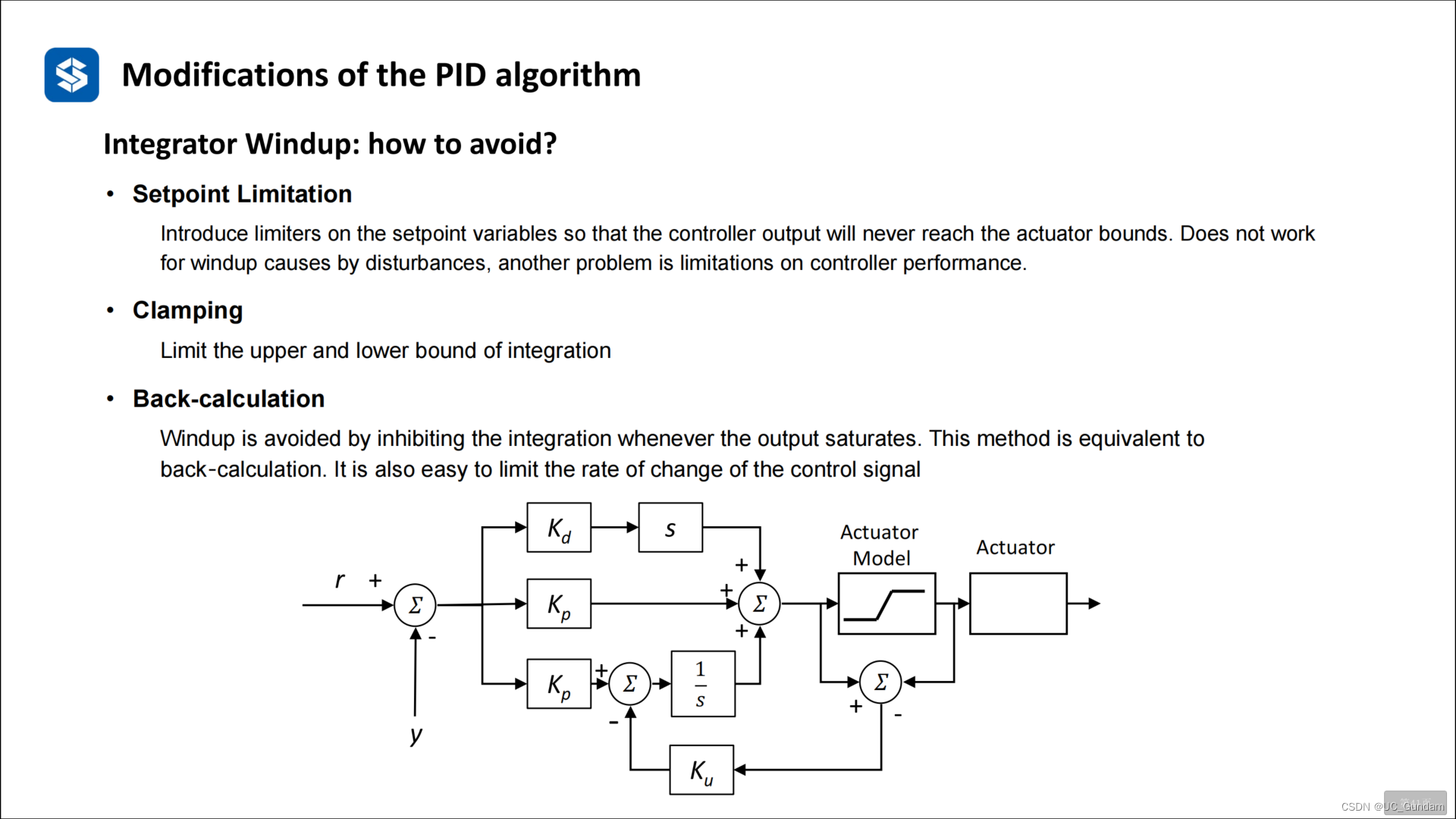
积分饱和现象
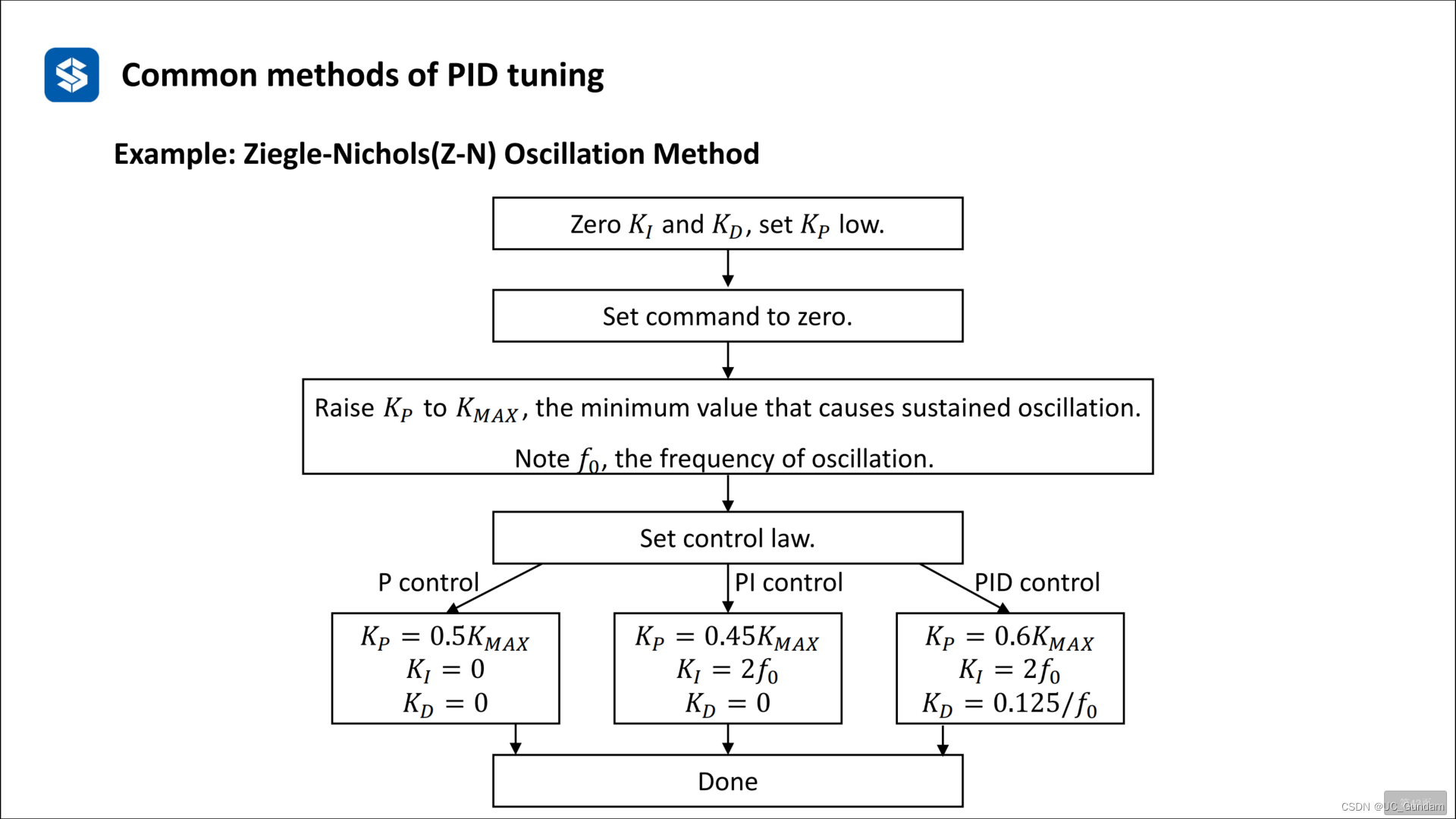
PID控制器的调参方法(Z-N方法,振荡方法)
核心思想:1/4衰减,以经验为主
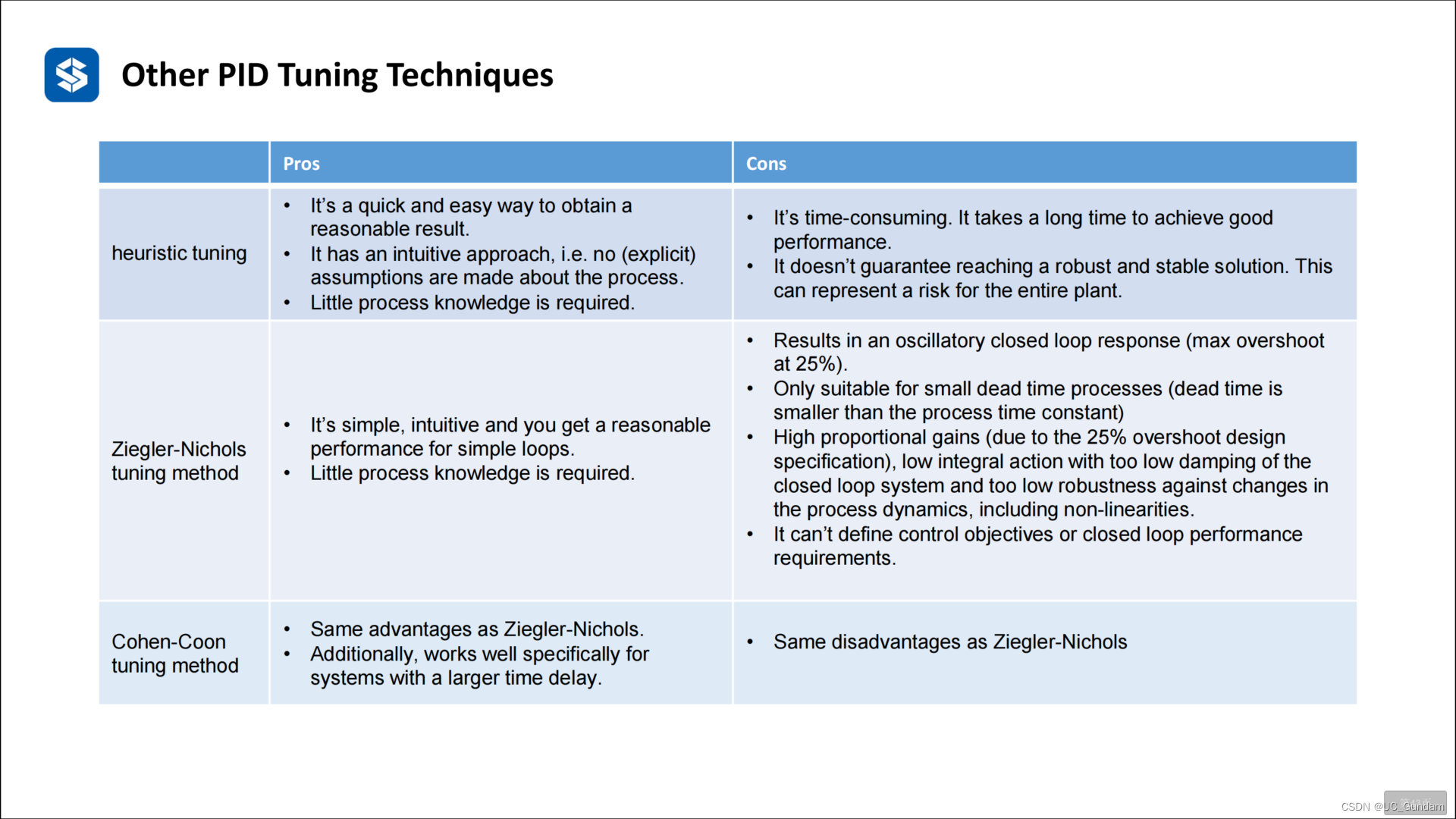
调参方法比较(试错法、基于规则的方法、更加系统化的方法)

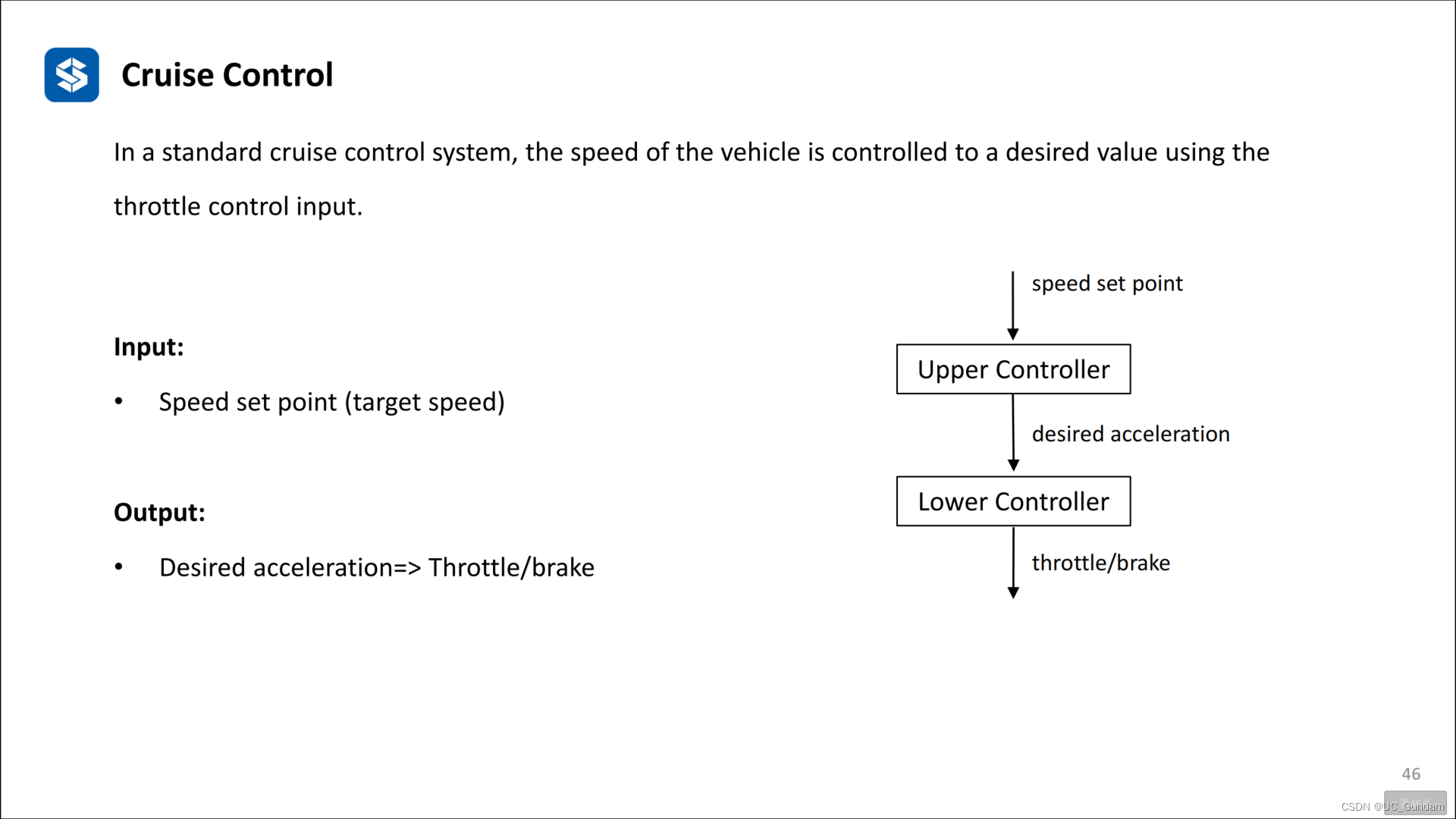
2.3 巡航控制

巡航控制的基本任务:控制车速达到目标车速
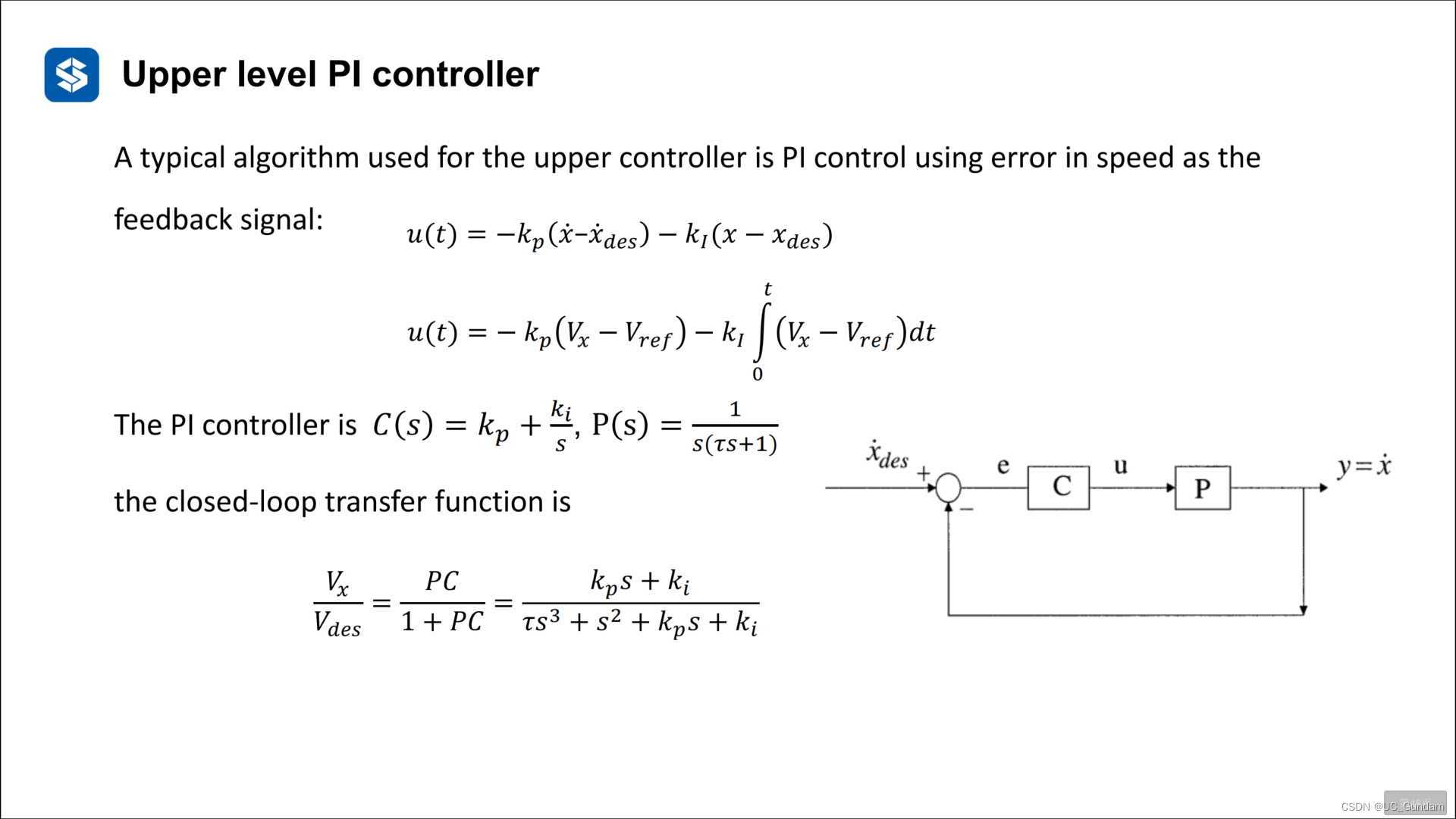
上层控制器:PI控制,用一个一阶系统模拟实际加速度的变化过程
目标速度与目标加速度的关系
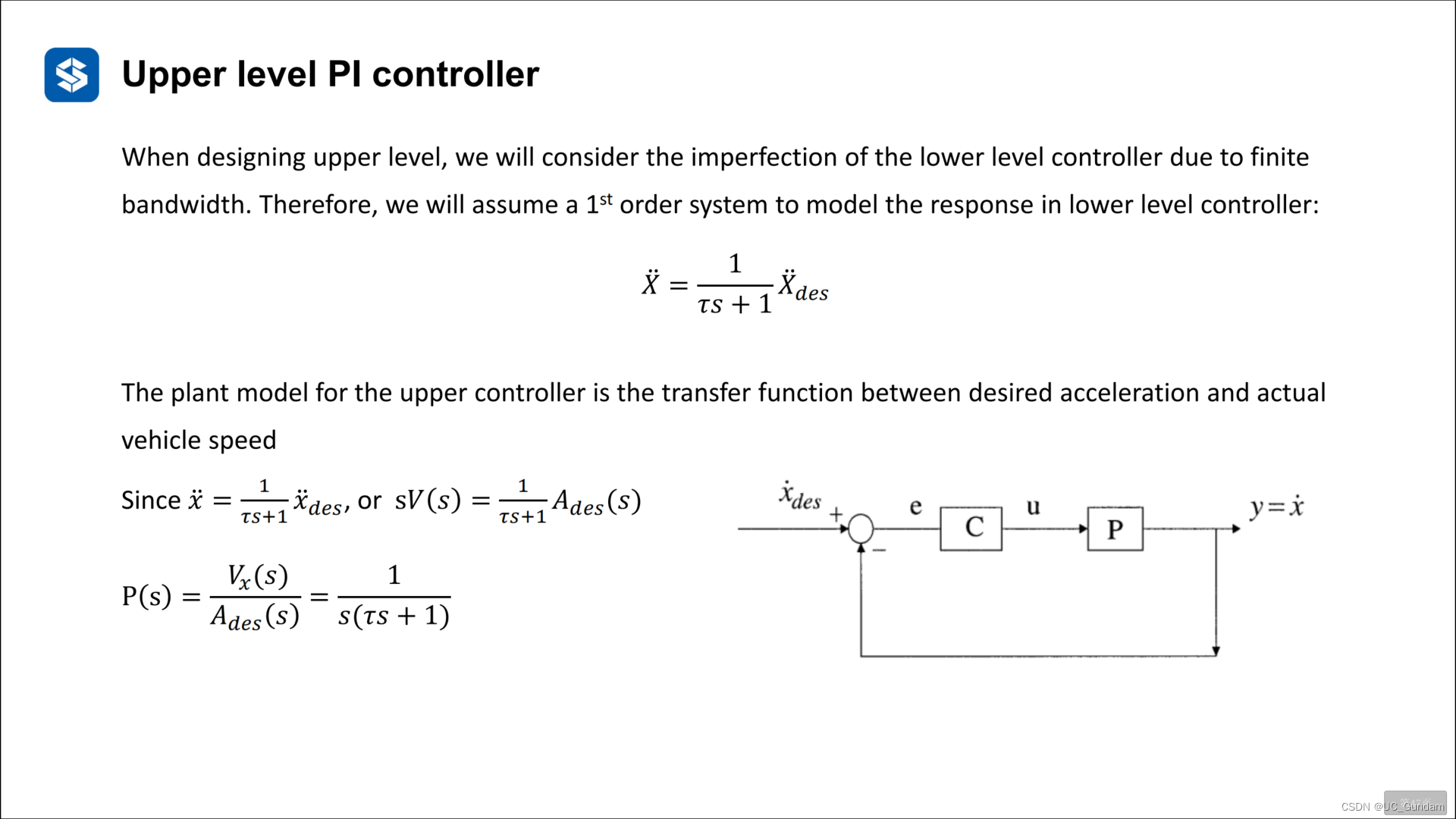
时域方程
下层控制:如何根据目标加速度控制油门踏板和刹车踏板的开度
(1)油门标度法
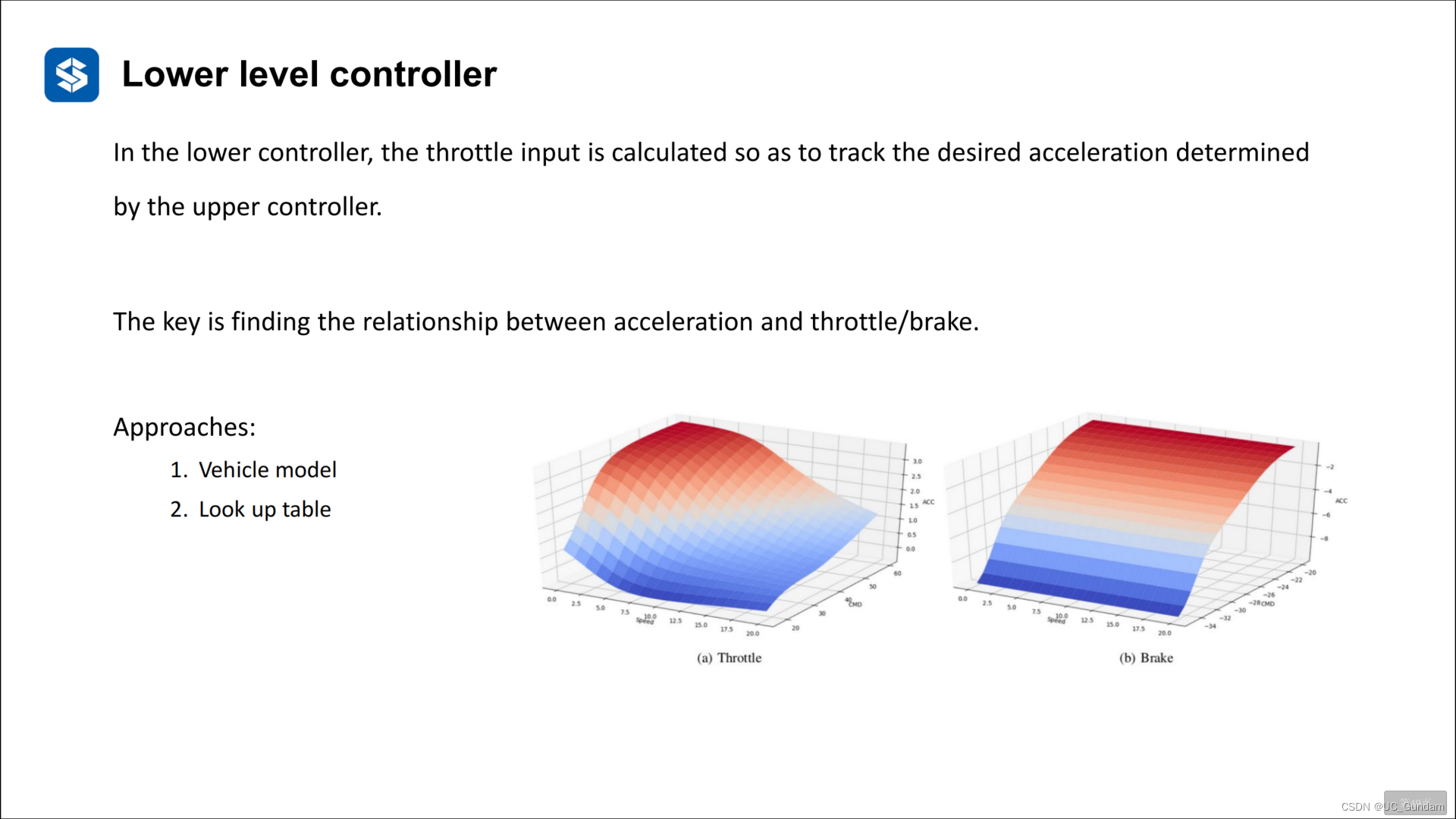
(2)根据车辆模型控制
推导油门开度与加速度(纵向力)的方程


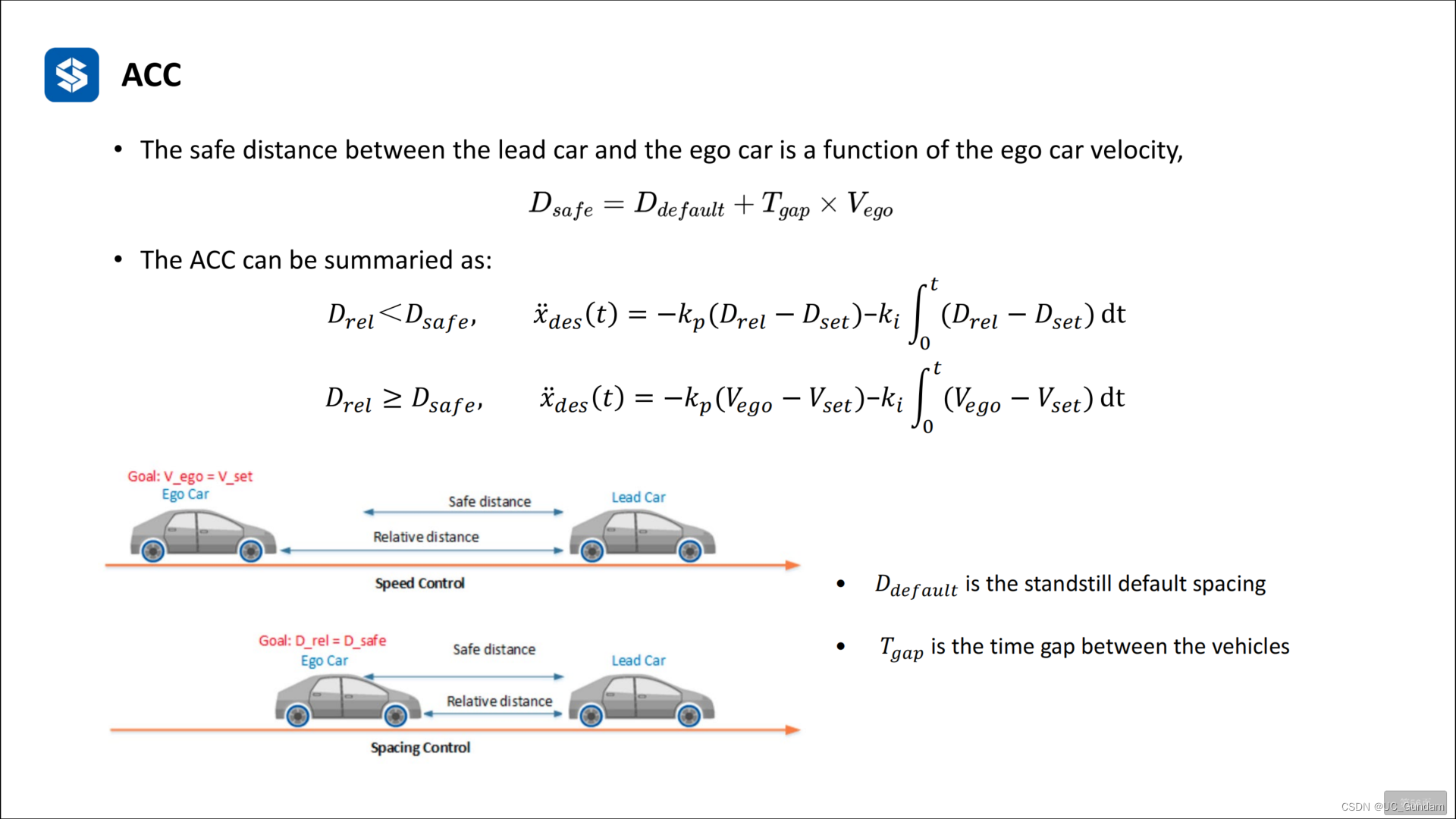
2.4 自适应巡航(ACC)
ACC能根据环境变化(相对距离与相对速度)调整车速
输入:驾驶员设定速度、自身速度、与前车的相对距离和相对速度、时间间隔
输出:加速度(油门、刹车)
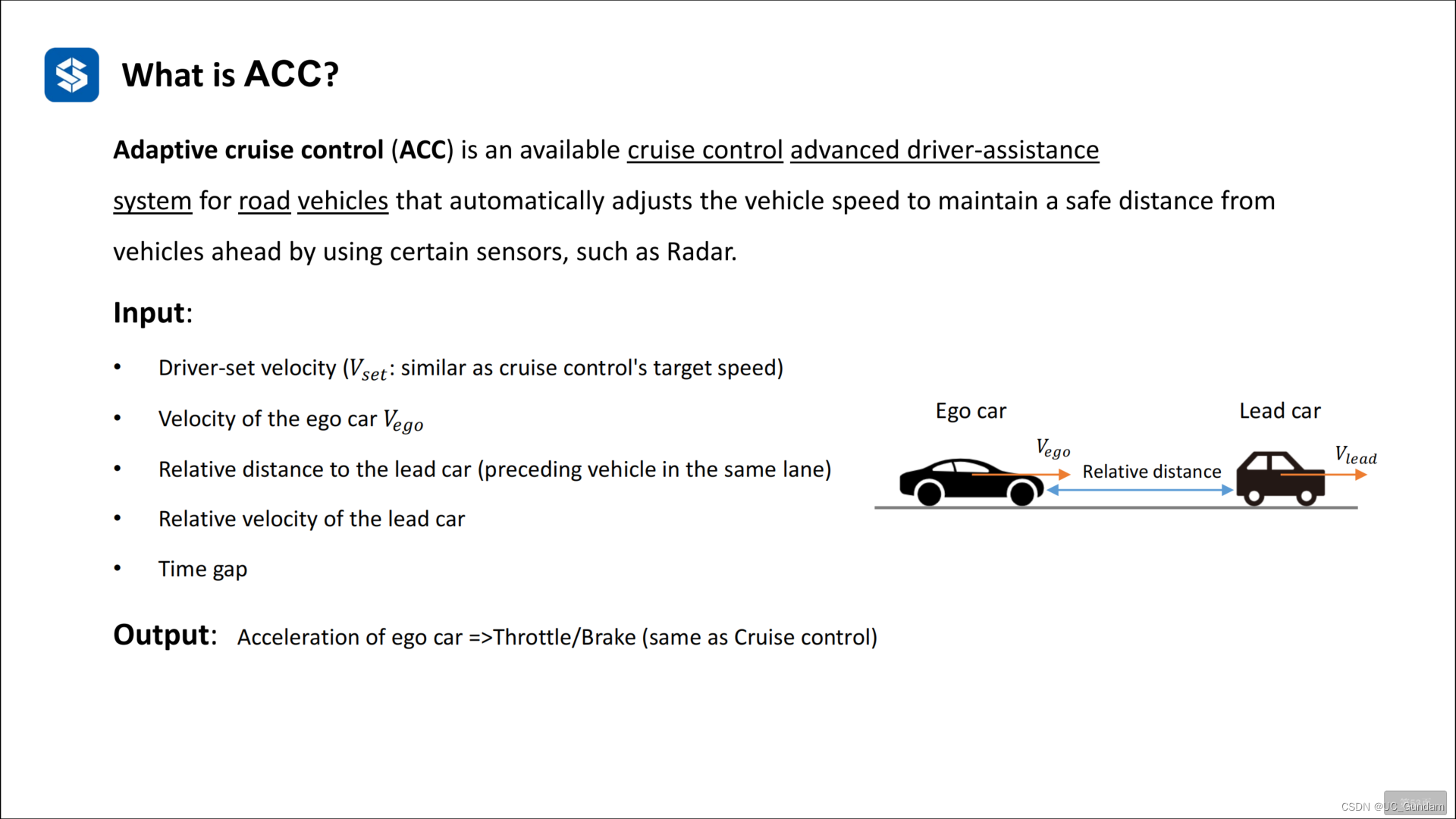
两种工作模式:定速控制模式、跟车模式
固定时间间隔的重要性:使得跟车距离与相对车速满足一定关系

ACC的工作模式