本文转自微信公众号:Apollo开发者社区
原创: 阿波君 Apollo开发者社区 9月26日


上周我们发布了无人驾驶技术的规划篇,车辆基于高精地图,感知和预测模块的数据来进行这一规划。
本期我们将介绍和控制相关的知识,具体讲解最常用的控制算法---------PID控制器。自动驾驶的入门课程已经接近尾声,开发者学习的热情依然高涨。希望开发者们在完成入门课程后,继续深入学习无人驾驶技术,在无人驾驶领域越走越远。

视频连接为:https://v.qq.com/x/page/u0719ta7ad7.html
1、简介
控制是驱使车辆前行的策略。对于汽车而言,最基本的控制输入为转向、加速和制动。通常,控制器使用一系列路径点来接收轨迹。控制器的任务是使用控制输入让车辆通过这些路径点。
首先,控制器必须准确,这意味着它应避免偏离目标轨迹。这对于安全来说,尤为重要。即使路面潮湿或者道路比较陡峭,控制器仍需要准确地执行轨迹。其次,控制策略对汽车应该具备可行性。例如,如果你的汽车向北行驶,而你希望它立即向东转。你可以在游戏中做到这一点,但在现实中无法实现。最后,需要考虑的是平稳度。舒适的驾驶非常重要。如果车辆行驶得不规律,那乘客永远不会想再次乘坐它了。要使控制顺利进行,驱动必须是连续的。这意味着你应避免突然转向、加速或制动。
总之,我们的目标是使用可行的控制输入,最大限度地降低与目标轨迹的偏差、最大限度地提供乘客的舒适度。有三种可用于实现这些目标的控制策略:比例积分微分控制(或PID)、线性二次调节器(或LQR)、模型预测控制(或MPC)。
2、控制流程
控制器预计有两种输入:目标轨迹与车辆状态。目标轨迹来自规划模块,在每个轨迹点,规划模块指定一个位置和参考速度。在每个时间戳都对轨迹进行更新。我们还需要了解车辆状态,车辆状态包括:通过本地模块来计算的车辆位置、从车辆内部传感器获取的数据(如速度、转向和加速度)。我们使用这两个输入来计算目标轨迹与实际行进轨迹之间的偏差。
控制器的输出是控制输入(转向、加速和制动)的值。当偏离目标轨迹时,我们希望采取行动来纠正这种偏差。对于普通汽车,我们使用方向盘控制行驶方向(即转向)、使用油门加速、使用刹车减速(即制动)。这也是无人驾驶汽车所做的。一旦将这三个值传递给车辆,汽车实际上已经开始无人驾驶了。之后将介绍不同的控制算法,如何计算这三个输出:转向、加速和制动。
3、PID控制
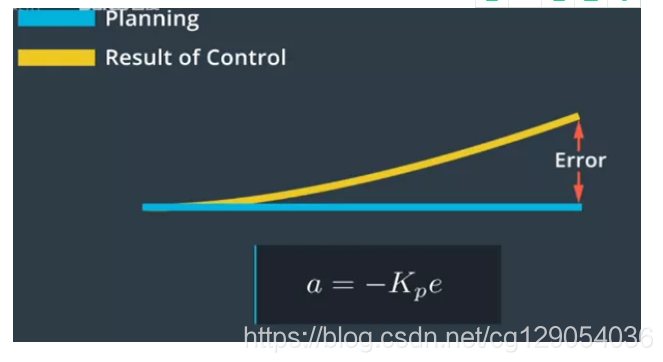
首先介绍的算法为PID控制,这个控制器的优点在于它非常简单,只需要知道与目标轨迹有多大的偏离。PID的第一组件为P代表“比例”(Proportional)。设想一辆车正试图遵循目标轨迹,P控制器在车辆开始偏离时立即将其拉回目标轨迹。比例控制意味着,车辆偏离越远,控制器越难将其拉回目标轨迹。
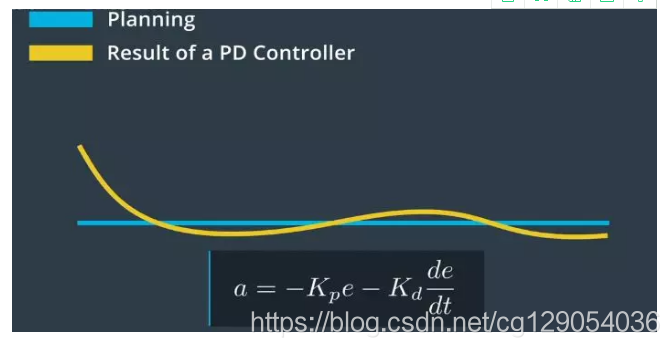
在实践中P控制器的一个问题在于,它很容易超出参考轨迹。当车辆越来越接近目标轨迹时,我们需要控制器更加稳定。PID控制器中的D项致力于使运动处于稳定状态,D代表“微分”(Derivative)。PD控制器类似于P控制器,它增加了一个阻尼项,可最大限度地减少控制器输出的变化速度。
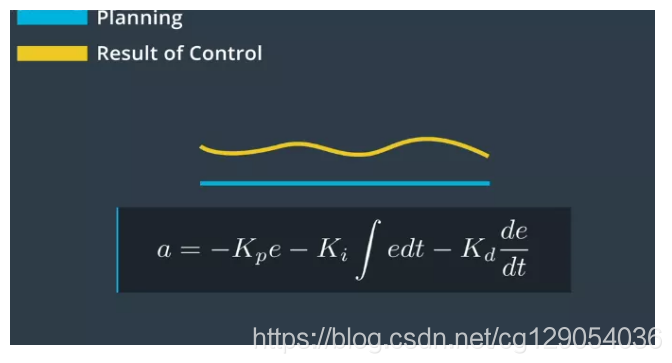
PID控制器中的最后一项I代表积分(Integral),该项负责纠正车辆的任何系统性偏差。例如,转向可能失准,这可能造成恒定的转向偏移。在这种情况下,我们需要稍微向一侧转向以保持直行。为解决这一问题,控制器会对系统的累积误差进行惩罚。我们可以将P、I和D组件结合构成PID控制器。
4、PID优劣对比
PID控制器很简单,但它在很多情况下的效果很好。对于PID控制器,你只需要知道你的车辆与目标轨迹之间的偏差。但是PID控制器只是一种线性算法,对于非常复杂的系统而言,这是不够的。例如,为控制具有多个关节的四轴飞行器或机器人,我们需要建立机器人的物理模型。对无人驾驶而言,我们需要应用不同的PID控制器来控制转向和加速,这意味着很难将横向和纵向控制结合起来。另一个问题在于PID控制器依赖于实时误差测量,这意味着受到测量延迟限制时可能会失效。
更多详细课程内容,大家可以登陆官网继续学习!
也可以添加社区小助手(Apollodev)为好友,回复“课程学习”进群与其他开发者共同交流学习。

自课程上线以来,浏览量已超10万,已帮助全球97个国家约 7000 名学员入门自动驾驶与 Apollo 开源平台,其中37%为海外学员,本门课程已成为优达学城 (Udacity) 近期获得关注度最高的免费课程之一。