ORB_SLAM2 填坑(更新中)
1、
解决方法:
sudo rm /var/cache/apt/archives/lock
sudo rm /var/lib/dpkg/lock
2、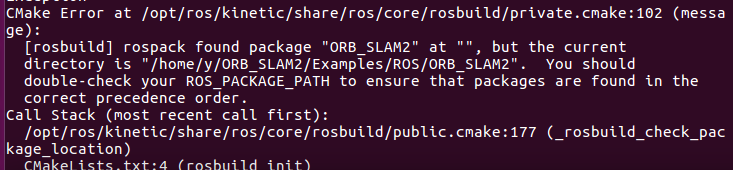
在home界面下ctrl+h打开隐藏文件的,bashrc文件,作如下更改:在最后一行添加
export ROS_PACKAGE_PATH=${
ROS_PACKAGE_PATH}:/home/自己的用户名/ORB_SLAM2/Examples/ROS/ORB_SLAM2
终端输入:source ~/.bashrc 使环境生效
3、若在执行./build.sh时出现卡机现象
打开build.sh文件将最后的make -j改为make
4、编译pangolin时的错误
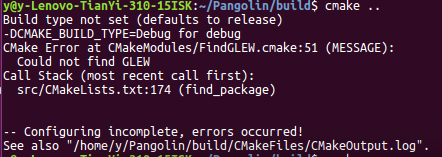
sudo apt-get install libsqlite3-dev libglew*-dev libssl-dev libgl2ps-dev libxi-dev g++ libzip-dev
5、./build_ros.sh时出错

将/usr/lib/x86_64-linux-gnu/目录下的
libboost_system.so、libboost_system.so.1.58.0与libboost_filesystem.so、libboost_filesystem.so.1.58.0复制到ORBSLAM2/Examples/ROS/ORBSLAM2/lib下,并且将ORBSLAM2/Examples/ROS/ORBSLAM2下的Cmakelists.txt中加入库目录,具体为
在
set(LIBS
${
OpenCV_LIBS}
${
EIGEN3_LIBS}
${
Pangolin_LIBRARIES}
${
PROJECT_SOURCE_DIR}/../../../Thirdparty/DBoW2/lib/libDBoW2.so
${
PROJECT_SOURCE_DIR}/../../../Thirdparty/g2o/lib/libg2o.so
${
PROJECT_SOURCE_DIR}/../../../lib/libORB_SLAM2.so
之后加入
${
PROJECT_SOURCE_DIR}/lib/libboost_filesystem.so
${
PROJECT_SOURCE_DIR}/lib/libboost_system.so
问题得以解决
原文链接:https://blog.csdn.net/sinat_38343378/article/details/78883919