各位好,好久不见。我终于忙完论文和答辩啦。
今天我们来实现长期趋势的多维度时间序列预测
同时会提供一个完整的预测流程以及相关的评价指标,用于评价预测精确度。
算法来源于一篇经典的论文LSTNet,相关的介绍可以见 LSTNet详解-知乎
开源代码来源于 LSTNet_keras ,做了替换数据集和简化处理。’
LSTNet是一个专门为多变量时间序列预测所建立的模型,在交通流量,电力消耗和汇率等数据上进行了实验,取得了不错的结果。发表于2018年的ACM SIGIR会议上。
数据介绍
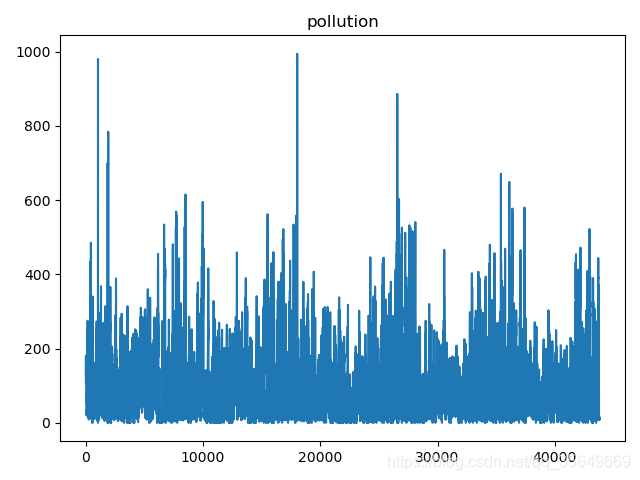
该数据集是一个污染数据集,我们需要用该多维时间序列去预测pollution这个维度,采用80%作为训练集,20%作为测试集。
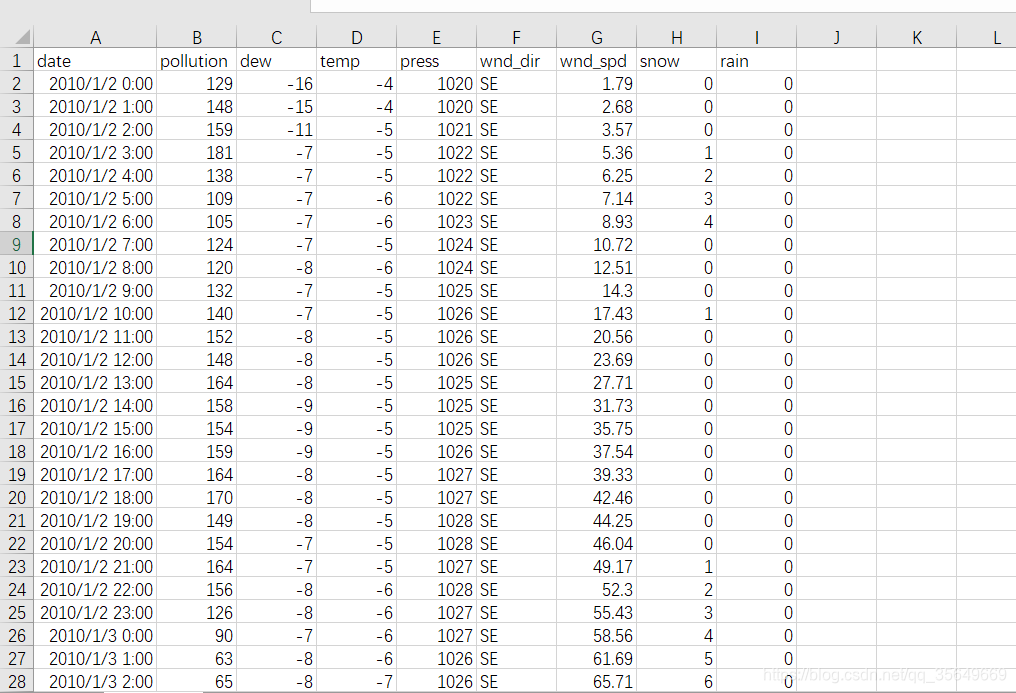
pollution数据趋势如下:
模型介绍
LSTNet的网络结构如图所示

我们可以看到使用了一个卷积层 两层循环神经网络(论文中使用了RNN或GRU,本文中使用了LSTM),可以看到第二层图上实现了一个称为"跳过层"的结构,用于实现对于非常长期趋势的记忆。但是其实是进行了数据变换而非LSTM结构的更改。
对于跳过层,例如输入数据[1,2,3,4,5,6,7,8,9,10,11,12],会进行一系列的数据变换变换为
[[1,7] , [2,8] , [3,9] , [4,10] , [5,11] , [6,12]],然后输入到LSTM之中,实现对于长期趋势的记忆。之后综合两层LSTM的结果,输入到全连接层之中。
对于Autogressive,是使用了全连接层模拟的自回归机制,会截取进几个时间步的数据,输入到全连接层的机制。得到结果。论文中称为"为模型添加了线性成分",实际在预测某些峰值时有很好的效果。
模型实现
对于原模型而言 对于第二个跳过层的实现需要大量的数据切片,会非常耗时
但是本文参考了LSTNet_keras 将输入分解为(1)短期时间序列,如(t-3, t-2, t-1, t)和(2)长期跳跃时间序列,如(t-2xskip, t-skip, t)。结果和原来的一样好,但是快得多。
数据构造
数据构造采用了如下的代码,具体如何使用见文末的github源代码
def create_dataset(dataset, look_back,skip):
'''
对数据进行处理
'''
dataX,dataX2,dataY = [],[],[]
#len(dataset)-1 不必要 但是可以避免某些状况下的bug
for i in range(look_back*skip,len(dataset)-1):
dataX.append(dataset[(i-look_back):i,:])
dataY.append(dataset[i, :])
temp=[]
for j in range(i-look_back*skip,i,skip):
temp.append(dataset[j,:])
dataX2.append(temp)
TrainX = np.array(dataX)
TrainX2 = np.array(dataX2)
TrainY = np.array(dataY)
return TrainX, TrainX2 , TrainY
模型代码
对于初始的LSTNet而言,只使用单个一维卷积对于数据进行处理,之后再进行数据变换。但是对于本简化版而言,在构造数据时进行了数据变换。所以需要两个一维卷积,然后对他们赋予了相同的权重。
模型中的z指的是AR模型的实现
def LSTNet(trainX1,trainX2,trainY,config):
input1 = Input(shape=(trainX1.shape[1], trainX1.shape[2]))
conv1 = Conv1D(filters=48, kernel_size=6, strides=1, activation='relu') # for input1
# It's a probelm that I can't find any way to use the same Conv1D layer to train the two inputs,
conv2 = Conv1D(filters=48, kernel_size=6 , strides=1, activation='relu') # for input2
conv2.set_weights(conv1.get_weights()) # at least use same weight
conv1out = conv1(input1)
lstm1out = CuDNNLSTM(64)(conv1out)
lstm1out = Dropout(config.dropout)(lstm1out)
input2 = Input(shape=(trainX2.shape[1], trainX2.shape[2]))
conv2out = conv2(input2)
lstm2out = CuDNNLSTM(64)(conv2out)
lstm2out = Dropout(config.dropout)(lstm2out)
lstm_out = concatenate([lstm1out,lstm2out])
output = Dense(trainY.shape[1])(lstm_out)
#highway 使用Dense模拟AR自回归过程,为预测添加线性成份,同时使输出可以响应输入的尺度变化。
highway_window = config.highway_window
#截取近3个窗口的时间维 保留了所有的输入维度
z = Lambda(lambda k: k[:, -highway_window:, :])(input1)
z = Lambda(lambda k: K.permute_dimensions(k, (0, 2, 1)))(z)
z = Lambda(lambda k: K.reshape(k, (-1, highway_window*trainX1.shape[2])))(z)
z = Dense(trainY.shape[1])(z)
output = add([output,z])
output = Activation('sigmoid')(output)
model = Model(inputs=[input1,input2], outputs=output)
return model
模型结构如图,
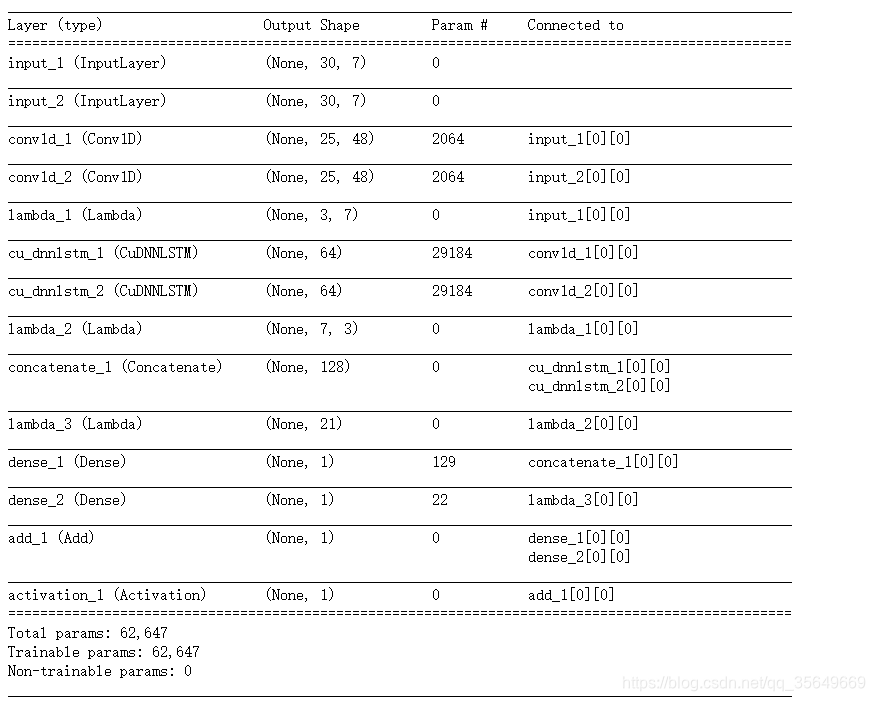
进行预测
我们选取前80%的数据进行训练,后20%的数据进行预测,预测下一时刻的pollution数据。
data = pd.read_csv("./pollution.csv")
#注:为了演示方便故不使用wnd_dir,其实可以通过代码将其转换为数字序列
data = data.drop(['wnd_dir'], axis = 1)
data = data.iloc[:int(0.8*data.shape[0]),:]
print("长度为",data.shape[0])
评价指标
选取的评价指标为RMSE,MAE,MAPE

import numpy as np
from sklearn import metrics
def GetRMSE(y_hat,y_test):
sum = np.sqrt(metrics.mean_squared_error(y_test, y_hat))
return sum
def GetMAE(y_hat,y_test):
sum = metrics.mean_absolute_error(y_test, y_hat)
return sum
def GetMAPE(y_hat,y_test):
sum = np.mean(np.abs((y_hat - y_test) / y_test)) * 100
return sum
预测结果:
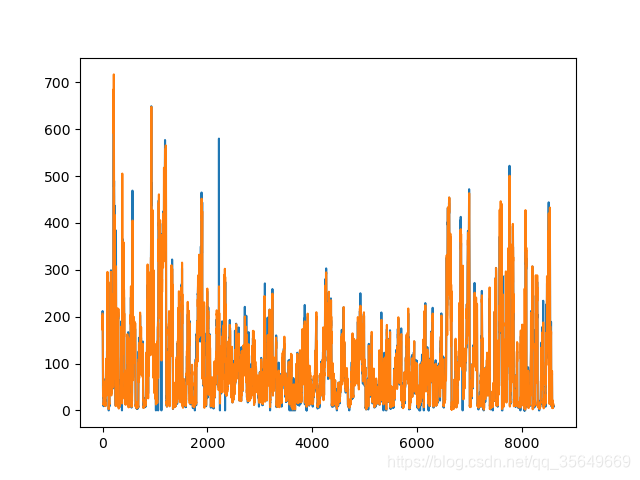
由于y_test有为0的元素,所以我们将其删除再求MAPE
得到结果如下:
RMSE为 26.184022062997542
MAE为 13.882745963353731
MAPE为 22.928112428670353
总结
在本博客中,提供了一套完整的建模-预测-评价方法,是现成可用的
实现了一种对于长期趋势记忆的方法
预测精度仍然有进步空间(有许多原因,笔者在大量数据上使用该方法预测效果很好)
注:
环境: Keras 2.2 & Tensorflow 1.13.1
代码已上传到我的github
如果觉得不错的话可以去github点个星星(看在我租服务器跑实验的份上)
参考:
LSTNet_keras
LSTNet