概述
作者提出了一种新的方法,使用该方法可以对交通需求管理政策的效果进行量化评估。该方法是一种不断迭代前进的仿真方法,从作者给的实例来看,仿真效果应该是相当不错,毕竟是一种具备物理含义的仿真方法,感觉能达到作者所提的效果是相当好了。接下来就来具体介绍下该方法。
方法论介绍
概念介绍
需要先介绍以下几个概念:
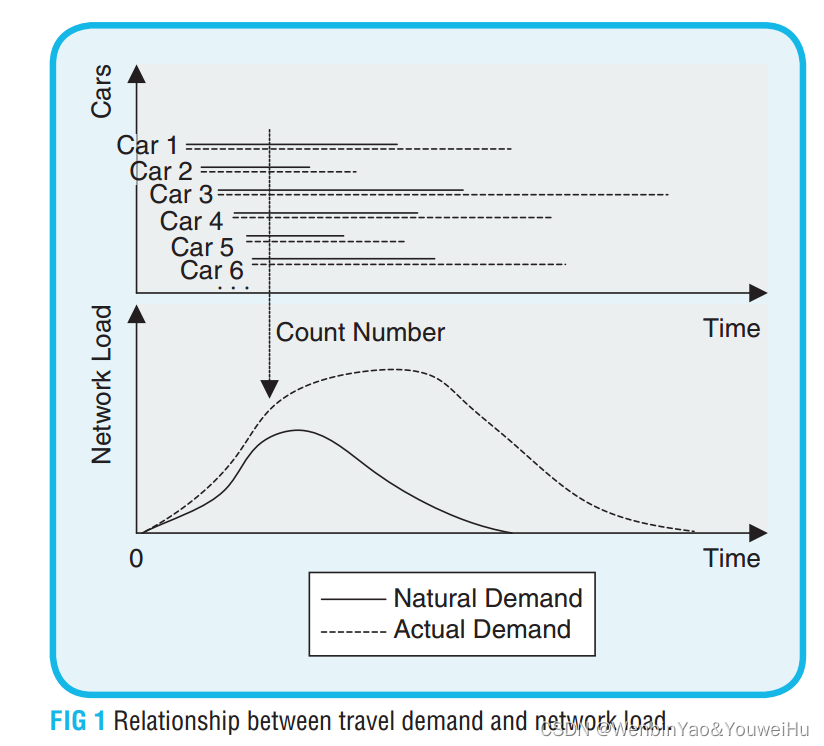
自然需求:一次出行的自由流出行时间,作者将需求的概念设定为出行时间,而不是我们常用的出行车辆数;
实际需求:一次出行的实际旅行时间;
剩余需求:对于在之前时刻未完成的出行,这些出行的剩余的自由流行程时间被称为剩余需求;
总需求:由该时刻的自然需求和之前时间剩余的需求组成;
网络载荷:当前网络中的出行总数;
下图很好的描述了自然需求、实际需求、网络载荷之间的关系,上半幅图中的实线是自然需求、虚线是实际需求,将同一个时刻的自然需求累加就是自由流下的载荷,虚线累加就是网络载荷。
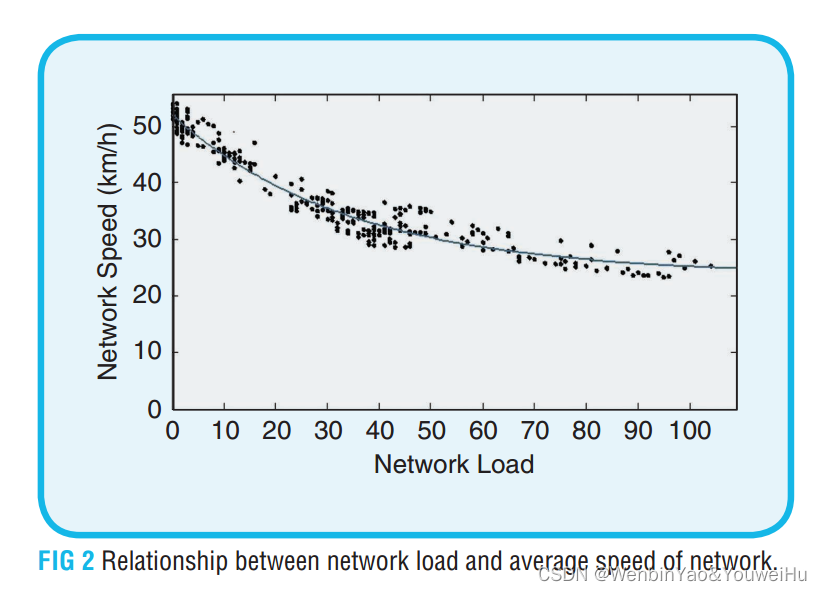
借助数据绘制出网络载荷和路网速度间的关系如下图2所示,其实这个就是类似于宏观基本图的思想了,但是和宏观基本图不同的是:1.概念上和mfd有一些区别;2.作者没有要求网络载荷需要是全样本,也可以是一个抽样的网络载荷,观察下图可以发现网络载荷最大也才100,但是整个网络显然不可能只有100辆车,这是因为作者使用的GPS数据,GPS数据可以视作是路网上全样本车辆的一个随机抽样。作者所希望构建是一个抽样样本的网络载荷和网络平均速度间的关系,该关系如式1所示,该式的具体函数形式可以自定,论文中作者是用了指数函数去拟合。
v = h ( r ) ( 1 ) v=h(r) \quad (1) v=h(r)(1)
h ( x ) = a e − b x + c h(x)=ae^{-bx}+c h(x)=ae−bx+c
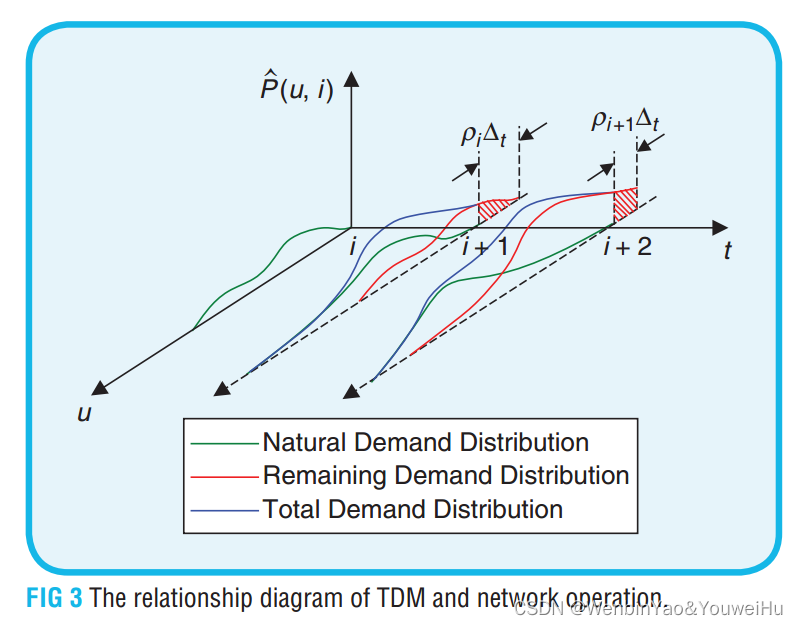
P ^ ( u , t ) \hat P(u,t) P^(u,t)代表所有出行关于u和t的分布,u是自然需求,t是出行的开始时间,这里需要注意的是 P ^ ( u , t ) \hat P(u,t) P^(u,t)并不是概率密度函数,可以认为是t时刻的出行总数N*概率密度函数f(u,t),也就是说 P ^ ( u , t ) \hat P(u,t) P^(u,t)的物理意义是某个时刻t某种自然需求u的车辆数,因此它是出行的分布,而不是出行的概率分布。因此 P ^ ( u , t ) d u d t \hat P(u,t)dudt P^(u,t)dudt得到的就是[t,t+dt]这个时刻[u,u+du]这个自然需求的车辆数。 为了后续处理,作者将时间做了离散化,取某个周期为一个时间单元,记作 P ^ ( u / i ) \hat P(u/i) P^(u/i),这个意思就是第i个时间片的关于自然需求的出行分布。
在时间片i,路网上的需求被划分为两类,一类是时间片i新产生的自然需求,这类需求用下图中的绿色线表示,另一类就是之前产生的自然需求,但是直到时间片i还没有完成出行,这一类需求用下图中的红色线表示。这两类需求的和也就是时间片i的总需求了,这一类需求用蓝色线表示。
仿真推演过程
假设时间片i之前所有的出行都完成了,也就是说在时间片i只有上述提到的第一类需求,则此时网络荷载可用下式计算: r ( i ) = ∫ P ^ ( u / i ) d u ( 2 ) r(i)=\int \hat P(u/i)du \quad (2) r(i)=∫P^(u/i)du(2)
得到时间片i的网络荷载之后,便可以用式3计算此时网络的平均速度。 v ( i ) = h ( r ( i ) ) ( 3 ) v(i)=h(r(i) )\quad (3) v(i)=h(r(i))(3)
假设网络的自由流速度为vf,当网络运行的速度就是vf时,那么在 Δ t \Delta t Δt时间内,平均完成的自然需求就是 Δ t \Delta t Δt。需要说明的是本研究中定义的自然需求就是自由流下的行程时间,因此当就是自由流运行时,其实单位时间完成的需求就是这个单位时间。但是一旦网络的运行速度低于自由流速度,那么可以想到 Δ t \Delta t Δt时间内完成的自然需求肯定小于 Δ t \Delta t Δt了,而应该是式4所示的比例。 ρ i = v ( i ) / v f ( 4 ) \rho_i=v(i)/v_f \quad (4) ρi=v(i)/vf(4)在 Δ t \Delta t Δt时间内实际完成的总需求是 ρ i Δ t \rho_i \Delta t ρiΔt其余未完成的需求就将传递到i+1时间片。
那如何计算这种在时间片i未完成,而需要传递到时间片i+1的需求呢?可以将上述图3的绿色线(出行分布)往x轴负方向移动 ρ i Δ t \rho_i \Delta t ρiΔt,那么此时还处在u>0的那些面积就是时间片i还没有完成的需求了。该过程可以用公式5来表示。 P − ( u / i ) = { P ^ ( u + ρ i Δ t / i ) , u > = 0 0 , u < 0 ( 5 ) \stackrel{-}{P}(u/i) = \left\{ \begin{aligned} \hat P (u+\rho_i \Delta t/i) , u>=0 \\ 0 , u<0 \end{aligned} \right. \quad (5) P−(u/i)={
P^(u+ρiΔt/i),u>=00,u<0(5)
如此一来便可以计算时间片i+1时的需求分布为公式6所示。 P ( u / i + 1 ) = P − ( u / i ) + P ^ ( u / i + 1 ) ( 6 ) P(u/i+1)=\stackrel{-}{P}(u/i)+\hat P(u/i+1) \quad (6) P(u/i+1)=P−(u/i)+P^(u/i+1)(6)再用式7计算出时间片i+1时的网络载荷 r ( i + 1 ) = ∫ P ( u / i + 1 ) d u ( 7 ) r(i+1)=\int P(u/i+1)du \quad (7) r(i+1)=∫P(u/i+1)du(7)
当然此时也可以在算出网络的平均速度。
如上不断的循环迭代,就可以依次算出各个时间片的网络载荷和网络速度了。
TDM政策效果评估
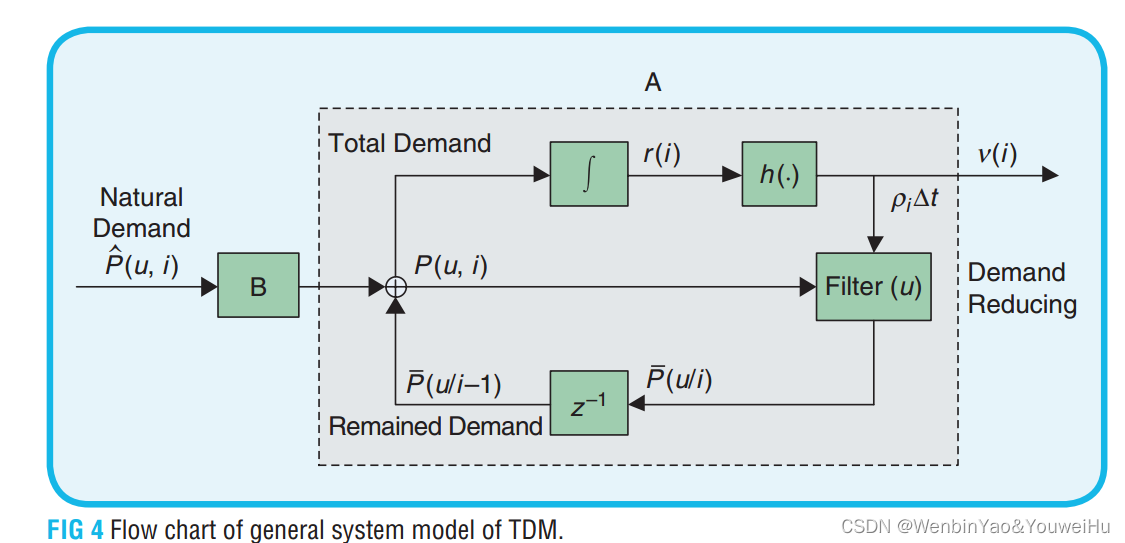
上述方法论的整个逻辑过程如下图所示,其中A就是整个仿真过程,因此这个仿真的输入是各个时刻自然需求分布,输出是各个时刻的网络载荷和网路平均速度。那么问题就来了,如果我构建这个仿真过程就只是为了知道各个时刻的网络载荷和网络平均速度,那我直接用数据算出来不就行了吗?为啥需要这么一个复杂的仿真推演过程呢?因为大家可以看到在上述的图2中,其实我们已经是算出了各个时刻的网络载荷和网络平均速度了,因此这样一个仿真推演过程似乎是显的有些多余了。
没错,如果只是想知道网络各个时刻下的网络载荷和网络平均速度,那么这个仿真确实是没意义的,这个仿真的意义在于,我们可以修改输入,然后知道当输入改变时,输出会发生怎么样的改变。而我们这个输入是各个时刻的出行需求分布,而所有的交通需求管理政策恰恰是去改变这个出行需求分布的,因此可以根据交通需求管理政策对输入的改变去模拟仿真tdm政策的效果,这也就是这个仿真模型提出的作用。
政策效果评估示例介绍
作者首先是用GPS轨迹数据去构建了上述这个仿真模型。然后分别分析了限行政策、需求改变政策(Staggered Shifts Policy)、出行长度改变政策的效果。
限行政策
限行实际上是抑制了需求,也就是假设一定量的车不会在开出来到路网中去了。因此其实模拟限行政策就是设置输入的需求为(1+x)P(u,t),其中x就是不限行日的需求的增加量。最后实验就是取限行日的数据得到出行需求的分布,用上述模型去仿真,然后设置需求为(1+x)P(u,t),即为不限行时的效果。
需求改变政策(Staggered Shifts Policy)
有x%的车的出行时间整体后移半个小时,但是车辆总数不改变。其实就是对应的去改变P(u,t)即可。
出行长度改变政策
作者是假设删掉了10%出行距离最短的车,和删掉了10%出行距离最长的车,然后分别仿真,观察其效果。
参考文献
Zhang, P., Lei, F., Ma, Y., Lu, L., & Zhu, G. (2019). The General System Model of Vehicle TDM Effect on Urban Road Traffic. IEEE Intelligent Transportation Systems Magazine, 13(1), 160-168.