论文速读 – SalsaNet: Fast Road and Vehicle Segmentation in LiDAR Point Clouds for Autonomous Driving
介绍:
本文主要描述了关于激光点云在自动驾驶领域语义分割的网络,主要分割路面与车辆。网络结构简单移动,原文源码版本是tensorflow版本,源码清晰简单易懂。后期升级版SalsaNext也会奉上,喜欢的同学给点个赞吧,您的支持是我更新的最大动力!

参考:
1.【论文阅读】SalsaNet+SalsaNext
2. salsaNet
3. resnet shortcut抄近道
一. SalsaNet
1. 主要工作
- 介绍了一种编码器-解码器体系结构,用于实时语义分割,针对道路和车辆点。
- 自动标注3D激光雷达点云,从其他传感器模态标注结果转换标签
- 研究了
两种常用的点云投影方法BEV, FSV及其在语义上的效果,比较准确性和速度。 - Kitti 数据集提出了定量比价与其他sota网络。
2. 方法
2.1 自动化数据标注
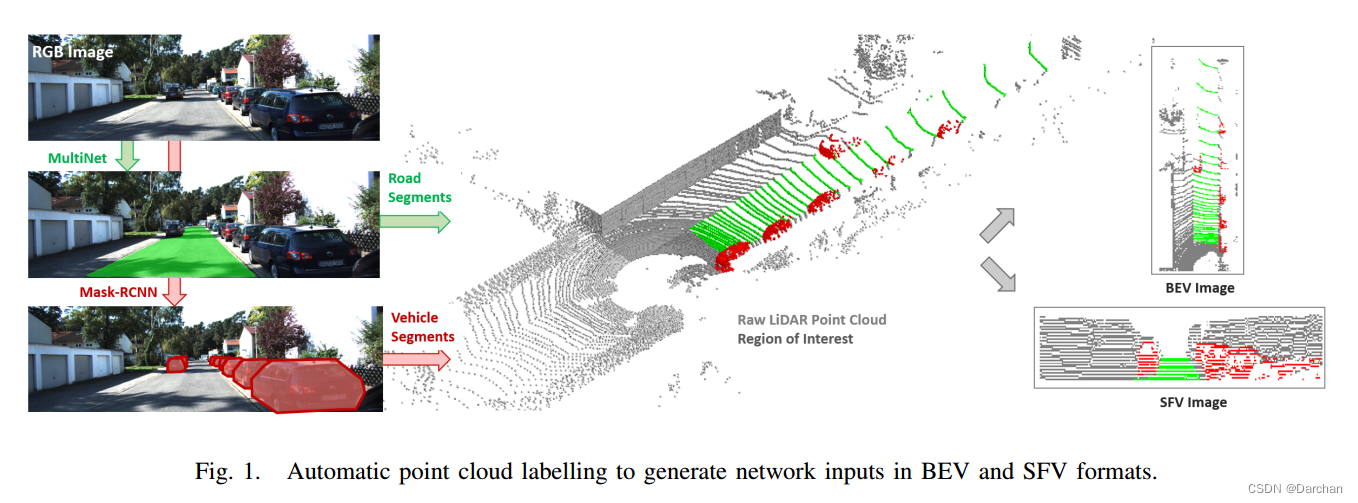
MultiNet: 图像地面分割,得到地面标签
MaskRCNN: 图像车辆分割,得到车辆标签
最后利用camera-lidar外参文件,对BEV和SFV image,标记出对应点云。个人理解是将点云投影到图像上,把图像上对应标签的点云赋予标签即可。
2.2 点云表征
BEV:鸟瞰图,编码4通道信息,包含每个cell平均高度、最大高度、平均强度、点数。高度最小值和std,实验证明没贡献,实验证明此输入模型效果更好。
SFV:前视图,把点云组成uv坐标系。需要编码的内容包括3d坐标系下的坐标、强度值i、范围r以及一个用于表示是否被占用的掩码,相当于变成了6通道的输入。
2.3 网络结构与源码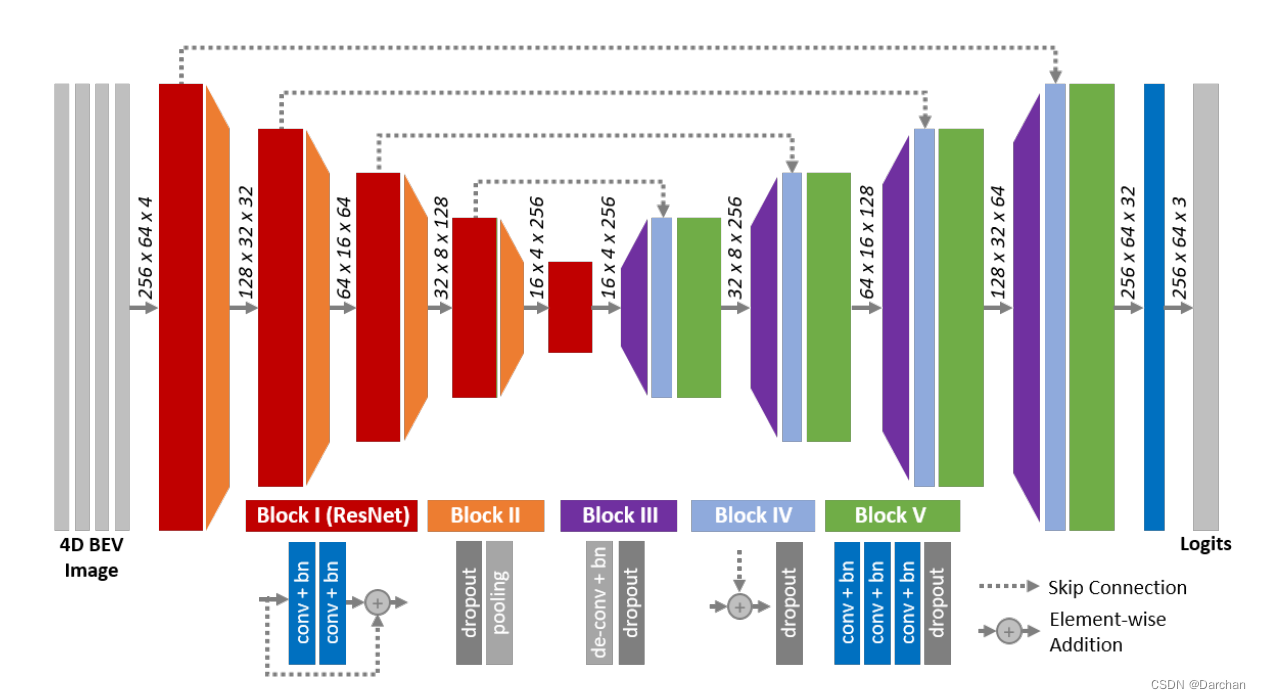
网络的源码结构:
## encoder
down0c, down0b = resBlock(input_img, filter_nbr=kernel_number, dropout_rate=dropout_rate, kernel_size=3, stride=1, layer_name="res0", training=is_training, repetition=1)
down1c, down1b = resBlock(down0c, filter_nbr=2 * kernel_number, dropout_rate=dropout_rate, kernel_size=3, stride=1, layer_name="res1", training=is_training, repetition=1)
down2c, down2b = resBlock(down1c, filter_nbr=4 * kernel_number, dropout_rate=dropout_rate, kernel_size=3, stride=1, layer_name="res2", training=is_training, repetition=1)
down3c, down3b = resBlock(down2c, filter_nbr=8 * kernel_number, dropout_rate=dropout_rate, kernel_size=3, stride=1, layer_name="res3", training=is_training, repetition=1)
down4b = resBlock(down3c, filter_nbr=8 * kernel_number, dropout_rate=dropout_rate, kernel_size=3, stride=1, layer_name="res4", training=is_training, pooling=False, repetition=1)
## decoder
up3e = upBlock(down4b, down3b, filter_nbr=8 * kernel_number, dropout_rate=dropout_rate, kernel_size=(3, 3), layer_name="up3", training=is_training)
up2e = upBlock(up3e, down2b, filter_nbr=4 * kernel_number, dropout_rate=dropout_rate, kernel_size=(3, 3), layer_name="up2", training=is_training)
up1e = upBlock(up2e, down1b, filter_nbr=2 * kernel_number, dropout_rate=dropout_rate, kernel_size=(3, 3), layer_name="up1", training=is_training)
up0e = upBlock(up1e, down0b, filter_nbr= kernel_number, dropout_rate=dropout_rate, kernel_size=(3, 3), layer_name="up0", training=is_training)
with tf.variable_scope('logits'):
logits = conv2d_layer(up0e, num_classes, [1, 1], activation_fn=None)
print("logits", logits.shape.as_list())
return logits
encoder
使用的是残差块ResNet,并且除了最后一个残差块,每个残差块后都跟着一个dropout和池化组成的子模块,其中池化采用的是2×2大小的最大池化,经过四次的子模块,将feature map的大小缩小一共16倍,与此同时通道数目也增加64倍。
def resBlock(input_layer, filter_nbr, dropout_rate, kernel_size=(3, 3), stride=1, layer_name="rb", training=True,
pooling=True, repetition=1):
with tf.variable_scope(layer_name):
resA = input_layer
for i in range(repetition):
shortcut = conv2d_layer(resA, filter_nbr, kernel_size=(1, 1), stride=stride, activation_fn=leakyRelu,
scope=layer_name + '_s_%d' % (i + 0))
resA = conv2d_layer(resA, filter_nbr, kernel_size, normalizer_fn=batchnorm,
activation_fn=leakyRelu,
normalizer_params={'is_training': training},
scope=layer_name + '_%d_conv1' % (i + 0))
resA = conv2d_layer(resA, filter_nbr, kernel_size, normalizer_fn=batchnorm,
activation_fn=leakyRelu,
normalizer_params={'is_training': training},
scope=layer_name + '_%d_conv2' % (i + 0))
resA = tf.add(resA, shortcut)
if pooling:
resB = dropout_layer(resA, rate=dropout_rate, name="dropout")
resB = maxpool_layer(resB, (2, 2), padding='same')
print(str(layer_name) + str(resB.shape.as_list()))
return resB, resA
else:
resB = dropout_layer(resA, rate=dropout_rate, name="dropout")
print(str(layer_name) + str(resB.shape.as_list()))
return resB
decoder
由三个小模块组成.
- 第一个小模块:
deconv+bn+leakyRelu+ dropoutput - 第二个小模块:
shortcut+dropout - 第三个小模块:三个
conv+bn+leakyRelu+dropout
def upBlock(input_layer, skip_layer, filter_nbr, dropout_rate, kernel_size=(3, 3), layer_name="dec", training=True):
with tf.variable_scope(layer_name + "_up"):
upA = conv2d_trans_layer(input_layer, filter_nbr, kernel_size, 2, normalizer_fn=batchnorm,
activation_fn=leakyRelu,
normalizer_params={'is_training': training}, scope="tconv")
upA = dropout_layer(upA, rate=dropout_rate, name="dropout")
with tf.variable_scope(layer_name + "_add"):
upB = tf.add(upA, skip_layer, name="add")
upB = dropout_layer(upB, rate=dropout_rate, name="dropout_add")
with tf.variable_scope(layer_name + "_conv"):
upE = conv2d_layer(upB, filter_nbr, kernel_size, normalizer_fn=batchnorm,
activation_fn=leakyRelu,
normalizer_params={'is_training': training}, scope="conv1")
upE = conv2d_layer(upE, filter_nbr, kernel_size, normalizer_fn=batchnorm,
activation_fn=leakyRelu,
normalizer_params={'is_training': training}, scope="conv2")
upE = conv2d_layer(upE, filter_nbr, kernel_size, normalizer_fn=batchnorm,
activation_fn=leakyRelu,
normalizer_params={'is_training': training}, scope="conv3")
upE = dropout_layer(upE, rate=dropout_rate, name="dropout_conv")
print(str(layer_name) + str(upE.shape.as_list()))
return upE
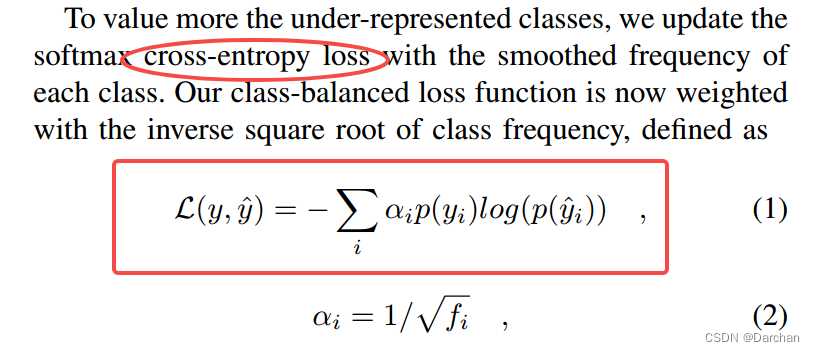
2.4 类平衡loss
数据集类型不平衡对网络性能的影响,如果按照一般的网络进行训练,对这种类别的判断会产生不好的影响,因此论文修改了损失函数的写法,引入一个权值的项,以此保证出现少的类别也能够有足够的影响力。
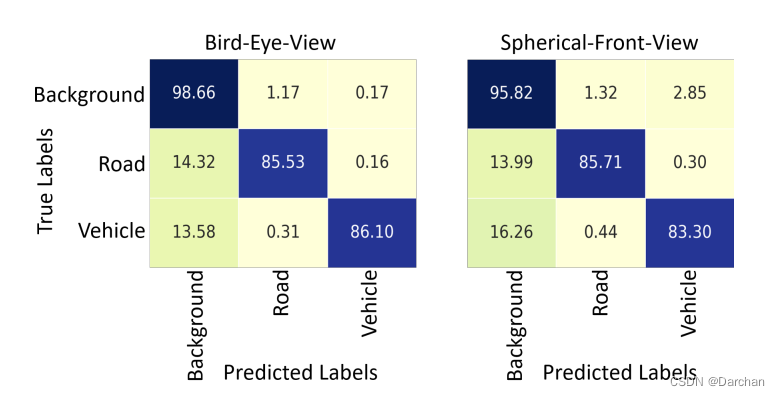
3. 结果