继上一篇博文Vins-Fusion初始化位姿——3D-2D:PNP求解当前帧位姿,本文继续介绍Vins-Fusion双目初始化时,三角化triangulate。
一、三角化triangulate
三角化triangulate是根据特征点在多个相机下的投影恢复出特征点的3D位置。
二、三角化求解流程
1.遍历当前帧特征点,若该特征点深度为正,说明已经三角化了。
// 已经三角化过
if (it_per_id.estimated_depth > 0)
continue;
2.双目首帧三角化
三角化是根据多个相机下的投影恢复出特征点的3D位置,需要已知相机位姿和投影像素位置(归一化相机平面像素坐标)
(1)左右目位姿
左目起始帧start_frame位姿
// 起始观测帧位姿 Tcw
int imu_i = it_per_id.start_frame;
Eigen::Matrix<double, 3, 4> leftPose;
Eigen::Vector3d t0 = Ps[imu_i] + Rs[imu_i] * tic[0];
Eigen::Matrix3d R0 = Rs[imu_i] * ric[0];
leftPose.leftCols<3>() = R0.transpose();
leftPose.rightCols<1>() = -R0.transpose() * t0;
右目起始帧start_frame位姿
// 起始观测帧位姿Tcw
Eigen::Matrix<double, 3, 4> rightPose;
Eigen::Vector3d t1 = Ps[imu_i] + Rs[imu_i] * tic[1];
Eigen::Matrix3d R1 = Rs[imu_i] * ric[1];
rightPose.leftCols<3>() = R1.transpose();
rightPose.rightCols<1>() = -R1.transpose() * t1;
(2)左右目归一化相机平面像素坐标
// 取左右目对应的归一化相机平面点
Eigen::Vector2d point0, point1;
Eigen::Vector3d point3d;
point0 = it_per_id.feature_per_frame[0].point.head(2);
point1 = it_per_id.feature_per_frame[0].pointRight.head(2);
注:it_per_id.feature_per_frame[0].point.head(2),表示左目归一化相机平面的前两个数据,即x, y。
(3)三角化
有了位姿和对应的投影位置就可以三角化求路标点了(3D坐标)
triangulatePoint(leftPose, rightPose, point0, point1, point3d);
//函数原型:
/**
* SVD计算三角化点
* @param Pose0 位姿Tcw
* @param Pose1 位姿Tcw
* @param point0 归一化相机坐标系平面点
* @param point1 归一化相机坐标系平面点
* @param point_3d output 三角化点,世界坐标系点
*/
void FeatureManager::triangulatePoint(Eigen::Matrix<double, 3, 4> &Pose0, Eigen::Matrix<double, 3, 4> &Pose1,
Eigen::Vector2d &point0, Eigen::Vector2d &point1, Eigen::Vector3d &point_3d)
{
Eigen::Matrix4d design_matrix = Eigen::Matrix4d::Zero();
design_matrix.row(0) = point0[0] * Pose0.row(2) - Pose0.row(0);
design_matrix.row(1) = point0[1] * Pose0.row(2) - Pose0.row(1);
design_matrix.row(2) = point1[0] * Pose1.row(2) - Pose1.row(0);
design_matrix.row(3) = point1[1] * Pose1.row(2) - Pose1.row(1);
Eigen::Vector4d triangulated_point;
triangulated_point =
design_matrix.jacobiSvd(Eigen::ComputeFullV).matrixV().rightCols<1>();
point_3d(0) = triangulated_point(0) / triangulated_point(3);
point_3d(1) = triangulated_point(1) / triangulated_point(3);
point_3d(2) = triangulated_point(2) / triangulated_point(3);
}
以上部分解析如下:
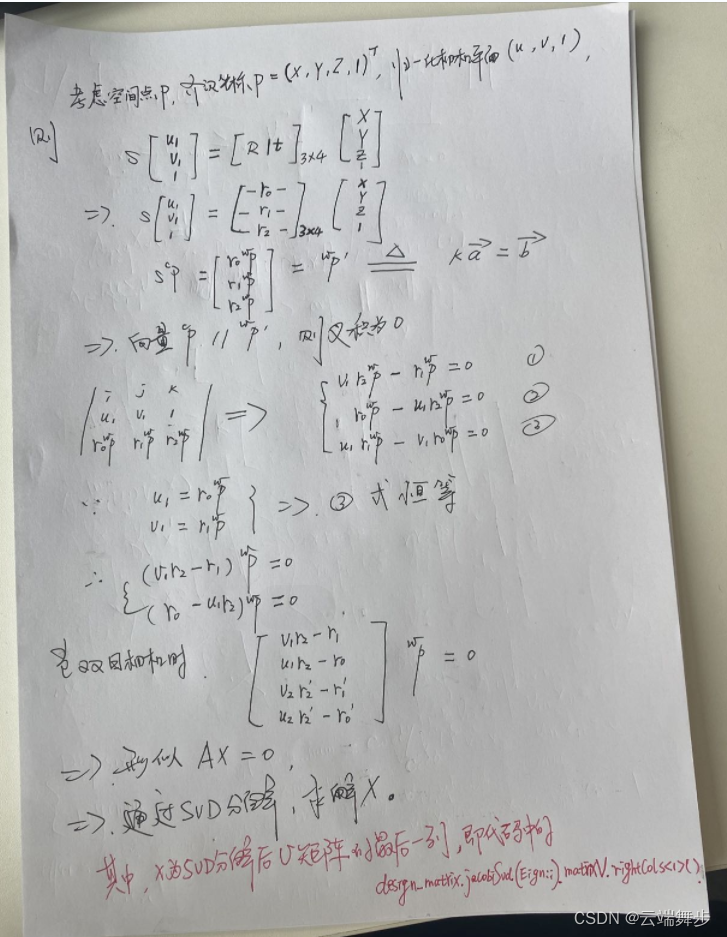
疑问点:根据推导design_matrix的1-2行对应代码中的2-1,暂时还不知道为啥?
ps:对于代码中调用Eigen:svd库求解最小二乘Ax = 0问题的理论基础可以参考文章奇异值分解(SVD)方法求解最小二乘问题 ,有问题留言交流。
3.双目非首帧三角化
完成双目首帧三角化后,遍历当前特征点的观测帧,与首帧观测帧构建最小二乘,并用SVD求解,求解过程与首帧类似,具体如下
int imu_i = it_per_id.start_frame, imu_j = imu_i - 1;
Eigen::MatrixXd svd_A(2 * it_per_id.feature_per_frame.size(), 4);
int svd_idx = 0;
Eigen::Matrix<double, 3, 4> P0;
// 首帧观测帧的位姿 Twc
Eigen::Vector3d t0 = Ps[imu_i] + Rs[imu_i] * tic[0];
Eigen::Matrix3d R0 = Rs[imu_i] * ric[0];
P0.leftCols<3>() = Eigen::Matrix3d::Identity();
P0.rightCols<1>() = Eigen::Vector3d::Zero();
// 遍历当前特征点观测帧,与首帧观测帧构建最小二乘,SVD三角化
for (auto &it_per_frame : it_per_id.feature_per_frame)
{
imu_j++;
// 当前观测帧位姿 Twc
Eigen::Vector3d t1 = Ps[imu_j] + Rs[imu_j] * tic[0];
Eigen::Matrix3d R1 = Rs[imu_j] * ric[0];
// 与首帧观测帧之间的位姿变换 Tij
Eigen::Vector3d t = R0.transpose() * (t1 - t0);
Eigen::Matrix3d R = R0.transpose() * R1;
// Tji
Eigen::Matrix<double, 3, 4> P;
P.leftCols<3>() = R.transpose();
P.rightCols<1>() = -R.transpose() * t;
Eigen::Vector3d f = it_per_frame.point.normalized();
svd_A.row(svd_idx++) = f[0] * P.row(2) - f[2] * P.row(0);
svd_A.row(svd_idx++) = f[1] * P.row(2) - f[2] * P.row(1);
if (imu_i == imu_j)
continue;
}
// todo
ROS_ASSERT(svd_idx == svd_A.rows());
Eigen::Vector4d svd_V = Eigen::JacobiSVD<Eigen::MatrixXd>(svd_A, Eigen::ComputeThinV).matrixV().rightCols<1>();
double svd_method = svd_V[2] / svd_V[3];
//it_per_id->estimated_depth = -b / A;
//it_per_id->estimated_depth = svd_V[2] / svd_V[3];
it_per_id.estimated_depth = svd_method;
//it_per_id->estimated_depth = INIT_DEPTH;
if (it_per_id.estimated_depth < 0.1)
{
it_per_id.estimated_depth = INIT_DEPTH;
}
以上就完成了Vins-Fusion双目初始化时,三角化triangulate求解特征点的3D位置(路标点)
参考:
(1)https://blog.csdn.net/u010196944/article/details/127569002?spm=1001.2014.3001.5501
(2)https://blog.csdn.net/u010196944/article/details/127514369?spm=1001.2014.3001.5501