简介
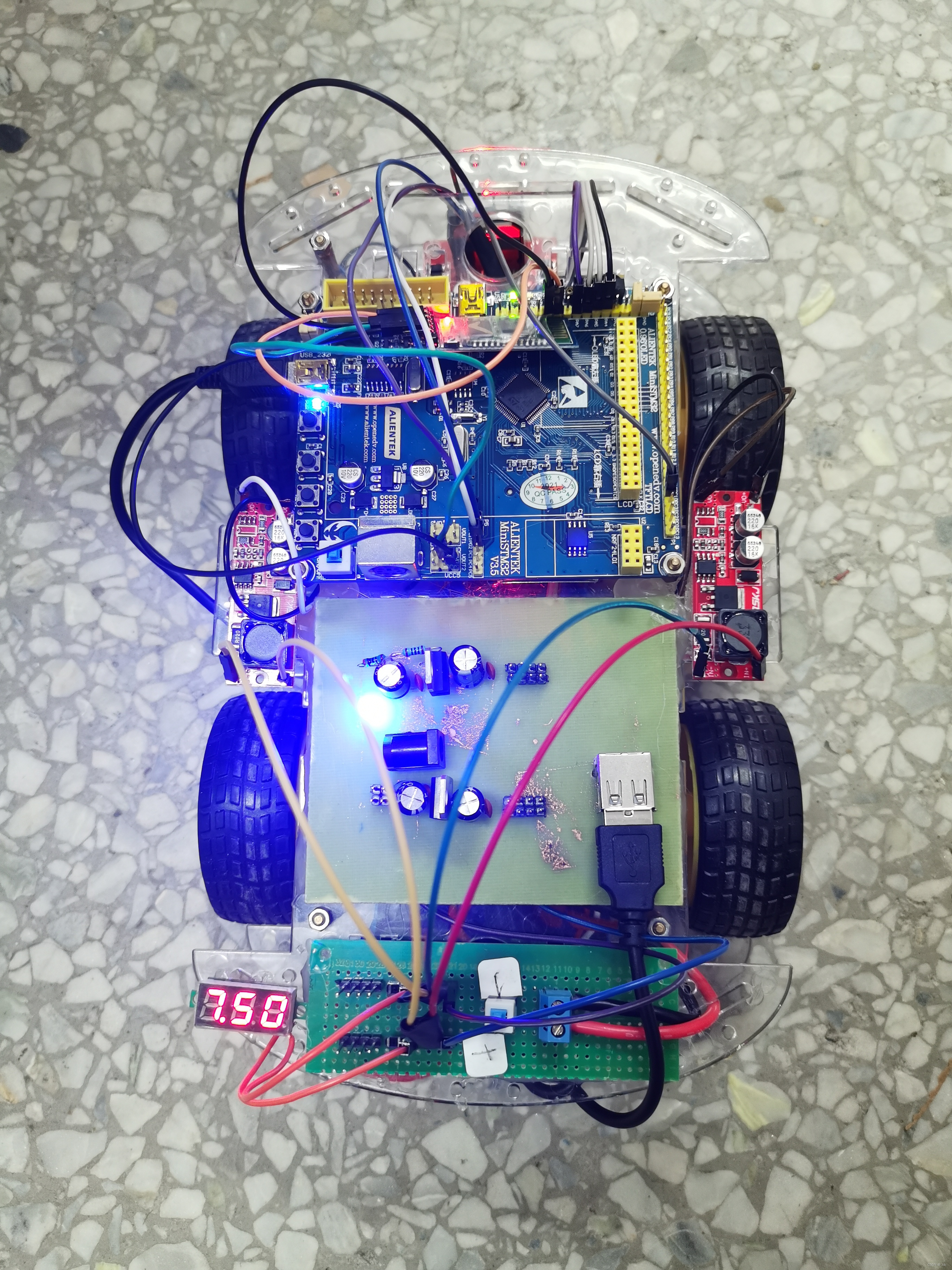
“基于stm32F1的蓝牙控制小车”由L898N电机驱动模块、电源管理模块、stm32f1主控模块、蓝牙串口通信模块。电机驱动模块使用了两个L298N芯片来驱动4路电机,使能端连接4路来自主控板的电平信号;电源管理模块使用了LM2940-5.0芯片进行12V到5V的转换,12V用于电机模块的供电,5V用于蓝牙模块、传感器等的供电;主控模块采用了MDK编辑程序,然后下载到主控板,实现硬件与软件的交互;蓝牙串口通信模块则是与主控板进行串口通信,同时与手机进行通信;控制端模块是一个集开启蓝牙、搜索蓝牙、控制小车等功能。用户可以通过手机控制端进行控制小车的运动,实现一些用户需要的功能和服务。
L298N驱动
L298N 是ST 公司生产的一种高电压、大电流电机驱动芯片。该芯片采用15 脚封装。主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间 峰值电流可达3A,持续工作电流为2A;额定功率25W。内含两个H 桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电 压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用L298N 芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
1、控制板内部带5V逻辑电平转换芯片,不需要额外的5V供电。
2、如果EN1、EN2、EN3、EN4不接PWM调速信号,次脚需要和对应的管教短接。
3、GND和12V接电机电源,其中12V可以接7V--24V电平,板子上的电源开关只是控制逻辑5V电平的开关,L298的12V电源不受此开关控制.
4、输出端和输入端一一对应,当输入端为5V时,输出端也为高电平,输入端为低电平时输出亦为低电平。
电源管理模块
电源是整个系统稳定工作的前提,因此必须有一个合理的电源设计,对于小车来说电源设计应
注意两点:
1. 与一般的稳压电源不同,小车的电池电压一般在6-8V 左右,还要考虑在电池损耗的情况下电压的降低,因此常用的78 系列稳压芯片不再能够满足要求,因此必须采用低压差的稳压芯片,在本文中以较为常见的LM2940-5.0 为例。
2. 单片机必须与大电流器件分开供电,避免大电流器件对单片机造成干扰,影响单片机的稳定运行。
现在各种新型的电源芯片层出不穷,各位读者可以根据自己的需求自行选择电源芯片,对于本设计应该主要注意稳压压差和最大输出电流两个指标能否满足设计要求。
LM2940 系列是输出电压固定的低压差三端端稳压器;输出电压有5V、8V、10V 多种;最大输出电流1A;输出电流1A 时,最小输入输出电压差小于0.8V;最大输入电压26V;工作温度-40~+125℃;
内含静态电流降低电路、电流限制、过热保护、电池反接和反插入保护电路。同时LM2940 价格适中而且较容易购买,非常适合在本设计中使用。如图所示,采用两路供电,这样可以使用其中一路单独为STM32F1电路板供电,指示灯等供电。另外一路提供L298N、舵机、蓝牙的工作电压,L298N 的驱动电压由电池不经任何处理直接给出。舵机可以用6V 供电,也可以直接用5V 供电。

PCB图:

系统软件设计
主程序:由蓝牙数据接收判断函数组成,对蓝牙接收信号进行判断,并作出对应反应。(图中省略了初始化代码)
while(1)
{
switch(flag)
{
case 0: Stop(); break ;
case 1: Turnleft(); break ;
case 2: Turnright(); break ;
case 3: Turnback(); break ;
case 4: Turnfront(); break ;
case 5: Leftaround(); break ;
case 6: Rightaround(); break ;
default: Stop(); break ;
}
}
串口配置函数:
//利用中断进行蓝牙的收发
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
// USART_DeInit(USART1); //复位串口1
// USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10
/* USARTx configured as follow:
- BaudRate = 9600 baud 波特率
- Word Length = 8 Bits 数据长度
- One Stop Bit 停止位
- No parity 校验方式
- Hardware flow control disabled (RTS and CTS signals) 硬件控制流
- Receive and transmit enabled 使能发送和接收
*/
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启中断
//Usart1 NVIC 配置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_Cmd(USART1, ENABLE); //使能串口
电机驱动GPIO初始化函数:
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_SetBits(GPIOC, GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_6|GPIO_Pin_9);
电机执行函数:
//停止模式
void Stop(void)
{
GPIO_ResetBits(GPIOC,GPIO_Pin_0);
GPIO_ResetBits(GPIOC,GPIO_Pin_1);
GPIO_ResetBits(GPIOC,GPIO_Pin_2);
GPIO_ResetBits(GPIOC,GPIO_Pin_9);
}
//左转模式 -> 左电机正转,右电机反转
void Turnleft(void)
{
GPIO_SetBits(GPIOC,GPIO_Pin_0);
GPIO_ResetBits(GPIOC,GPIO_Pin_1);
GPIO_ResetBits(GPIOC,GPIO_Pin_2);
GPIO_SetBits(GPIOC,GPIO_Pin_9);
GPIO_SetBits(GPIOC,GPIO_Pin_6);
}
//右转模式 -> 左电机反转,右电机正转
void Turnright(void)
{
GPIO_ResetBits(GPIOC,GPIO_Pin_0);
GPIO_SetBits(GPIOC,GPIO_Pin_1);
GPIO_SetBits(GPIOC,GPIO_Pin_2);
GPIO_ResetBits(GPIOC,GPIO_Pin_9);
GPIO_SetBits(GPIOC,GPIO_Pin_6);
}
//后退模式 -> 左电机反转,右电机反转
void Turnback(void)
{
GPIO_ResetBits(GPIOC,GPIO_Pin_0);
GPIO_SetBits(GPIOC,GPIO_Pin_1);
GPIO_ResetBits(GPIOC,GPIO_Pin_2);
GPIO_SetBits(GPIOC,GPIO_Pin_9);
GPIO_SetBits(GPIOC,GPIO_Pin_8);
}
//前进模式 -> 左电机正转,右电机正转
void Turnfront(void)
{
GPIO_SetBits(GPIOC,GPIO_Pin_0);
GPIO_ResetBits(GPIOC,GPIO_Pin_1);
GPIO_SetBits(GPIOC,GPIO_Pin_2);
GPIO_ResetBits(GPIOC,GPIO_Pin_9);
GPIO_SetBits(GPIOC,GPIO_Pin_7);
}
//以左电机为中心原地左转
void Leftaround(void)
{
GPIO_SetBits(GPIOC,GPIO_Pin_0);
GPIO_ResetBits(GPIOC,GPIO_Pin_1);
GPIO_SetBits(GPIOC,GPIO_Pin_2);
GPIO_SetBits(GPIOC,GPIO_Pin_9);
}
//以右电机为中心原地右转
void Rightaround(void)
{
GPIO_SetBits(GPIOC,GPIO_Pin_0);
GPIO_SetBits(GPIOC,GPIO_Pin_1);
GPIO_SetBits(GPIOC,GPIO_Pin_2);
GPIO_ResetBits(GPIOC,GPIO_Pin_9);
}
以上便是主要代码和硬件资料,如需详细资料,如手机端APP,完整代码,硬件原理图和PCB,请在下载资料里自提。