前言
今天要学习的是独立看门狗,看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位。即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。
一、IWDG
1.简介
独立看门狗 (IWDG) 由其专用低速时钟 (LSI) 驱动,因此即便在主时钟发生故障时仍然保持 工作状态。
IWDG 最适合应用于那些需要看门狗作为一个在主程序之外,能够完全独立工作,并且对时
间精度要求较低的场合。
2.主要特性
● 自由运行递减计数器
● 时钟由独立 RC 振荡器提供(可在待机和停止模式下运行)
● 当递减计数器值达到 0x000 时产生复位(如果看门狗已激活)
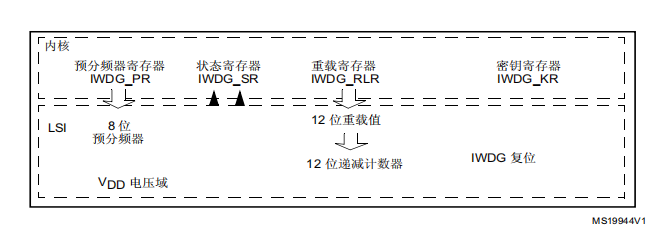
3.独立看门狗框图
二、使用步骤
1.独立看门狗初始化
void iwdg_init(void)
{
//允许访问独立看门狗
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);
//配置独立看门狗的分频值为256
//独立看门狗的硬件时钟=32khz/256=125hz
IWDG_SetPrescaler(IWDG_Prescaler_256);
//设置独立看门狗的计数值124,1秒钟
IWDG_SetReload(125-1);
//刷新计数值
IWDG_ReloadCounter();
//使能看门狗工作
IWDG_Enable();
}
2.完整代码
#include "stm32f4xx.h" // Device header
#include "sys.h"
#include "stdio.h"
static GPIO_InitTypeDef GPIO_InitStructure;
static USART_InitTypeDef USART_InitStructure;
static NVIC_InitTypeDef NVIC_InitStructure;
static uint16_t d;
struct __FILE {
int handle; /* Add whatever you need here */ };
FILE __stdout;
FILE __stdin;
int fputc(int ch, FILE *f)
{
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
return ch;
}
void delay_ms(uint32_t n)
{
while(n--)
{
SysTick->CTRL = 0; // Disable SysTick
SysTick->LOAD = (168000)-1; // Count from 255 to 0 (256 cycles)
SysTick->VAL = 0; // Clear current value as well as count flag
SysTick->CTRL = 5; // Enable SysTick timer with processor clock
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set
}
SysTick->CTRL = 0; // Disable SysTick
}
void delay_us(uint32_t n)
{
while(n--)
{
SysTick->CTRL = 0; // Disable SysTick
SysTick->LOAD = (168)-1; // Count from 255 to 0 (256 cycles)
SysTick->VAL = 0; // Clear current value as well as count flag
SysTick->CTRL = 5; // Enable SysTick timer with processor clock
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set
}
SysTick->CTRL = 0; // Disable SysTick
}
void usart1_init(uint32_t band)
{
//打开硬件时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
//打开串口1硬件时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//配置PA9和PA10为服用功能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化
//将PA9和PA10引脚连接到串口1的硬件
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
//配置串口1相关参数:波特率、无校验位、8位数位、1位停止位
USART_InitStructure.USART_BaudRate = band; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //8位数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1; //1个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶检验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //允许收发数据
USART_Init(USART1, &USART_InitStructure);
//配置串口1的中断触发方法 接收一个字节触发中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//配置串口1的中断优先级
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
//使能串口1工作
USART_Cmd(USART1,ENABLE);
}
void iwdg_init(void)
{
//允许访问独立看门狗
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);
//配置独立看门狗的分频值为256
//独立看门狗的硬件时钟=32khz/256=125kz
IWDG_SetPrescaler(IWDG_Prescaler_256);
//设置独立看门狗的计数值124,1秒钟
IWDG_SetReload(125-1);
//刷新计数值
IWDG_ReloadCounter();
//使能看门狗工作
IWDG_Enable();
}
int main(void)
{
int32_t d;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//使能GPIOF时钟
//GPIOF9,F10初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//复用功能模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOF, &GPIO_InitStructure);//初始化
GPIO_SetBits(GPIOF,GPIO_Pin_9);
usart1_init(115200);
iwdg_init();
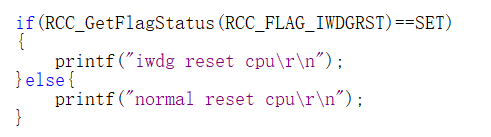
if(RCC_GetFlagStatus(RCC_FLAG_IWDGRST)==SET)
{
printf("iwdg reset cpu\r\n");
}else{
printf("normal reset cpu\r\n");
}
RCC_ClearFlag();
while(1)
{
//delay_ms(2000);
//喂狗
IWDG_ReloadCounter();
}
}
void USART1_IRQHandler(void)
{
//检查标志位
if(USART_GetITStatus(USART1,USART_IT_RXNE)==SET)
{
d=USART_ReceiveData(USART1);
printf(d+"");
//清空标志位
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
三、功能演示
这次实验使用的是裸机代码实现。
首先把while循环的延时2秒注释打开如下图所示:
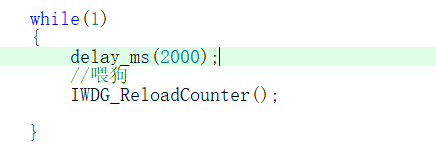
这时就会在2秒后喂狗,这样就会导致独立看门狗复位cup
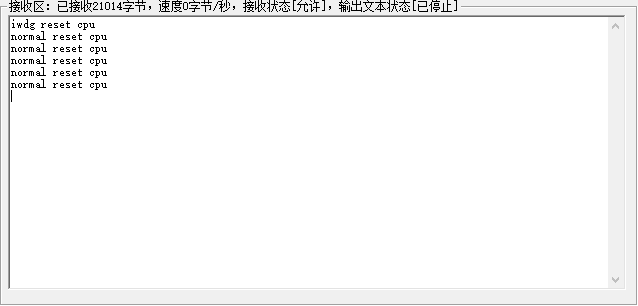
我们使用串口打印信息。
效果如下: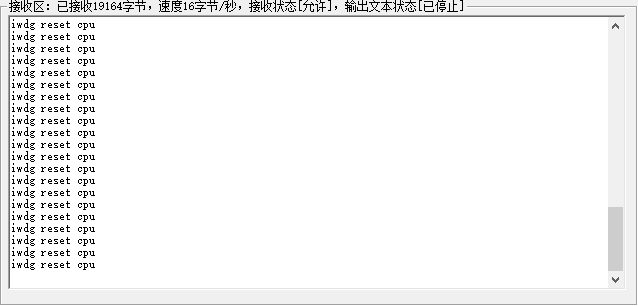
可以看到芯片一直在被看门狗复位。
当把延时两秒的代码注释掉,效果如下图所示: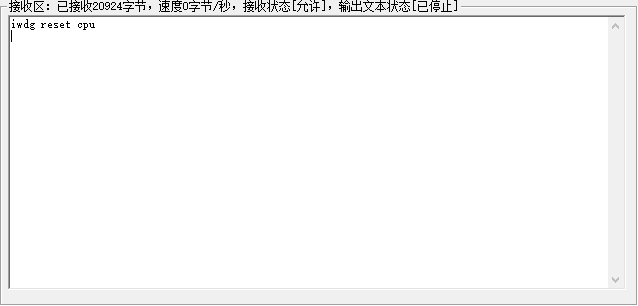
没有一直打印看门狗复位cpu的信息,当按下我们板子上的复位键时