碎碎念:
终于熬过了期末周,可以开始快乐的开发之旅了。
这一期作为一千粉后的首篇博客,由于之后项目会涉及到相关的部分,因此介绍的是使用FPGA实现SD NAND FLASH的读写操作,以雷龙发展提供的CS创世SD NAND FLASH样品为例,分别讲解电路连接、读写时序与仿真和实验结果。
目录

使用FPGA讲解SD NAND FLASH的文章网上也有很多比较详实的内容,本文的部分思路也是参考了其他博主的博客思路。
1 视频讲解
为了便于更加清晰地讲解内容,本文也将文章的对应部分以视频的形式进行了录制:
(后期正在紧锣密鼓制作ing)
2 SD NAND FLASH背景介绍
目前市面上主流的存储芯片,分为了EEPROM、NOR FLASH、NAND FLASH三种,其中后两种是市面上主要的非易失闪存技术,他们分别具有不同的特点:
1.EEPROM
EEPROM (Electrically Erasable Programmable read only memory)是指带电可擦可编程只读存储器。是一种掉电后数据不丢失的存储芯片。 EEPROM 可以在电脑上或专用设备上擦除已有信息,重新编程。一般用在即插即用设备中。
相较于EEPROM计数,下文提到的FLASH技术,具有更快的速度,工艺上可以分为NOR FLASH和NAND FLASH两种
2.NOR FLASH
NOR FLASH是一种非易失闪存技术。其特点是芯片内执行 (XIP),应用程序可以直接在存储芯片内运行,不必再把代码读到系统 RAM 中。其传输效率较高高,在 1~4MB 的小容量时具有很高的成本效益。
3.NAND FLASH
NAND FLASH内部采用非线性宏单元模式,这种结构能提供极高的单元密度,并且写入和擦除的速度很快。作为当前最热门的存储芯片,目前生活中常见的电子产品都会使用到这种存储芯片,例如数码相机、U盘等等。
由于NAND FLASH在大容量应用中的便利性,因此作为今天介绍的主角~
什么是SD NAND呢(以下省略FLASH)?下面的内容是从雷龙发展官网的介绍中得到:
SD NAND俗称贴片式TF卡,尽管与TF卡名称类似,但是有较大的区别:
相比常见的TF卡,SD NAND是专门为内置存储进行设计,焊接在PCB板上以供工业级产品的应用。因此对品质稳定性、一致性、以及尺寸都有较高的要求。
下图中左侧即为SD NAND、右侧是常见的TF卡。


3 样品申请
本文所使用的CS创世SD NAND是从深圳雷龙发展申请获得,可以在官网中最上面找到申请样品的入口:

深圳市雷龙发展有限公司创立于2008年,专注NAND Flash设计研发13年。创始人均为步步高/华为技术背景出身。是一家专注于存储元器件代理分销商。 如果有一些技术问题也可以和其公司人员进行沟通,相关的工作人员非常专业和热心。
下图是我收到的测试样品:

4 电路结构与接口协议
4.1 SD NAND
本文所使用的产品是CSNP4GCR01-AMW,是雷龙的第二代产品,产品如下图所示:

数据手册可以在立创商城进行下载,其封装与连接的电路原理参考图如下图所示:
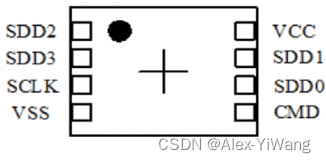
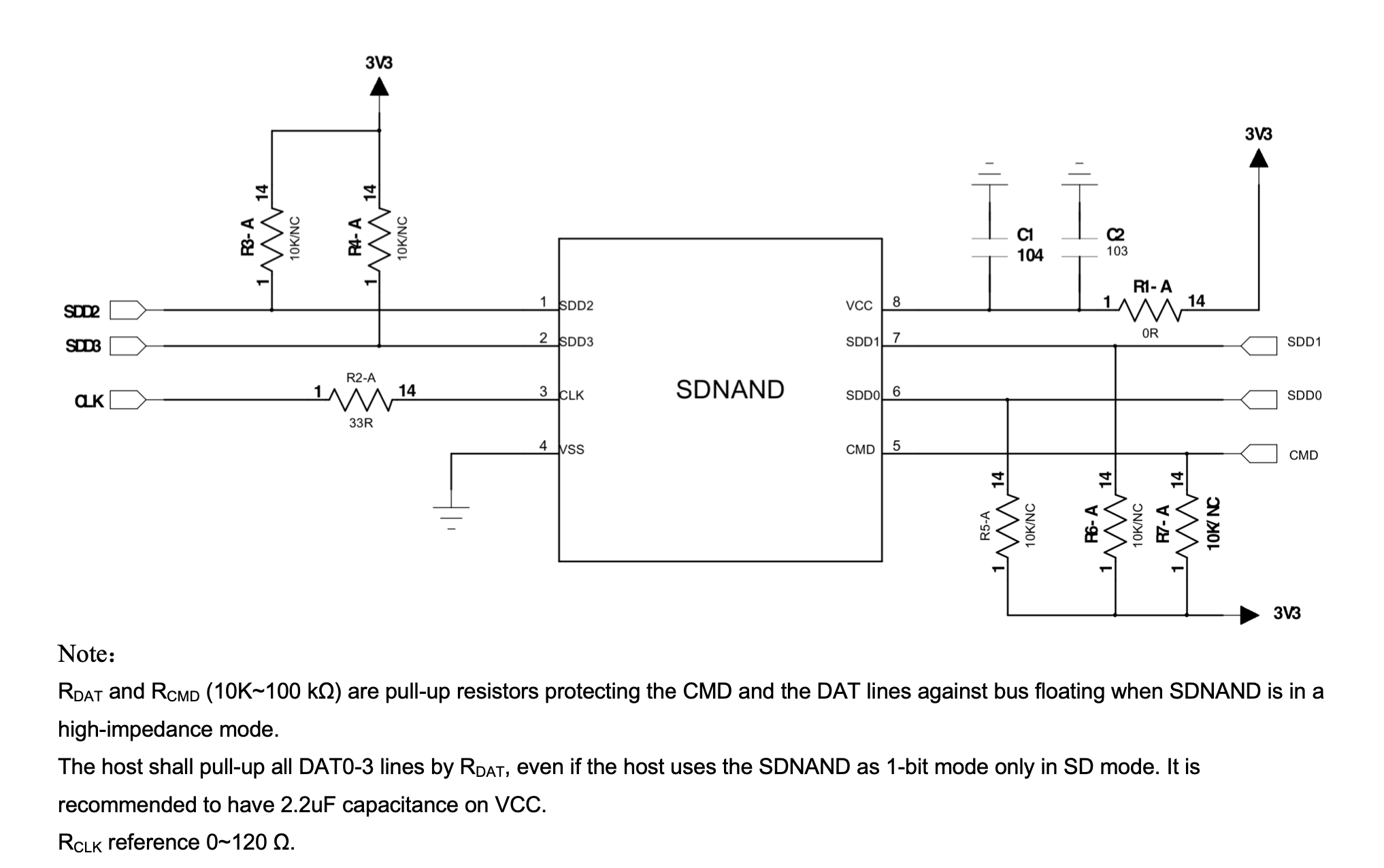
芯片共包含8个引脚,包括4根数据线(6、7、1、2);2根电源线(4、8);1根时钟线(3);1根命令控制线(5)
手册中提供了SD NAND的两种使用模式,分别为SD MODE 以及 SPI MODE。他们所对应的引脚定义,如下图所示:
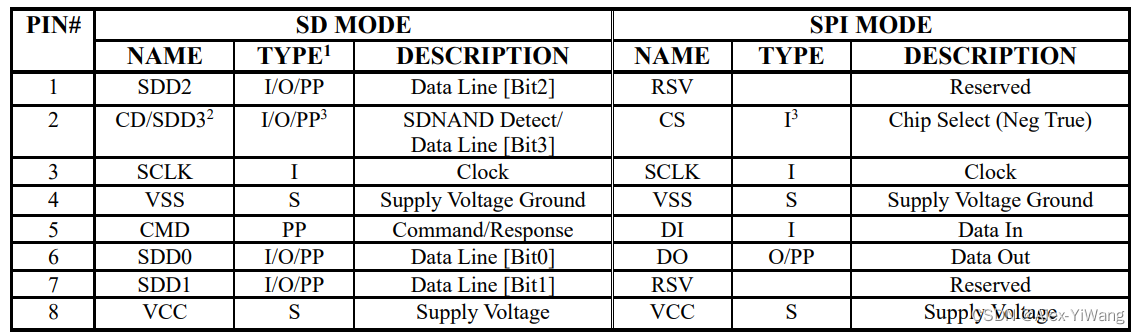
对于两种模式的切换,官方给出了初始化的方式。下文在代码的时序部分也会涉及到相关内容。
在对SD卡数据读写速度要求不高的情况下,选用SPI通信模式可以说是一种最佳方案。因为在该模式下,同只需要通过四根线就是可以完成所有的数据交换,可以为我们节省出宝贵的FPGA I/O资源。下图给出了SPI一对一通信时,主设备与从设备之间的连接关系。

因此本文主要介绍SPI MODE下各个引脚的功能:
| 引脚 | 功能 |
| CLK | 同步时钟线,与SPI总线时钟SCK相连 |
| CMD | 命令控制线,与SPI总线的MOSI相连,主机用于发送命令 |
| SDD0-3 | 只有SDD0使用,与SPI总线MISO相连,用于主机选择从设备 |
| VCC、VSS | 电源线 |
确定了通讯模式后,也就便于我们后文中,利用这种通讯模式按照SD卡的读写时序进行读写操作。
4.2 SD NAND测试板
单独的SD NAND不便于我们使用FPGA进行读写测试,好在官方提供了测试板,如下图所示:

有了它就可以轻松实现SD NAND与我们常见的FPGA开发板上的Micro SD插槽进行连接与测试了。
适用产品:LGA8,6x8mm 封装的SD NAND产品。
测试板尺寸:长度6.22厘米,宽度2.49厘米,接口长度2.53厘米。
使用方法:将芯片焊接至测试板上,可在原有的Micro SD卡座上直接调试和测试。
准备工具:热风枪,锡膏,镊子。温度要求:将热风枪温度调至300摄氏度℃即可焊接。
4.3 FPGA开发板
本文所使用的是黑金的AX301开发板,上面装有一个 Micro SD 卡座, FPGA 通过 SPI 数据总线访问 Micro SD 卡,SD 卡座和 FPGA 的硬件电路连接如下:
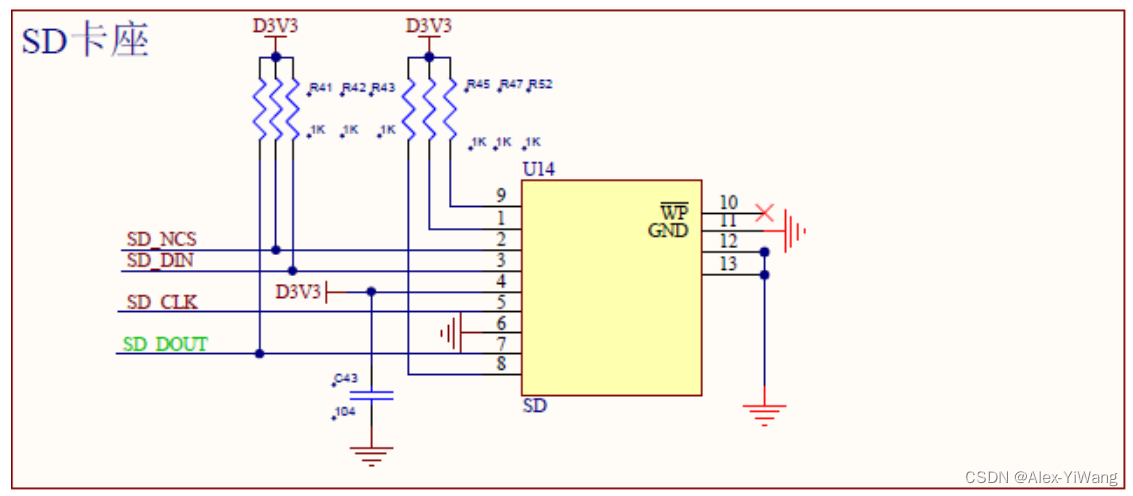
借由硬件电路的连接,FPGA可以直接与我们的SD NAND进行通信了。
至此,我们已经实现了SD NANDSPI通信方式方案的确定以及基于此的硬件电路连接,下一步就是根据SD卡的读写时序讲通信方式初始化为SPI模式,并按照SD卡协议进行读写操作。
5 SD卡协议与时序流程
5.1 SD卡协议
以下内容来自黑金的实验手册:
SD 卡的协议是一种简单的命令/响应的协议。全部命令由主机发起, SD 卡接收到命令后并返
回响应数据。根据命令的不同,返回的数据内容和长度也不同。 SD 卡命令是一个 6 字节组成的命
令包,其中第一个字节为命令号, 命令号高位 bit7 和 bit6 为固定的“01“,其它 6 个 bit 为具体
的命令号。第 2 个字节到第 5 个字节为命令参数。第 6 个字节为 7 个 bit 的 CRC 校验加 1 个 bit 的结束位。 如果在 SPI 模式的时候, CRC 校验位为可选。 如下图所示, Command 表示命令,通常使用十进制表示名称,例如 CMD17,这个时候 Command 就是十进制的 17。
对于详细的SD卡协议内容,可以参考传送门中的相关内容,给出了比较具体的解释。

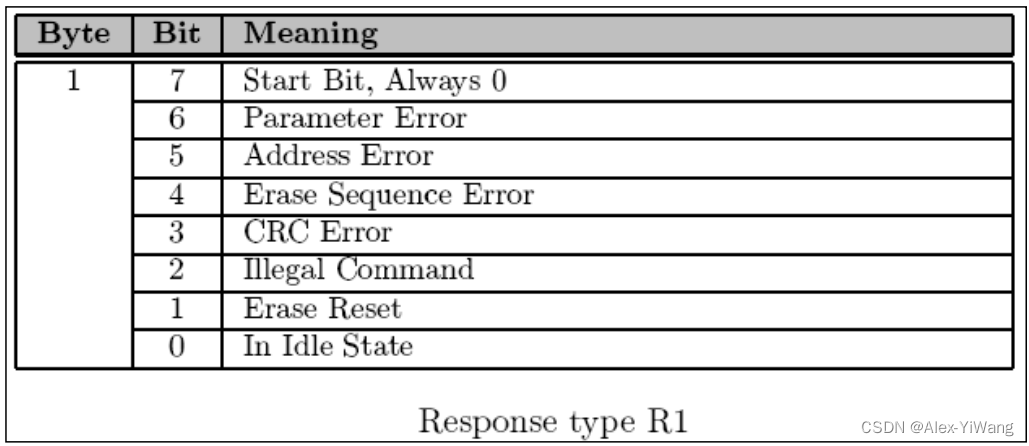
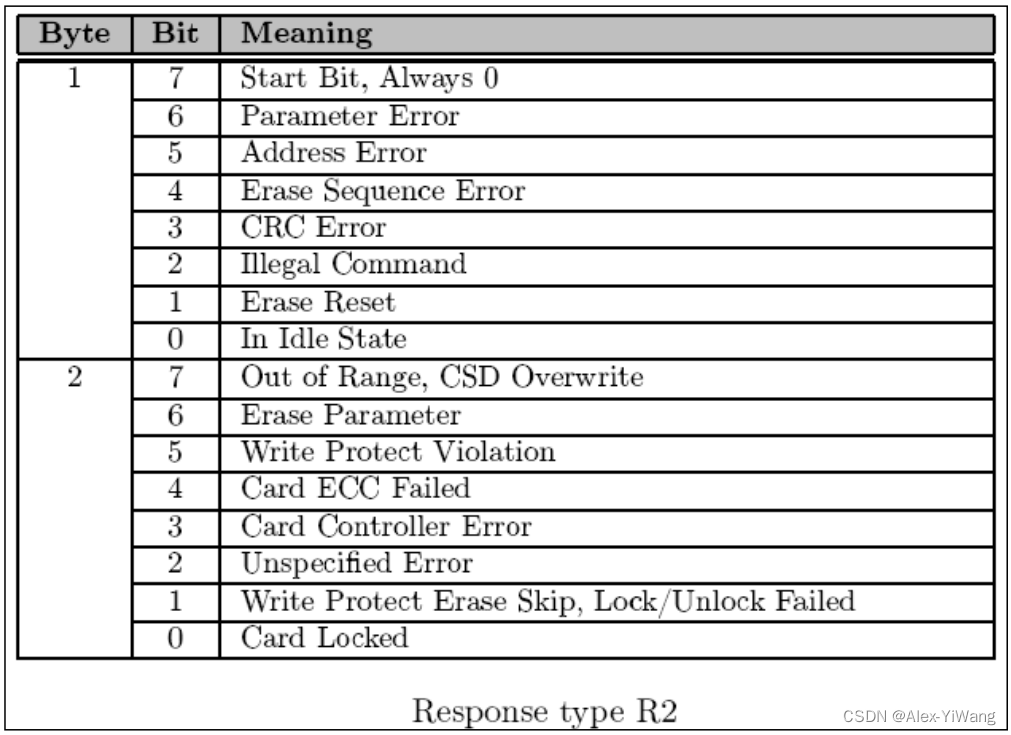
SD 卡对每个命令会返回一个响应,每个命令有一定的响应格式。响应的格式跟给它的命令号
有关。在 SPI 模式中,有三种响应格式: R1, R2, R3。

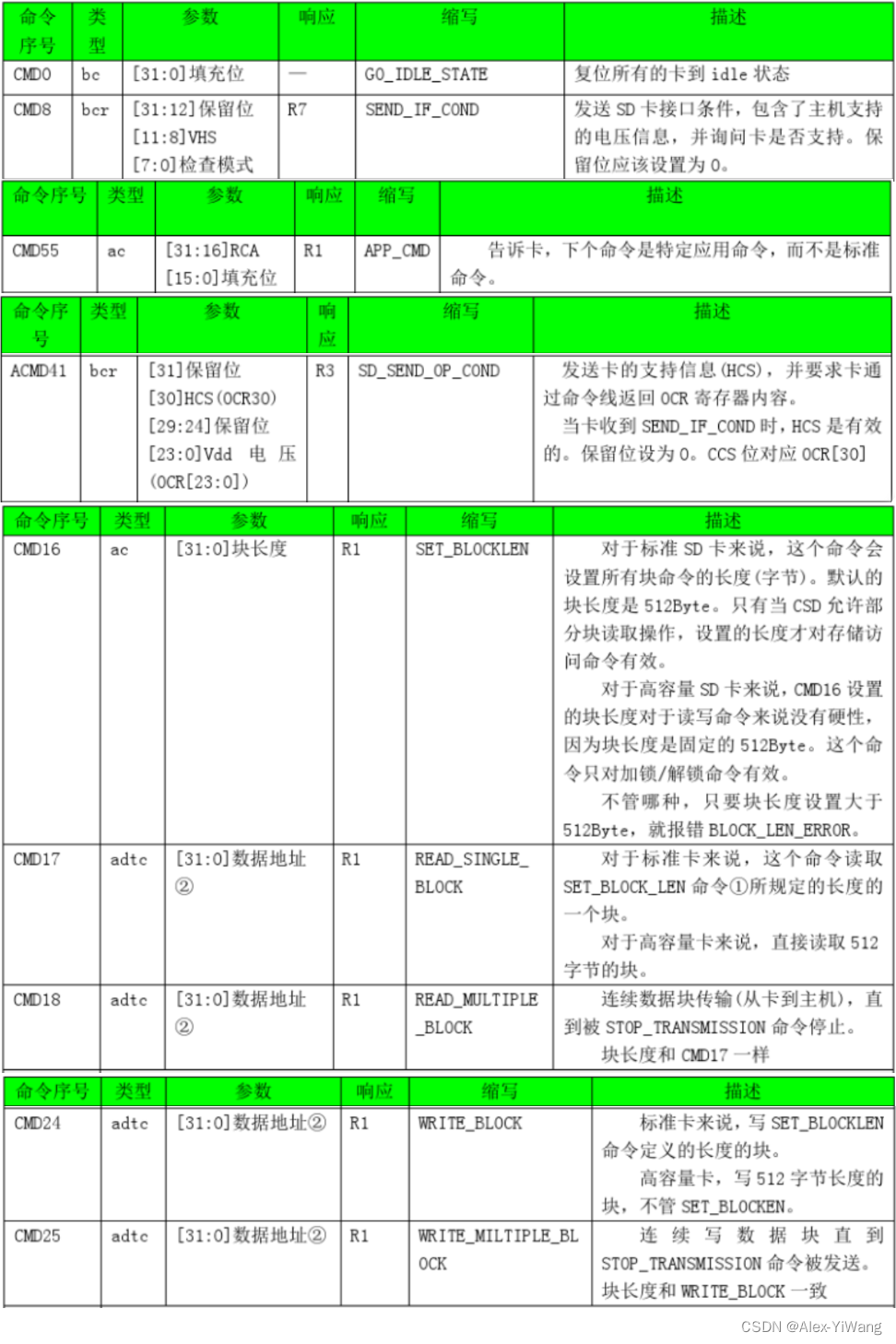
在进行SD NAND的SPI模式读写操作时,主要使用到了以下几种SD卡命令,下面的表格进行简单介绍,这里可以找到完整版:
5.2 SD卡2.0版本初始化步骤
- 上电后延时至少 74clock,等待 SD 卡内部操作完成
- 片选 CS 低电平选中 SD 卡
- 发送 CMD0,需要返回 0x01,进入 Idle 状态
- 为了区别 SD 卡是 2.0 还是 1.0,或是 MMC 卡,这里根据协议向上兼容的,首先发送只有SD2.0 才有的命令 CMD8,如果 CMD8 返回无错误,则初步判断为 2.0 卡,进一步循环发送命令 CMD55+ACMD41,直到返回 0x00,确定 SD2.0 卡
- 如果 CMD8 返回错误则判断为 1.0 卡还是 MMC 卡,循环发送 CMD55+ACMD41,返回无错误,则为 SD1.0 卡,到此 SD1.0 卡初始成功,如果在一定的循环次数下,返回为错误,则进一步发送 CMD1 进行初始化,如果返回无错误,则确定为 MMC 卡,如果在一定的次数下,返回为错误,则不能识别该卡,初始化结束。 (通过 CMD16 可以改变 SD 卡一次性读写的长度)
- CS 拉高
5.3 SD卡的读步骤
- 发送 CMD17(单块)或 CMD18(多块)读命令,返回 0X00
- 接收数据开始令牌 fe(或 fc) +正式数据 512Bytes + CRC 校验 2Bytes(默认正式传输的数据长度是 512Bytes)
5.4 SD卡的写步骤
- 发送 CMD24(单块)或 CMD25(多块)写命令,返回 0X00
- 发送数据开始令牌 fe(或 fc) +正式数据 512Bytes + CRC 校验 2Bytes
6 模块代码
本代码所实现的功能,是基于黑金AX301B,实现对SD NAND FLASH的数据写入与读取,并显示在开发板的数码管上。当按下开发板上的按键时,会自动将数据加一操作,并进行同步显示。
前文介绍的是SD NAND的协议以及初始化、读写操作的流程,下面介绍代码的组成部分,整个工程主要由以下部分模块构成:
sd_card_test(top模块)
ax_debounce:ax_debounce_m0(按键消抖模块)
sd_card_top:sd_card_top_m0(SD卡top模块)
sd_card_cmd:sd_card_cmd_m0(SD卡指令)
sd_card_sec_read_write:sd_card_sec_read_write_m0(SD卡读写)
spi_master:spi_master_m0(SPI一个字节读写)
seg_decoder:seg_decoder_m0(数码管控制)
seg_decoder:seg_decoder_m1(数码管控制)
seg_scan:seg_scan_m0(数码管控制)
下面主要介绍上述四个加粗的模块以及其功能
6.1 sd_card_top
本模块是SD card的top模块,用来实现不同子模块之间的连接。
//
// //
// //
// Author: meisq //
// [email protected] //
// ALINX(shanghai) Technology Co.,Ltd //
// heijin //
// WEB: http://www.alinx.cn/ //
// BBS: http://www.heijin.org/ //
// //
//
// //
// Copyright (c) 2017,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//
//==========================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------
// 2017/6/21 meisq 1.0 Original
//*************************************************************************/
module sd_card_top
#(
parameter SPI_LOW_SPEED_DIV = 248, // SD card low speed mode frequency division parameter,spi clk speed = clk speed /((SPI_LOW_SPEED_DIV + 2) * 2 )
parameter SPI_HIGH_SPEED_DIV = 0 // SD card high speed mode frequency division parameter,spi clk speed = clk speed /((SPI_HIGH_SPEED_DIV + 2) * 2 )
)
(
input clk,
input rst,
output SD_nCS, //SD card chip select (SPI mode)
output SD_DCLK, //SD card clock
output SD_MOSI, //SD card controller data output
input SD_MISO, //SD card controller data input
output sd_init_done, //SD card initialization is complete
input sd_sec_read, //SD card sector read
input[31:0] sd_sec_read_addr, //SD card sector read address
output[7:0] sd_sec_read_data, //SD card sector read data
output sd_sec_read_data_valid, //SD card sector read data valid
output sd_sec_read_end, //SD card sector read end
input sd_sec_write, //SD card sector write
input[31:0] sd_sec_write_addr, //SD card sector write address
input[7:0] sd_sec_write_data, //SD card sector write data
output sd_sec_write_data_req, //SD card sector write data next clock is valid
output sd_sec_write_end //SD card sector write end
);
wire[15:0] spi_clk_div; //SPI module clock division parameter
wire cmd_req; //SD card command request
wire cmd_req_ack; //SD card command request response
wire cmd_req_error; //SD card command request error
wire[47:0] cmd; //SD card command
wire[7:0] cmd_r1; //SD card expect response
wire[15:0] cmd_data_len; //SD card command read data length
wire block_read_req; //SD card sector data read request
wire block_read_valid; //SD card sector data read data valid
wire[7:0] block_read_data; //SD card sector data read data
wire block_read_req_ack; //SD card sector data read response
wire block_write_req; //SD card sector data write request
wire[7:0] block_write_data; //SD card sector data write data next clock is valid
wire block_write_data_rd; //SD card sector data write data
wire block_write_req_ack; //SD card sector data write response
wire nCS_ctrl; //SPI module chip select control
wire spi_wr_req; //SPI module data sending request
wire spi_wr_ack; //SPI module data request response
wire[7:0] spi_data_in; //SPI module send data
wire[7:0] spi_data_out; //SPI module data returned
wire[15:0] clk_div;
sd_card_sec_read_write
#(
.SPI_LOW_SPEED_DIV(SPI_LOW_SPEED_DIV),
.SPI_HIGH_SPEED_DIV(SPI_HIGH_SPEED_DIV)
)
sd_card_sec_read_write_m0(
.clk (clk ),
.rst (rst ),
.sd_init_done (sd_init_done ),
.sd_sec_read (sd_sec_read ),
.sd_sec_read_addr (sd_sec_read_addr ),
.sd_sec_read_data (sd_sec_read_data ),
.sd_sec_read_data_valid (sd_sec_read_data_valid ),
.sd_sec_read_end (sd_sec_read_end ),
.sd_sec_write (sd_sec_write ),
.sd_sec_write_addr (sd_sec_write_addr ),
.sd_sec_write_data (sd_sec_write_data ),
.sd_sec_write_data_req (sd_sec_write_data_req ),
.sd_sec_write_end (sd_sec_write_end ),
.spi_clk_div (spi_clk_div ),
.cmd_req (cmd_req ),
.cmd_req_ack (cmd_req_ack ),
.cmd_req_error (cmd_req_error ),
.cmd (cmd ),
.cmd_r1 (cmd_r1 ),
.cmd_data_len (cmd_data_len ),
.block_read_req (block_read_req ),
.block_read_valid (block_read_valid ),
.block_read_data (block_read_data ),
.block_read_req_ack (block_read_req_ack ),
.block_write_req (block_write_req ),
.block_write_data (block_write_data ),
.block_write_data_rd (block_write_data_rd ),
.block_write_req_ack (block_write_req_ack )
);
sd_card_cmd sd_card_cmd_m0(
.sys_clk (clk ),
.rst (rst ),
.spi_clk_div (spi_clk_div ),
.cmd_req (cmd_req ),
.cmd_req_ack (cmd_req_ack ),
.cmd_req_error (cmd_req_error ),
.cmd (cmd ),
.cmd_r1 (cmd_r1 ),
.cmd_data_len (cmd_data_len ),
.block_read_req (block_read_req ),
.block_read_req_ack (block_read_req_ack ),
.block_read_data (block_read_data ),
.block_read_valid (block_read_valid ),
.block_write_req (block_write_req ),
.block_write_data (block_write_data ),
.block_write_data_rd (block_write_data_rd ),
.block_write_req_ack (block_write_req_ack ),
.nCS_ctrl (nCS_ctrl ),
.clk_div (clk_div ),
.spi_wr_req (spi_wr_req ),
.spi_wr_ack (spi_wr_ack ),
.spi_data_in (spi_data_in ),
.spi_data_out (spi_data_out )
);
spi_master spi_master_m0(
.sys_clk (clk ),
.rst (rst ),
.nCS (SD_nCS ),
.DCLK (SD_DCLK ),
.MOSI (SD_MOSI ),
.MISO (SD_MISO ),
.clk_div (clk_div ),
.CPOL (1'b1 ),
.CPHA (1'b1 ),
.nCS_ctrl (nCS_ctrl ),
.wr_req (spi_wr_req ),
.wr_ack (spi_wr_ack ),
.data_in (spi_data_in ),
.data_out (spi_data_out )
);
endmodule6.2 sd_card_cmd
sd_card_cmd 模块主要实验 sd 卡基本命令操作,还有上电初始化的 88 个周期的时钟,数据
块的读写,状态机如下:
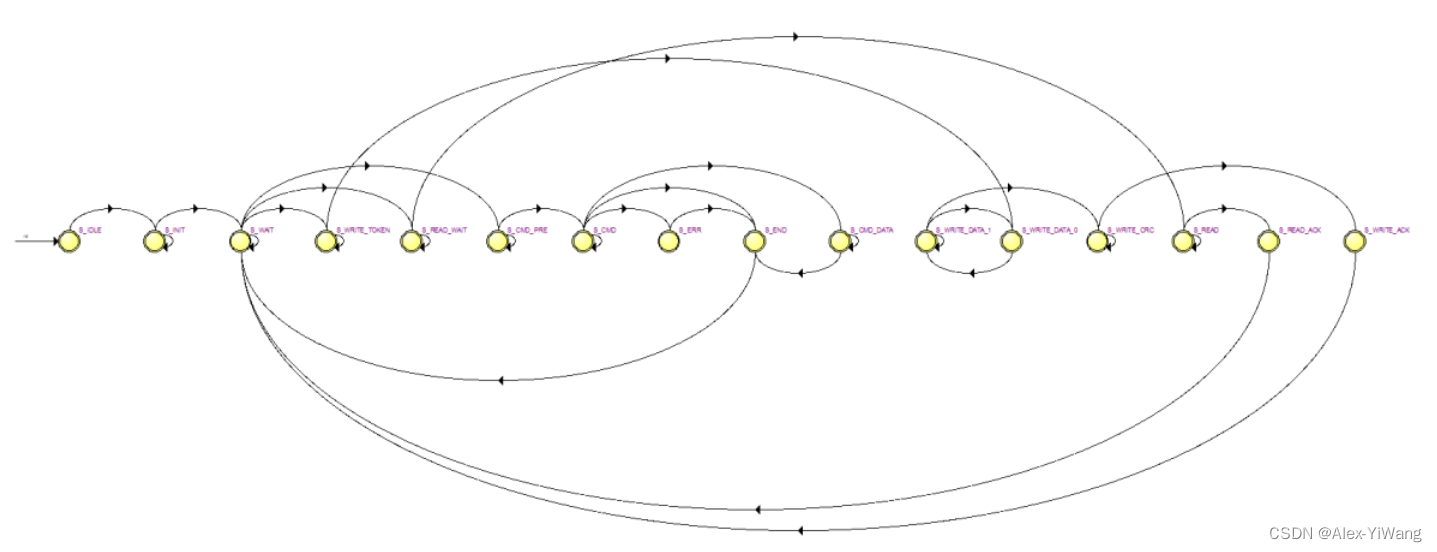
代码如下:
//
// //
// //
// Author: meisq //
// [email protected] //
// ALINX(shanghai) Technology Co.,Ltd //
// heijin //
// WEB: http://www.alinx.cn/ //
// BBS: http://www.heijin.org/ //
// //
//
// //
// Copyright (c) 2017,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//
//==========================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------
// 2017/6/21 meisq 1.0 Original
//*************************************************************************/
module sd_card_cmd(
input sys_clk,
input rst,
input[15:0] spi_clk_div, //SPI module clock division parameter
input cmd_req, //SD card command request
output cmd_req_ack, //SD card command request response
output reg cmd_req_error, //SD card command request error
input[47:0] cmd, //SD card command
input[7:0] cmd_r1, //SD card expect response
input[15:0] cmd_data_len, //SD card command read data length
input block_read_req, //SD card sector data read request
output reg block_read_valid, //SD card sector data read data valid
output reg[7:0] block_read_data, //SD card sector data read data
output block_read_req_ack, //SD card sector data read response
input block_write_req, //SD card sector data write request
input[7:0] block_write_data, //SD card sector data write data next clock is valid
output block_write_data_rd, //SD card sector data write data
output block_write_req_ack, //SD card sector data write response
output nCS_ctrl, //SPI module chip select control
output reg[15:0] clk_div,
output reg spi_wr_req, //SPI module data sending request
input spi_wr_ack, //SPI module data request response
output[7:0] spi_data_in, //SPI module send data
input[7:0] spi_data_out //SPI module data returned
);
parameter S_IDLE = 0;
parameter S_WAIT = 1;
parameter S_INIT = 2;
parameter S_CMD_PRE = 3;
parameter S_CMD = 4;
parameter S_CMD_DATA = 5;
parameter S_READ_WAIT = 6;
parameter S_READ = 7;
parameter S_READ_ACK = 8;
parameter S_WRITE_TOKEN = 9;
parameter S_WRITE_DATA_0 = 10;
parameter S_WRITE_DATA_1 = 11;
parameter S_WRITE_CRC = 12;
parameter S_WRITE_ACK = 13;
parameter S_ERR = 14;
parameter S_END = 15;
reg[3:0] state;
reg CS_reg;
reg[15:0] byte_cnt;
reg[7:0] send_data;
wire[7:0] data_recv;
reg[9:0] wr_data_cnt;
assign cmd_req_ack = (state == S_END);
assign block_read_req_ack = (state == S_READ_ACK);
assign block_write_req_ack= (state == S_WRITE_ACK);
assign block_write_data_rd = (state == S_WRITE_DATA_0);
assign spi_data_in = send_data;
assign data_recv = spi_data_out;
assign nCS_ctrl = CS_reg;
always@(posedge sys_clk or posedge rst)
begin
if(rst == 1'b1)
begin
CS_reg <= 1'b1;
spi_wr_req <= 1'b0;
byte_cnt <= 16'd0;
clk_div <= 16'd0;
send_data <= 8'hff;
state <= S_IDLE;
cmd_req_error <= 1'b0;
wr_data_cnt <= 10'd0;
end
else
case(state)
S_IDLE:
begin
state <= S_INIT;
clk_div <= spi_clk_div;
CS_reg <= 1'b1;
end
S_INIT:
begin
//send 11 bytes on power(at least 74 SPI clocks)
if(spi_wr_ack == 1'b1)
begin
if(byte_cnt >= 16'd10)
begin
byte_cnt <= 16'd0;
spi_wr_req <= 1'b0;
state <= S_WAIT;
end
begin
byte_cnt <= byte_cnt + 16'd1;
end
end
else
begin
spi_wr_req <= 1'b1;
send_data <= 8'hff;
end
end
S_WAIT:
begin
cmd_req_error <= 1'b0;
wr_data_cnt <= 10'd0;
//wait for instruction
if(cmd_req == 1'b1)
state <= S_CMD_PRE;
else if(block_read_req == 1'b1)
state <= S_READ_WAIT;
else if(block_write_req == 1'b1)
state <= S_WRITE_TOKEN;
clk_div <= spi_clk_div;
end
S_CMD_PRE:
begin
//before sending a command, send an byte 'ff',provide some clocks
if(spi_wr_ack == 1'b1)
begin
state <= S_CMD;
spi_wr_req <= 1'b0;
byte_cnt <= 16'd0;
end
else
begin
spi_wr_req <= 1'b1;
CS_reg <= 1'b1;
send_data <= 8'hff;
end
end
S_CMD:
begin
if(spi_wr_ack == 1'b1)
begin
if((byte_cnt == 16'hffff) || (data_recv != cmd_r1 && data_recv[7] == 1'b0))
begin
state <= S_ERR;
spi_wr_req <= 1'b0;
end
else if(data_recv == cmd_r1)
begin
spi_wr_req <= 1'b0;
if(cmd_data_len != 16'd0)
begin
state <= S_CMD_DATA;
byte_cnt <= 16'd0;
end
else
state <= S_END;
end
else
byte_cnt <= byte_cnt + 16'd1;
end
else
begin
spi_wr_req <= 1'b1;
CS_reg <= 1'b0;
if(byte_cnt == 16'd0)
send_data <= (cmd[47:40] | 8'h40);
else if(byte_cnt == 16'd1)
send_data <= cmd[39:32];
else if(byte_cnt == 16'd2)
send_data <= cmd[31:24];
else if(byte_cnt == 16'd3)
send_data <= cmd[23:16];
else if(byte_cnt == 16'd4)
send_data <= cmd[15:8];
else if(byte_cnt == 16'd5)
send_data <= cmd[7:0];
else
send_data <= 8'hff;
end
end
S_CMD_DATA:
begin
if(spi_wr_ack == 1'b1)
begin
if(byte_cnt == cmd_data_len - 16'd1)
begin
state <= S_END;
spi_wr_req <= 1'b0;
byte_cnt <= 16'd0;
end
else
begin
byte_cnt <= byte_cnt + 16'd1;
end
end
else
begin
spi_wr_req <= 1'b1;
send_data <= 8'hff;
end
end
S_READ_WAIT:
begin
if(spi_wr_ack == 1'b1 && data_recv == 8'hfe)
begin
spi_wr_req <= 1'b0;
state <= S_READ;
byte_cnt <= 16'd0;
end
else
begin
spi_wr_req <= 1'b1;
send_data <= 8'hff;
end
end
S_READ:
begin
if(spi_wr_ack == 1'b1)
begin
if(byte_cnt == 16'd513)
begin
state <= S_READ_ACK;
spi_wr_req <= 1'b0;
byte_cnt <= 16'd0;
end
else
begin
byte_cnt <= byte_cnt + 16'd1;
end
end
else
begin
spi_wr_req <= 1'b1;
send_data <= 8'hff;
end
end
S_WRITE_TOKEN:
if(spi_wr_ack == 1'b1)
begin
state <= S_WRITE_DATA_0;
spi_wr_req <= 1'b0;
end
else
begin
spi_wr_req <= 1'b1;
send_data <= 8'hfe;
end
S_WRITE_DATA_0:
begin
state <= S_WRITE_DATA_1;
wr_data_cnt <= wr_data_cnt + 10'd1;
end
S_WRITE_DATA_1:
begin
if(spi_wr_ack == 1'b1 && wr_data_cnt == 10'd512)
begin
state <= S_WRITE_CRC;
spi_wr_req <= 1'b0;
end
else if(spi_wr_ack == 1'b1)
begin
state <= S_WRITE_DATA_0;
spi_wr_req <= 1'b0;
end
else
begin
spi_wr_req <= 1'b1;
send_data <= block_write_data;
end
end
S_WRITE_CRC:
begin
if(spi_wr_ack == 1'b1)
begin
if(byte_cnt == 16'd2)
begin
state <= S_WRITE_ACK;
spi_wr_req <= 1'b0;
byte_cnt <= 16'd0;
end
else
begin
byte_cnt <= byte_cnt + 16'd1;
end
end
else
begin
spi_wr_req <= 1'b1;
send_data <= 8'hff;
end
end
S_ERR:
begin
state <= S_END;
cmd_req_error <= 1'b1;
end
S_READ_ACK,S_WRITE_ACK,S_END:
begin
state <= S_WAIT;
end
default:
state <= S_IDLE;
endcase
end
always@(posedge sys_clk or posedge rst)
begin
if(rst == 1'b1)
block_read_valid <= 1'b0;
else if(state == S_READ && byte_cnt < 16'd512)
block_read_valid <= spi_wr_ack;
else
block_read_valid <= 1'b0;
end
always@(posedge sys_clk or posedge rst)
begin
if(rst == 1'b1)
block_read_data <= 8'd0;
else if(state == S_READ && spi_wr_ack == 1'b1)
block_read_data <= data_recv;
end
endmodule6.3 sd_card_sec_read_write
sd_card_sec_read_write 模块继续完成 SD 卡初始化,然后等待扇区读写指令,并完成扇区的
读写操作。 下图为模块的状态机转换图,首先发送 CMD0 命令,然后发送 CMD8 命令,再发送
CMD55,接着发送 ACMD41,如果应答正常, sd 卡初始化完成,等待扇区的读写。

代码如下:
//
// //
// //
// Author: meisq //
// [email protected] //
// ALINX(shanghai) Technology Co.,Ltd //
// heijin //
// WEB: http://www.alinx.cn/ //
// BBS: http://www.heijin.org/ //
// //
//
// //
// Copyright (c) 2017,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//
//===============================================================================
// Revision History:
// Date By Revision Change Description
//-------------------------------------------------------------------------------
// 2017/6/21 meisq 1.0 Original
//*******************************************************************************/
module sd_card_sec_read_write
#(
parameter SPI_LOW_SPEED_DIV = 248, // spi clk speed = clk speed /((SPI_LOW_SPEED_DIV + 2) * 2 )
parameter SPI_HIGH_SPEED_DIV = 0 // spi clk speed = clk speed /((SPI_HIGH_SPEED_DIV + 2) * 2 )
)
(
input clk,
input rst,
output reg sd_init_done,
input sd_sec_read,
input[31:0] sd_sec_read_addr,
output[7:0] sd_sec_read_data,
output sd_sec_read_data_valid,
output sd_sec_read_end,
input sd_sec_write,
input[31:0] sd_sec_write_addr,
input[7:0] sd_sec_write_data,
output sd_sec_write_data_req,
output sd_sec_write_end,
output reg[15:0] spi_clk_div,
output reg cmd_req,
input cmd_req_ack,
input cmd_req_error,
output reg[47:0] cmd,
output reg[7:0] cmd_r1,
output reg[15:0] cmd_data_len,
output reg block_read_req,
input block_read_valid,
input[7:0] block_read_data,
input block_read_req_ack,
output reg block_write_req,
output[7:0] block_write_data,
input block_write_data_rd,
input block_write_req_ack
);
reg[7:0] read_data;
reg[31:0] timer;
localparam S_IDLE = 0;
localparam S_CMD0 = 1;
localparam S_CMD8 = 2;
localparam S_CMD55 = 3;
localparam S_CMD41 = 4;
localparam S_CMD17 = 5;
localparam S_READ = 6;
localparam S_CMD24 = 7;
localparam S_WRITE = 8;
localparam S_ERR = 14;
localparam S_WRITE_END = 15;
localparam S_READ_END = 16;
localparam S_WAIT_READ_WRITE = 17;
localparam S_CMD16 = 18;
reg[4:0] state;
reg[31:0] sec_addr;
assign sd_sec_read_data_valid = (state == S_READ) && block_read_valid;
assign sd_sec_read_data = block_read_data;
assign sd_sec_read_end = (state == S_READ_END);
assign sd_sec_write_data_req = (state == S_WRITE) && block_write_data_rd;
assign block_write_data = sd_sec_write_data;
assign sd_sec_write_end = (state == S_WRITE_END);
always@(posedge clk or posedge rst)
begin
if(rst == 1'b1)
begin
state <= S_IDLE;
cmd_req <= 1'b0;
cmd_data_len <= 16'd0;
cmd_r1 <= 8'd0;
cmd <= 48'd0;
spi_clk_div <= SPI_LOW_SPEED_DIV[15:0];
block_write_req <= 1'b0;
block_read_req <= 1'b0;
sec_addr <= 32'd0;
sd_init_done <= 1'b0;
end
else
case(state)
S_IDLE:
begin
state <= S_CMD0;
sd_init_done <= 1'b0;
spi_clk_div <= SPI_LOW_SPEED_DIV[15:0];
end
S_CMD0:
begin
if(cmd_req_ack & ~cmd_req_error)
begin
state <= S_CMD8;
cmd_req <= 1'b0;
end
else
begin
cmd_req <= 1'b1;
cmd_data_len <= 16'd0;
cmd_r1 <= 8'h01;
cmd <= {8'd0,8'h00,8'h00,8'h00,8'h00,8'h95};
end
end
S_CMD8:
begin
if(cmd_req_ack & ~cmd_req_error)
begin
state <= S_CMD55;
cmd_req <= 1'b0;
end
else
begin
cmd_req <= 1'b1;
cmd_data_len <= 16'd4;
cmd_r1 <= 8'h01;
cmd <= {8'd8,8'h00,8'h00,8'h01,8'haa,8'h87};
end
end
S_CMD55:
begin
if(cmd_req_ack & ~cmd_req_error)
begin
state <= S_CMD41;
cmd_req <= 1'b0;
end
else
begin
cmd_req <= 1'b1;
cmd_data_len <= 16'd0;
cmd_r1 <= 8'h01;
cmd <= {8'd55,8'h00,8'h00,8'h00,8'h00,8'hff};
end
end
S_CMD41:
begin
if(cmd_req_ack & ~cmd_req_error)
begin
state <= S_CMD16;
cmd_req <= 1'b0;
sd_init_done <= 1'b1;
spi_clk_div <= SPI_HIGH_SPEED_DIV[15:0];
end
else if(cmd_req_ack)
begin
state <= S_CMD55;
end
else
begin
cmd_req <= 1'b1;
cmd_data_len <= 16'd0;
cmd_r1 <= 8'h00;
cmd <= {8'd41,8'h40,8'h00,8'h00,8'h00,8'hff};
end
end
S_CMD16:
begin
if(cmd_req_ack & ~cmd_req_error)
begin
state <= S_WAIT_READ_WRITE;
cmd_req <= 1'b0;
sd_init_done <= 1'b1;
spi_clk_div <= SPI_HIGH_SPEED_DIV[15:0];
end
else if(cmd_req_ack)
begin
state <= S_CMD55;
end
else
begin
cmd_req <= 1'b1;
cmd_data_len <= 16'd0;
cmd_r1 <= 8'h00;
cmd <= {8'd16,32'd512,8'hff};
end
end
S_WAIT_READ_WRITE:
begin
if(sd_sec_write == 1'b1)
begin
state <= S_CMD24;
sec_addr <= sd_sec_write_addr;
end
else if(sd_sec_read == 1'b1)
begin
state <= S_CMD17;
sec_addr <= sd_sec_read_addr;
end
spi_clk_div <= 16'd0;
end
S_CMD24:
begin
if(cmd_req_ack & ~cmd_req_error)
begin
state <= S_WRITE;
cmd_req <= 1'b0;
end
else
begin
cmd_req <= 1'b1;
cmd_data_len <= 16'd0;
cmd_r1 <= 8'h00;
cmd <= {8'd24,sec_addr,8'hff};
end
end
S_WRITE:
begin
if(block_write_req_ack == 1'b1)
begin
block_write_req <= 1'b0;
state <= S_WRITE_END;
end
else
block_write_req <= 1'b1;
end
S_CMD17:
begin
if(cmd_req_ack & ~cmd_req_error)
begin
state <= S_READ;
cmd_req <= 1'b0;
end
else
begin
cmd_req <= 1'b1;
cmd_data_len <= 16'd0;
cmd_r1 <= 8'h00;
cmd <= {8'd17,sec_addr,8'hff};
end
end
S_READ:
begin
if(block_read_req_ack)
begin
state <= S_READ_END;
block_read_req <= 1'b0;
end
else
begin
block_read_req <= 1'b1;
end
end
S_WRITE_END:
begin
state <= S_WAIT_READ_WRITE;
end
S_READ_END:
begin
state <= S_WAIT_READ_WRITE;
end
default:
state <= S_IDLE;
endcase
end
endmodule6.4 spi_master
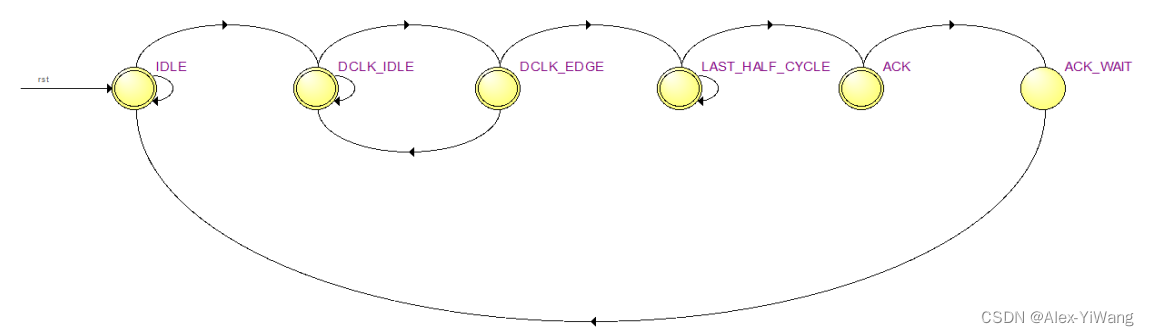
这一模块用来完成SPI一个字节的读写。
spi master 状态机设计, 主要完成一个字节 spi 数据的读写,由于是全双工的,写一个字节的
同时也读一个字节。 首先空闲状态“IDLE”接收到写请求后进入“DCLK_IDLE”状态,这个状态为
spi 时钟沿变化保持一定的时间,用来控制 spi 时钟的周期,然后进入 spi 时钟沿的变化状态,一
个字节上升沿和下降沿一共 16 个数据沿。 在最后一个数据沿进入“LAST_HALF_CYCLE”状态,为
让最后一个沿也保持一定的时间,再进入应答状态,完成一次写请求。spi_master 模块中模拟了一个 spi 时钟,在状态机进入到‘DCLK_EDGE’时进行翻转。状态机图示如下:
代码如下:
//
// //
// //
// Author: meisq //
// [email protected] //
// ALINX(shanghai) Technology Co.,Ltd //
// heijin //
// WEB: http://www.alinx.cn/ //
// BBS: http://www.heijin.org/ //
// //
//
// //
// Copyright (c) 2017,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//
//==========================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------
// 2017/6/19 meisq 1.0 Original
//*************************************************************************/
module spi_master
(
input sys_clk,
input rst,
output nCS, //chip select (SPI mode)
output DCLK, //spi clock
output MOSI, //spi data output
input MISO, //spi input
input CPOL,
input CPHA,
input nCS_ctrl,
input[15:0] clk_div,
input wr_req,
output wr_ack,
input[7:0] data_in,
output[7:0] data_out
);
localparam IDLE = 0;
localparam DCLK_EDGE = 1;
localparam DCLK_IDLE = 2;
localparam ACK = 3;
localparam LAST_HALF_CYCLE = 4;
localparam ACK_WAIT = 5;
reg DCLK_reg;
reg[7:0] MOSI_shift;
reg[7:0] MISO_shift;
reg[2:0] state;
reg[2:0] next_state;
reg [15:0] clk_cnt;
reg[4:0] clk_edge_cnt;
assign MOSI = MOSI_shift[7];
assign DCLK = DCLK_reg;
assign data_out = MISO_shift;
assign wr_ack = (state == ACK);
assign nCS = nCS_ctrl;
always@(posedge sys_clk or posedge rst)
begin
if(rst)
state <= IDLE;
else
state <= next_state;
end
always@(*)
begin
case(state)
IDLE:
if(wr_req == 1'b1)
next_state <= DCLK_IDLE;
else
next_state <= IDLE;
DCLK_IDLE:
//half a SPI clock cycle produces a clock edge
if(clk_cnt == clk_div)
next_state <= DCLK_EDGE;
else
next_state <= DCLK_IDLE;
DCLK_EDGE:
//a SPI byte with a total of 16 clock edges
if(clk_edge_cnt == 5'd15)
next_state <= LAST_HALF_CYCLE;
else
next_state <= DCLK_IDLE;
//this is the last data edge
LAST_HALF_CYCLE:
if(clk_cnt == clk_div)
next_state <= ACK;
else
next_state <= LAST_HALF_CYCLE;
//send one byte complete
ACK:
next_state <= ACK_WAIT;
//wait for one clock cycle, to ensure that the cancel request signal
ACK_WAIT:
next_state <= IDLE;
default:
next_state <= IDLE;
endcase
end
always@(posedge sys_clk or posedge rst)
begin
if(rst)
DCLK_reg <= 1'b0;
else if(state == IDLE)
DCLK_reg <= CPOL;
else if(state == DCLK_EDGE)
DCLK_reg <= ~DCLK_reg;//SPI clock edge
end
//SPI clock wait counter
always@(posedge sys_clk or posedge rst)
begin
if(rst)
clk_cnt <= 16'd0;
else if(state == DCLK_IDLE || state == LAST_HALF_CYCLE)
clk_cnt <= clk_cnt + 16'd1;
else
clk_cnt <= 16'd0;
end
//SPI clock edge counter
always@(posedge sys_clk or posedge rst)
begin
if(rst)
clk_edge_cnt <= 5'd0;
else if(state == DCLK_EDGE)
clk_edge_cnt <= clk_edge_cnt + 5'd1;
else if(state == IDLE)
clk_edge_cnt <= 5'd0;
end
//SPI data output
always@(posedge sys_clk or posedge rst)
begin
if(rst)
MOSI_shift <= 8'd0;
else if(state == IDLE && wr_req)
MOSI_shift <= data_in;
else if(state == DCLK_EDGE)
if(CPHA == 1'b0 && clk_edge_cnt[0] == 1'b1)
MOSI_shift <= {MOSI_shift[6:0],MOSI_shift[7]};
else if(CPHA == 1'b1 && (clk_edge_cnt != 5'd0 && clk_edge_cnt[0] == 1'b0))
MOSI_shift <= {MOSI_shift[6:0],MOSI_shift[7]};
end
//SPI data input
always@(posedge sys_clk or posedge rst)
begin
if(rst)
MISO_shift <= 8'd0;
else if(state == IDLE && wr_req)
MISO_shift <= 8'h00;
else if(state == DCLK_EDGE)
if(CPHA == 1'b0 && clk_edge_cnt[0] == 1'b0)
MISO_shift <= {MISO_shift[6:0],MISO};
else if(CPHA == 1'b1 && (clk_edge_cnt[0] == 1'b1))
MISO_shift <= {MISO_shift[6:0],MISO};
end
endmodule6.5 其余代码
6.5.1 sd_card_test
//
// //
// //
// Author: meisq //
// [email protected] //
// ALINX(shanghai) Technology Co.,Ltd //
// heijin //
// WEB: http://www.alinx.cn/ //
// BBS: http://www.heijin.org/ //
// //
//
// //
// Copyright (c) 2017,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//
//================================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------------
// 2017/6/19 meisq 1.0 Original
//*******************************************************************************/
module sd_card_test(
input clk,
input rst_n,
input key1,
output SD_nCS,
output SD_DCLK,
output SD_MOSI,
input SD_MISO,
output [5:0] seg_sel,
output [7:0] seg_data
);
parameter S_IDLE = 0;
parameter S_READ = 1;
parameter S_WRITE = 2;
parameter S_END = 3;
reg[3:0] state;
wire sd_init_done;
reg sd_sec_read;
wire[31:0] sd_sec_read_addr;
wire[7:0] sd_sec_read_data;
wire sd_sec_read_data_valid;
wire sd_sec_read_end;
reg sd_sec_write;
wire[31:0] sd_sec_write_addr;
reg [7:0] sd_sec_write_data;
wire sd_sec_write_data_req;
wire sd_sec_write_end;
reg[9:0] wr_cnt;
reg[9:0] rd_cnt;
wire button_negedge;
reg[7:0] read_data;
ax_debounce ax_debounce_m0
(
.clk (clk),
.rst (~rst_n),
.button_in (key1),
.button_posedge (),
.button_negedge (button_negedge),
.button_out ()
);
wire[6:0] seg_data_0;
seg_decoder seg_decoder_m0(
.bin_data (read_data[3:0]),
.seg_data (seg_data_0)
);
wire[6:0] seg_data_1;
seg_decoder seg_decoder_m1(
.bin_data (read_data[7:4]),
.seg_data (seg_data_1)
);
seg_scan seg_scan_m0(
.clk (clk),
.rst_n (rst_n),
.seg_sel (seg_sel),
.seg_data (seg_data),
.seg_data_0 ({1'b1,7'b1111_111}),
.seg_data_1 ({1'b1,7'b1111_111}),
.seg_data_2 ({1'b1,7'b1111_111}),
.seg_data_3 ({1'b1,7'b1111_111}),
.seg_data_4 ({1'b1,seg_data_1}),
.seg_data_5 ({sd_init_done,seg_data_0})
);
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
wr_cnt <= 10'd0;
else if(state == S_WRITE)
begin
if(sd_sec_write_data_req == 1'b1)
wr_cnt <= wr_cnt + 10'd1;
end
else
wr_cnt <= 10'd0;
end
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
rd_cnt <= 10'd0;
else if(state == S_READ)
begin
if(sd_sec_read_data_valid == 1'b1)
rd_cnt <= rd_cnt + 10'd1;
end
else
rd_cnt <= 10'd0;
end
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
read_data <= 8'd0;
else if(state == S_READ)
begin
if(sd_sec_read_data_valid == 1'b1 && rd_cnt == 10'd0)
read_data <= sd_sec_read_data;
end
else if(state == S_END && button_negedge == 1'b1)
read_data <= read_data + 8'd1;
end
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
sd_sec_write_data <= 8'd0;
else if(sd_sec_write_data_req)
sd_sec_write_data <= read_data + wr_cnt[7:0];
end
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
begin
state <= S_IDLE;
sd_sec_read <= 1'b0;
sd_sec_write <= 1'b0;
end
else if(sd_init_done == 1'b0)
begin
state <= S_IDLE;
end
else
case(state)
S_IDLE:
begin
state <= S_READ;
end
S_WRITE:
begin
if(sd_sec_write_end == 1'b1)
begin
sd_sec_write <= 1'b0;
state <= S_READ;
end
else
sd_sec_write <= 1'b1;
end
S_READ:
begin
if(sd_sec_read_end == 1'b1)
begin
state <= S_END;
sd_sec_read <= 1'b0;
end
else
begin
sd_sec_read <= 1'b1;
end
end
S_END:
begin
if(button_negedge == 1'b1)
state <= S_WRITE;
end
default:
state <= S_IDLE;
endcase
end
sd_card_top sd_card_top_m0(
.clk (clk ),
.rst (~rst_n ),
.SD_nCS (SD_nCS ),
.SD_DCLK (SD_DCLK ),
.SD_MOSI (SD_MOSI ),
.SD_MISO (SD_MISO ),
.sd_init_done (sd_init_done ),
.sd_sec_read (sd_sec_read ),
.sd_sec_read_addr (sd_sec_read_addr ),
.sd_sec_read_data (sd_sec_read_data ),
.sd_sec_read_data_valid (sd_sec_read_data_valid ),
.sd_sec_read_end (sd_sec_read_end ),
.sd_sec_write (sd_sec_write ),
.sd_sec_write_addr (sd_sec_write_addr ),
.sd_sec_write_data (sd_sec_write_data ),
.sd_sec_write_data_req (sd_sec_write_data_req ),
.sd_sec_write_end (sd_sec_write_end )
);
endmodule 6.5.2 ax_debounce
//
// //
// //
// Author: meisq //
// [email protected] //
// ALINX(shanghai) Technology Co.,Ltd //
// heijin //
// WEB: http://www.alinx.cn/ //
// BBS: http://www.heijin.org/ //
// //
//
// //
// Copyright (c) 2017,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//
//================================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------------
// 2017/5/3 meisq 1.0 Original
//*******************************************************************************/
`timescale 1 ns / 100 ps
module ax_debounce
(
input clk,
input rst,
input button_in,
output reg button_posedge,
output reg button_negedge,
output reg button_out
);
---------------- internal constants --------------
parameter N = 32 ; // debounce timer bitwidth
parameter FREQ = 50; //model clock :Mhz
parameter MAX_TIME = 20; //ms
localparam TIMER_MAX_VAL = MAX_TIME * 1000 * FREQ;
---------------- internal variables ---------------
reg [N-1 : 0] q_reg; // timing regs
reg [N-1 : 0] q_next;
reg DFF1, DFF2; // input flip-flops
wire q_add; // control flags
wire q_reset;
reg button_out_d0;
------------------------------------------------------
contenious assignment for counter control
assign q_reset = (DFF1 ^ DFF2); // xor input flip flops to look for level chage to reset counter
assign q_add = ~(q_reg == TIMER_MAX_VAL); // add to counter when q_reg msb is equal to 0
combo counter to manage q_next
always @ ( q_reset, q_add, q_reg)
begin
case( {q_reset , q_add})
2'b00 :
q_next <= q_reg;
2'b01 :
q_next <= q_reg + 1;
default :
q_next <= { N {1'b0} };
endcase
end
Flip flop inputs and q_reg update
always @ ( posedge clk or posedge rst)
begin
if(rst == 1'b1)
begin
DFF1 <= 1'b0;
DFF2 <= 1'b0;
q_reg <= { N {1'b0} };
end
else
begin
DFF1 <= button_in;
DFF2 <= DFF1;
q_reg <= q_next;
end
end
counter control
always @ ( posedge clk or posedge rst)
begin
if(rst == 1'b1)
button_out <= 1'b1;
else if(q_reg == TIMER_MAX_VAL)
button_out <= DFF2;
else
button_out <= button_out;
end
always @ ( posedge clk or posedge rst)
begin
if(rst == 1'b1)
begin
button_out_d0 <= 1'b1;
button_posedge <= 1'b0;
button_negedge <= 1'b0;
end
else
begin
button_out_d0 <= button_out;
button_posedge <= ~button_out_d0 & button_out;
button_negedge <= button_out_d0 & ~button_out;
end
end
endmodule6.5.3 seg_decoder
//
// //
// //
// Author: meisq //
// [email protected] //
// ALINX(shanghai) Technology Co.,Ltd //
// heijin //
// WEB: http://www.alinx.cn/ //
// BBS: http://www.heijin.org/ //
// //
//
// //
// Copyright (c) 2017,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//
//==========================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------
// 2017/6/19 meisq 1.0 Original
//*************************************************************************/
module seg_decoder
(
input[3:0] bin_data, // bin data input
output reg[6:0] seg_data // seven segments LED output
);
always@(*)
begin
case(bin_data)
4'd0:seg_data <= 7'b100_0000;
4'd1:seg_data <= 7'b111_1001;
4'd2:seg_data <= 7'b010_0100;
4'd3:seg_data <= 7'b011_0000;
4'd4:seg_data <= 7'b001_1001;
4'd5:seg_data <= 7'b001_0010;
4'd6:seg_data <= 7'b000_0010;
4'd7:seg_data <= 7'b111_1000;
4'd8:seg_data <= 7'b000_0000;
4'd9:seg_data <= 7'b001_0000;
4'ha:seg_data <= 7'b000_1000;
4'hb:seg_data <= 7'b000_0011;
4'hc:seg_data <= 7'b100_0110;
4'hd:seg_data <= 7'b010_0001;
4'he:seg_data <= 7'b000_0110;
4'hf:seg_data <= 7'b000_1110;
default:seg_data <= 7'b111_1111;
endcase
end
endmodule6.5.4 seg_scan
//
// //
// //
// Author: meisq //
// [email protected] //
// ALINX(shanghai) Technology Co.,Ltd //
// heijin //
// WEB: http://www.alinx.cn/ //
// BBS: http://www.heijin.org/ //
// //
//
// //
// Copyright (c) 2017,ALINX(shanghai) Technology Co.,Ltd //
// All rights reserved //
// //
// This source file may be used and distributed without restriction provided //
// that this copyright statement is not removed from the file and that any //
// derivative work contains the original copyright notice and the associated //
// disclaimer. //
// //
//
//==========================================================================
// Revision History:
// Date By Revision Change Description
//--------------------------------------------------------------------------
// 2017/6/19 meisq 1.0 Original
//*************************************************************************/
module seg_scan(
input clk,
input rst_n,
output reg[5:0] seg_sel, //digital led chip select
output reg[7:0] seg_data, //eight segment digital tube output,MSB is the decimal point
input[7:0] seg_data_0,
input[7:0] seg_data_1,
input[7:0] seg_data_2,
input[7:0] seg_data_3,
input[7:0] seg_data_4,
input[7:0] seg_data_5
);
parameter SCAN_FREQ = 200; //scan frequency
parameter CLK_FREQ = 50000000; //clock frequency
parameter SCAN_COUNT = CLK_FREQ /(SCAN_FREQ * 6) - 1;
reg[31:0] scan_timer; //scan time counter
reg[3:0] scan_sel; //Scan select counter
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
begin
scan_timer <= 32'd0;
scan_sel <= 4'd0;
end
else if(scan_timer >= SCAN_COUNT)
begin
scan_timer <= 32'd0;
if(scan_sel == 4'd5)
scan_sel <= 4'd0;
else
scan_sel <= scan_sel + 4'd1;
end
else
begin
scan_timer <= scan_timer + 32'd1;
end
end
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
begin
seg_sel <= 6'b111111;
seg_data <= 8'hff;
end
else
begin
case(scan_sel)
//first digital led
4'd0:
begin
seg_sel <= 6'b11_1110;
seg_data <= seg_data_0;
end
//second digital led
4'd1:
begin
seg_sel <= 6'b11_1101;
seg_data <= seg_data_1;
end
//...
4'd2:
begin
seg_sel <= 6'b11_1011;
seg_data <= seg_data_2;
end
4'd3:
begin
seg_sel <= 6'b11_0111;
seg_data <= seg_data_3;
end
4'd4:
begin
seg_sel <= 6'b10_1111;
seg_data <= seg_data_4;
end
4'd5:
begin
seg_sel <= 6'b01_1111;
seg_data <= seg_data_5;
end
default:
begin
seg_sel <= 6'b11_1111;
seg_data <= 8'hff;
end
endcase
end
end
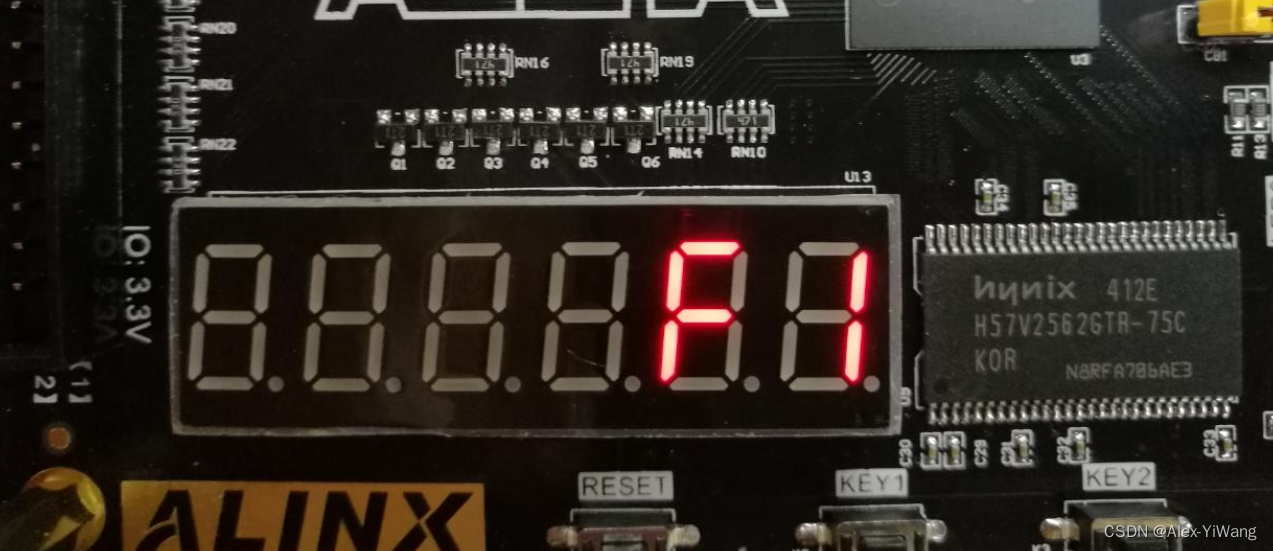
endmodule7 实验结果
下载实验程序后,可以看到数码管显示一个数字,这个数字是存储在 sd 卡中第一扇区的第一
个数据,数据是随机的,这个时候按键 KEY1 按下,数字加一,并写入了 sd 卡,再次下载程序,
可以看到直接显示更新后的数据。

8 参考资料
【1】百度百科:EEPROM
【4】黑金社区
【5】基于FPGA的SD卡的数据读写实现(SD NAND FLASH)
需要工程文件(Quartus工程文件)的小伙伴也可以在公众号“Alex的书桌与实验室”回复“1SD”获取下载链接~
这就是本期的全部内容啦,如果你喜欢我的文章,不要忘了点赞+收藏+关注,分享给身边的朋友哇~