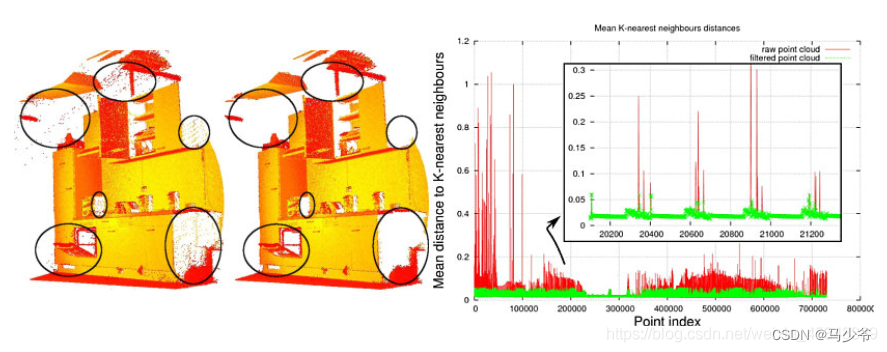
离群点的移除
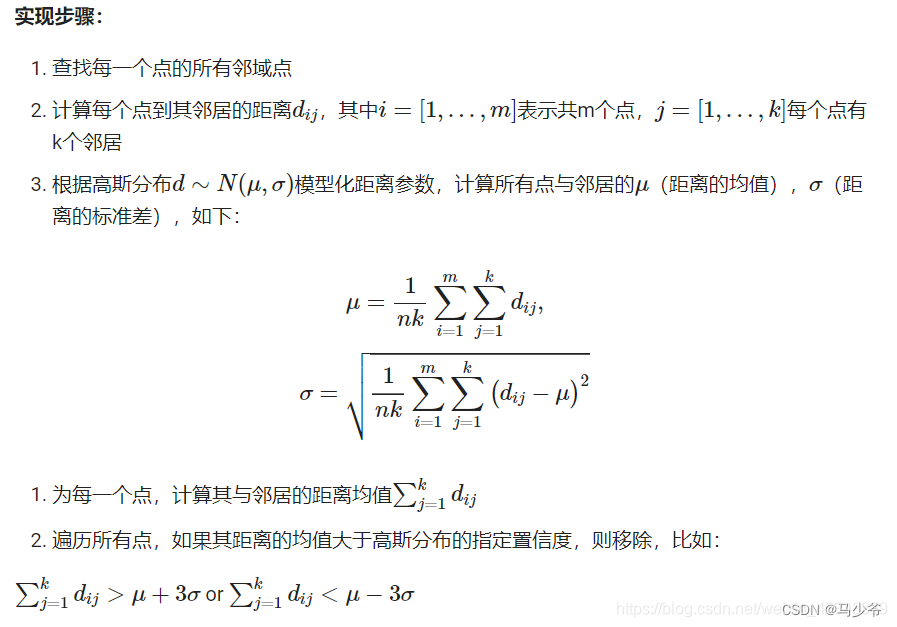
统计学移除法
// 创建过滤器,每个点分析计算时考虑的最近邻居个数为50个;
// 设置标准差阈值为1,这意味着所有距离查询点的平均距离的标准偏差均大于1个标准偏差的所有点都将被标记为离群值并删除。
// 计算输出并将其存储在cloud_filtered中
// 创建滤波对象
pcl::StatisticalOutlierRemoval<pcl::PointXYZ> sor;
sor.setInputCloud (cloud);
// 设置平均距离估计的最近邻居的数量K
sor.setMeanK (50);
// 设置标准差阈值系数,值越小,滤波效果越强
sor.setStddevMulThresh (1.0);
// sor.setNegative(True); 滤波器取反
// 执行过滤
sor.filter (*cloud_filtered);
条件移除法
半径移除法:指定半径内续有n个邻点才保留,否则移除
pcl::RadiusOutlierRemoval<pcl::PointXYZ> outrem;
// build the filter
outrem.setInputCloud(cloud);
outrem.setRadiusSearch(0.4);
outrem.setMinNeighborsInRadius(2);
// apply filter
outrem.filter(*cloud_filtered);
条件移除法:
// build the condition 或的写法:pcl::ConditionOr<pcl::PointXYZ>::Ptr
pcl::ConditionAnd<pcl::PointXYZ>::Ptr range_cond(new pcl::ConditionAnd<pcl::PointXYZ>());
// GT大于0 小于0.8 的范围内的点 保留
range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(
new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::GT, 0.0)));
range_cond->addComparison(pcl::FieldComparison<pcl::PointXYZ>::ConstPtr(
new pcl::FieldComparison<pcl::PointXYZ>("z", pcl::ComparisonOps::LT, 0.8)));
// build the filter
pcl::ConditionalRemoval<pcl::PointXYZ> condrem;
condrem.setCondition(range_cond);
condrem.setInputCloud(cloud);
condrem.setKeepOrganized(true);
// apply filter
condrem.filter(*cloud_filtered);