

Whaaat?
最近,Ubuntu 22.04 LTS发布,看了看其新特性,没想到还有些有意思的新功能, 其中之一便是对树莓派4 2GB安装Desktop版本的支持,其实之前Ubuntu已经支持安装Desktop版,但仅支持树莓派4 4GB以上的版本。因为4GB的价位已经不低,就更倾向于选用Jetson Nano了,所以手边并没有树莓派4 4GB,也就没有测试过。本来近一段时间以来,树莓派的价格蹭蹭蹭的往上涨,都没有太多动力基于其做相关应用了。不过手边恰好就有树莓派4 2GB,测测也很快,不如尝个鲜。那么树莓派4 2GB直接安装最新的Ubuntu 22.04 LTS Desktop效果究竟怎样?

速测
赶紧安装上体验一下,既感受下Ubuntu最新系统,也看看树莓派的运行情况,作为机器人研发者,让我们安装ROS2最新版来看看,因此可以说是一举三得。话不多说,让我们来快速测试一下。
下载镜像、制作系统安装盘、安装、设置,一顿常规操作之后,来啦:
Ubuntu 22.04 Desktop
让我们先来看看我比较喜欢的新的截图录屏工具,有了这个工具基本不需要另外安装相关工具了,方便快捷,截全屏、截窗口、自定义都可并且同样适用于录屏。本文其它图片都是使用的这个小工具,除了下面这张介绍其本身的,此图来自OMG! Ubuntu!,好像这个工具并不能给自己截图。
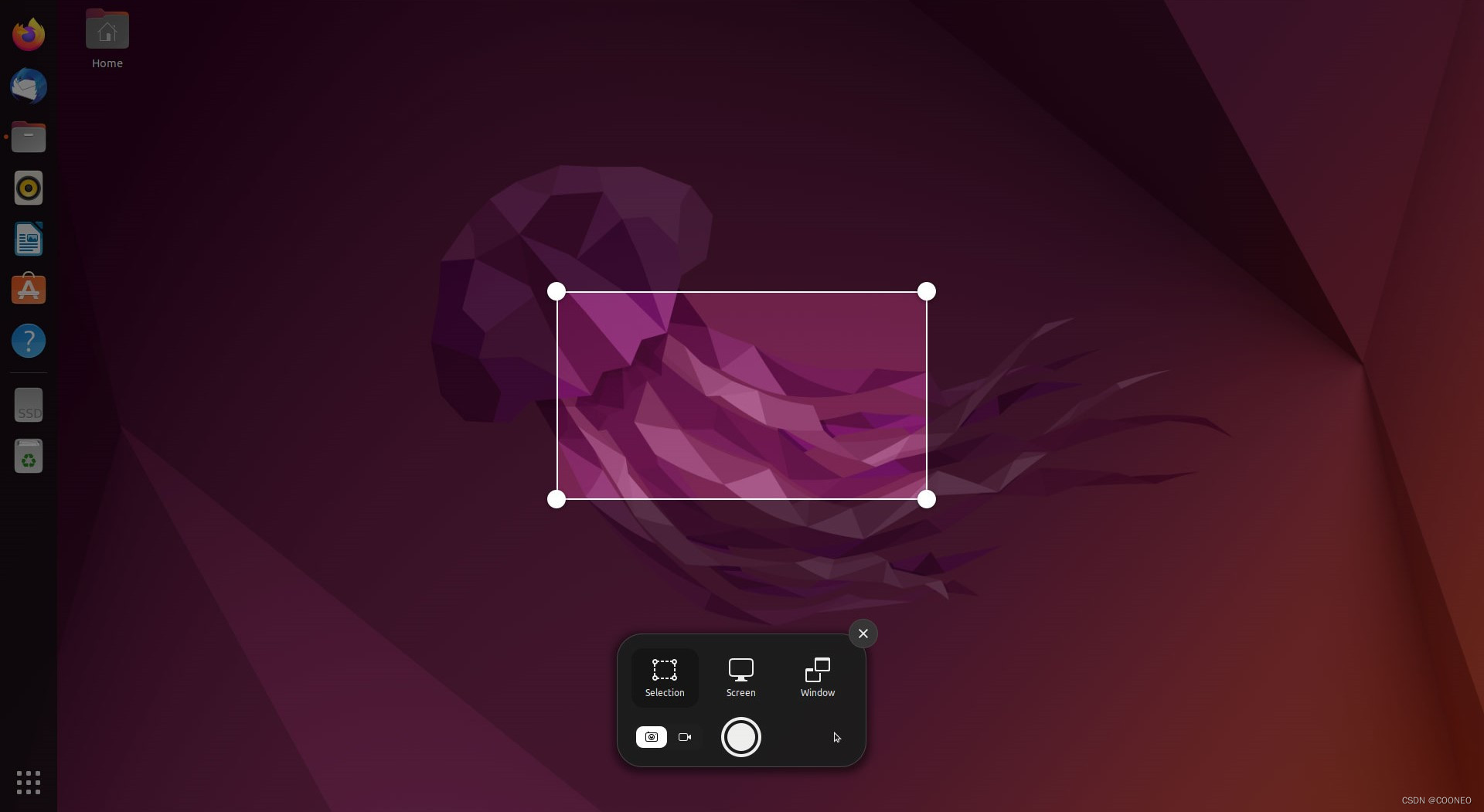
OMG! Ubuntu!
安装ROS2:
接下来就是安装最新版ROS2了,又是一顿操作,基本顺畅,很快搞定!
运行RViz2:
ROS2与ROS有些许不同,经过一番设置、编译之后,启动RViz2。
喔噢!NEOR mini登陆ROS2最新版!
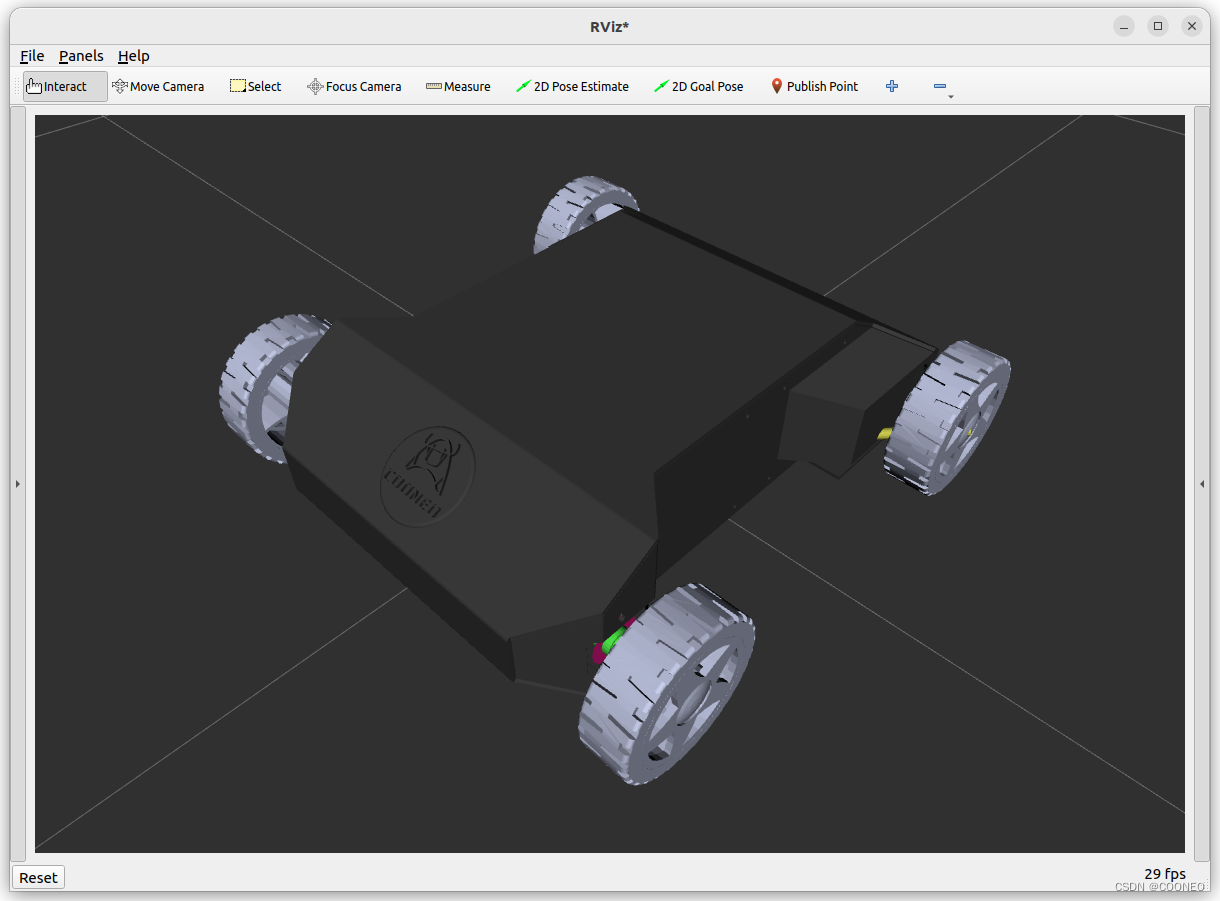
呃……虽然能够显示,但卡顿还是很明显的。

速评
总的来说,为这一支持点赞,多一个选项总是好的,也让不太适应无GUI模式开发的小伙伴更方便使用。常规使用还是很不错。至于用来开发机器人,除了GUI以外,可能跟之前的方式区别并不大,运行RViz2卡顿已经比较明显,也就没有必要接着去测试Gazebo了。
因此,如果是想要运行仿真以及有大量传感数据需要处理,特别是需要GPU算力加速的话还是Jetson较为适合,从Jetson Nano 2G、4G到Jetson Xavier NX、到最近发布的Jetson Orin,有不同规格而共享几乎相同的开发环境和SDK,从入门学习到升级部署平稳过渡。目前来说,树莓派与Jetson Nano入门级价格已经接近。
希望树莓派的价格能够早日回归正常,其初衷本就是做一款让更多人用得起的微型电脑。
感兴趣的小伙伴也可以安装试试,也欢迎大家入群交流心得和看法。

欢迎加入我们的交流群,该群面向热爱机器人研发的朋友们,方便大家一起学习、分享、交流智能机器人创造,结识更多志同道合的小伙伴。更有不定期的社区专属福利哦!关注公众号(COONEO)即可获取入群方式。
创作不易,如果喜欢这篇内容,请您也转发给您的朋友,一起分享和交流创造的乐趣,也激励我们为大家创作更多的机器人研发攻略,让我们一起learning by doing!