目录
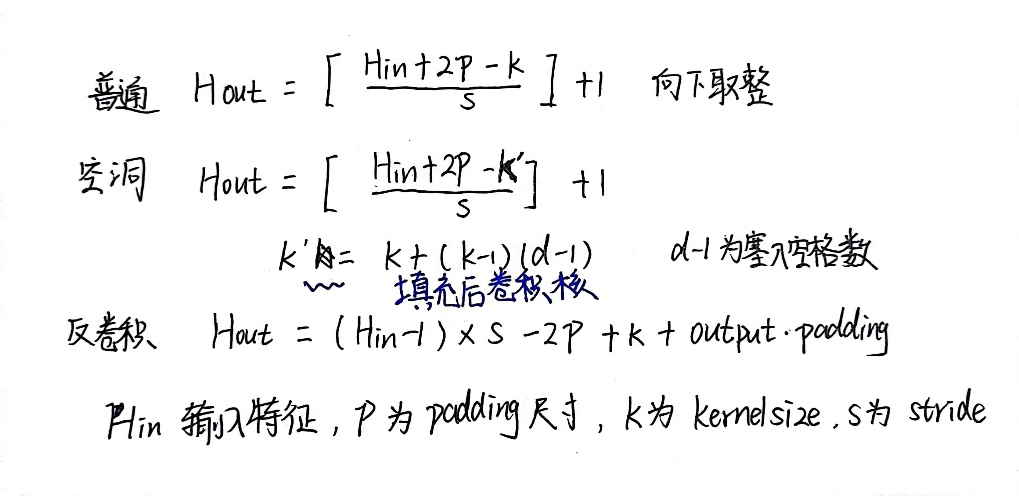
1. Feature Map尺寸计算
注意在pytorch中stride、padding、dilation、kernelsize可以为int型或者tuple型;
dilation默认为1,也是可为tuple,通常使用dilation操作来代替pooling;反卷积,卷积操作的逆运算,目标检测上一般用于为了解决融合高低层信息,但尺度不一致的问题。
2. 感受野计算
感受野:卷积神经网络每一层输出的特征图(feature map)上的像素点在原始图像上映射的区域大小。
自顶向下的计算方法(Top-down)
普通卷积的感受野计算
对于普通卷积,假设感受野初始大小为1,对于每一层来说,该层的感受野与上一层有一种线性关系!其与每个layer的stride和kernelsize有关,与padding没有关系,感受野只是表示两者的映射关系,与原始图的大小无关。


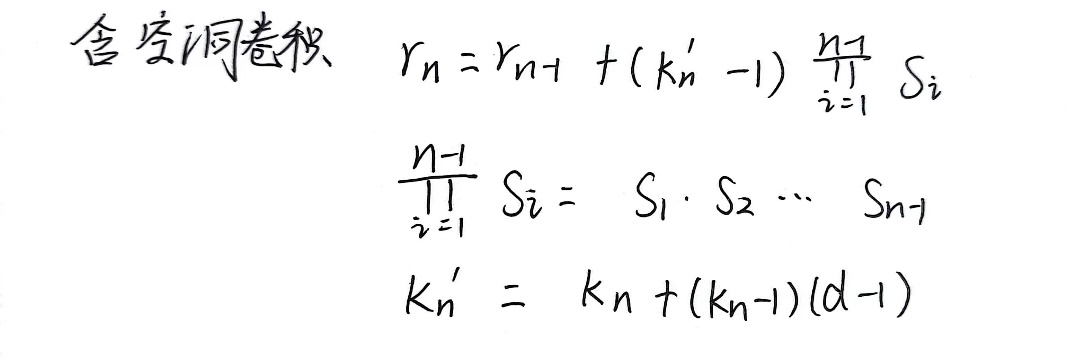
含空洞卷积的感受野计算
3. 感受野大小对提取特征的影响
1.感受野大于要提取的特征区域(比如物体)
会忽略被检测的物体,导致物体成为背景,提取不到物体特征。也就是说对小物体的检测会差一点。
2.感受野小于要提取的特征区域(比如物体)
获得的局部信息过多,导致全局信息的丢失,影响识别率。
3. 网络深度越深,卷积的过程中会丢失信息,所以一般选取大的感受野来保证不丢失过多信息。 当然,对于一些小物体检测长几个可能效果不一定好。
不同大小的卷积核获得不同大小的信息,选取合适的感受野大小比较重要,或者考虑多尺度的感受野,可能会减少1和2这种弊端
空洞卷积主要有三个作用
扩大感受野。但需要明确一点,池化也可以扩大感受野,但空间分辨率降低了,相比之下,空洞卷积可以在扩大感受野的同时不丢失分辨率,且保持像素的相对空间位置不变。简单而言,空洞卷积可以同时控制感受野和分辨率。
获取多尺度上下文信息。当多个带有不同dilation rate的空洞卷积核叠加时,不同的感受野会带来多尺度信息,这对于分割任务是非常重要的。
可以降低计算量,不需要引入额外的参数。
4. Map计算
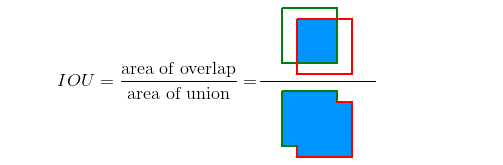
4.1 IOU计算
交并比是衡量目标检测框和真实框的重合程度,用来判断检测框是否为正样本的一个标准。通过与阈值比较来判断是正样本还是负样本。一般来讲,当预测框和真实框IOU>=0.5时,被认为是正样本。两个框的IOU就是用两个框的交集除以两个框的并集
本身是正样本还是负样本是通过IOU值与阈值比对来判定
4.2 TP TN FP FN
GroundTruth 预测结果
TP(True Positives): 真的正样本 = 【正样本 被正确分为 正样本】
TN(True Negatives): 真的负样本 = 【负样本 被正确分为 负样本】
FP(False Positives): 假的正样本 = 【负样本 被错误分为 正样本】
FN(False Negatives):假的负样本 = 【正样本 被错误分为 负样本】
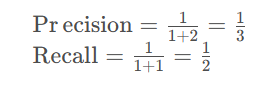
4.3 Precision和Recall
预测正确的部分占预测结果的比例

预测正确的部分占GroundTruth 的比例

举例:
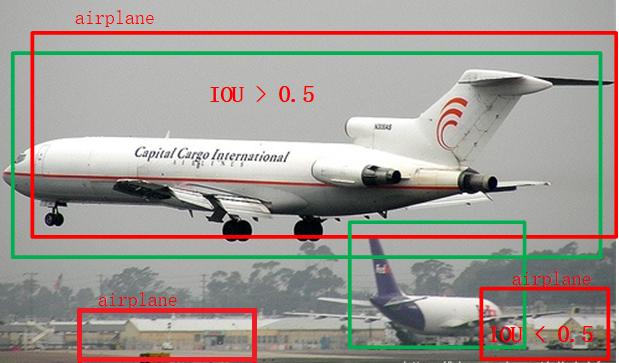
图中绿色的框是真实目标框,红色的框是分类器的预测框