概率路图(Probabilistic Road Map, PRM)法严格意义上只是一种构建规划问题图(graph)的方法,在目的上与前面介绍的可视图、Voronoi图一样。在构建完规划问题图(graph)后,还得需要图搜索算法搜索规划问题图的最短路径解。但是,从方法层面,概率路图法采用随机采样的方式来构建规划问题图,也可归为基于采样的规划算法一类。鉴于PRM方法兼具图搜索与采样方法的特性,我将之作为采样方法的第一篇,有承上启下之意。
一、背景
环境感知结果一般由连续空间中的(凸)多边形表示(当然也存在直接利用点云数据构建栅格地图的,不过应用场景大多为野外驾驶场景),下面两张图分别为基于可视图与Voronoi图法得到的规划问题图(graph)。
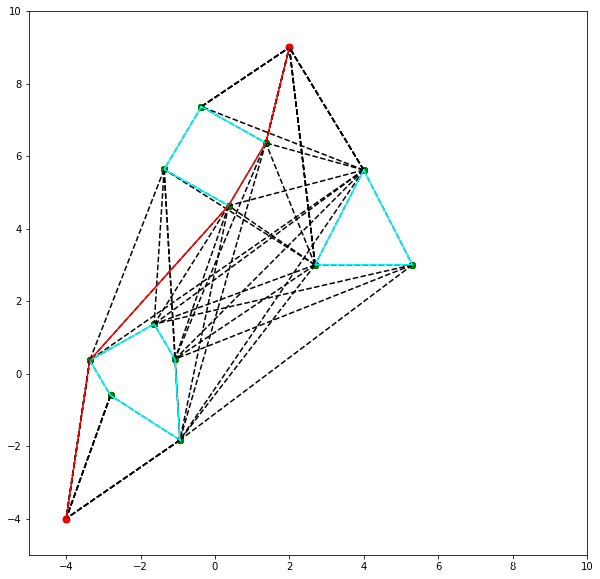
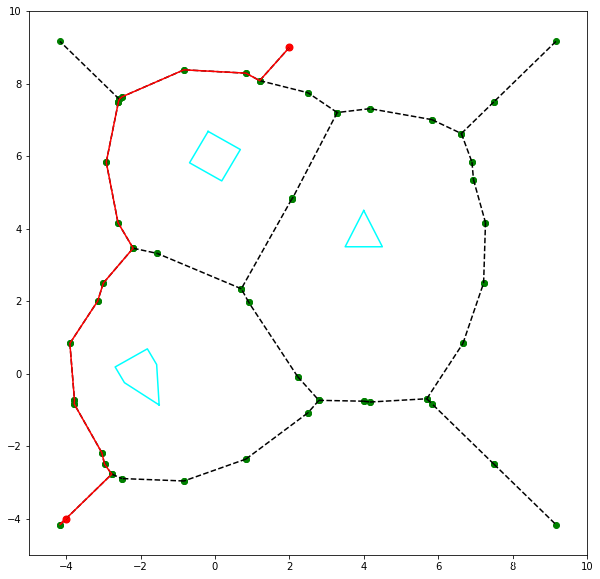
可视图法以各代表障碍物形状与大小的多边形的顶点为节点;Voronoi图法以代表障碍物的多边形顶点构建维诺图,并以该维诺图的多边形顶点作为节点。它们步骤中都包含了检查特定两节点之间的连线是否穿过障碍物,保证规划的路径是无碰撞的。可视图法与Voronoi图法的共同步骤都包含:找到节点,并检测特定两节点之间是否直线可达,若可达则在这两个节点间添加一条边。
可视图法还好,直接以障碍物多边形的顶点作为节点。Voron