目录
一、理论基础
一、介绍
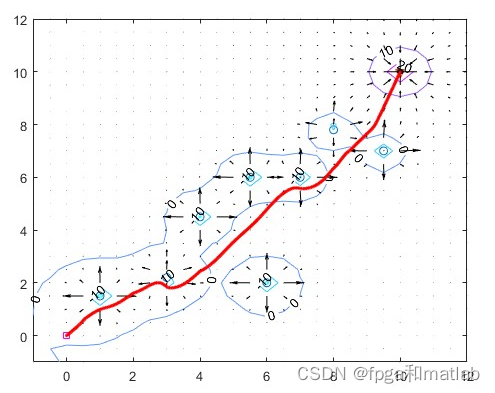
基于势场法的无人机路径规划算法是一种常用的无人机路径规划算法,其基本思想是将无人机周围的环境看作一个势场,通过计算势场的梯度来规划无人机的路径。该算法具有计算简单、路径平滑等优点,在无人机路径规划中得到广泛应用。本文将详细介绍基于势场法的无人机路径规划算法的原理、数学公式和实现过程。
二、原理
基于势场法的无人机路径规划算法的基本原理是利用势场的梯度来规划无人机的路径。势场可以理解为无人机周围的环境对其产生的影响,例如障碍物、目标点等。在势场法中,无人机的目标点被视为吸引子,而障碍物则被视为斥力子,无人机的路径规划过程就是在吸引子和斥力子之间寻找平衡点的过程。
在势场法中,无人机的位置被表示为(x,y),势场可以表示为U(x,y),则势场的梯度可以表示为:
?U(x,y) = (?U/?x, ?U/?y)

在无人机路径规划中,目标点通常被视为吸引子,其势场可以表示为:
U_goal(x,y) = k * ((x-x_goal)^2 + (y-y_goal)^2)
其中,k为常数,(x_goal,y_goal)为目标点的坐标。
障碍物通常被视为斥力子,其势场可以表示为:
U_obs(x,y) = ∑(k_obs/d_obs - 1/d_obs^2) * f(d_obs)
其中,k_obs为常数,d_obs为无人机到障碍物的距离,f(d_obs)为障碍物的修正函数,通常为:
f(d_obs) = {1, d_obs > d0
{(d_obs-d0)^2/((d_obs-d0)^2-1), d_obs <= d0
其中,d0为障碍物的作用范围。
无人机在势场中的位移可以表示为:
Δx = -α * ?U(x,y)
其中,α为步长参数。
在无人机路径规划中,需要不断计算无人机周围的势场,并根据势场的梯度来更新无人机的位置,直到无人机到达目标点为止。
三、数学公式
势场的梯度
?U(x,y) = (?U/?x, ?U/?y)
目标点的势场
U_goal(x,y) = k * ((x-x_goal)^2 + (y-y_goal)^2)
障碍物的势场
U_obs(x,y) = ∑(k_obs/d_obs - 1/d_obs^2) * f(d_obs)
障碍物的修正函数
f(d_obs) = {1, d_obs > d0
{(d_obs-d0)^2/((d_obs-d0)^2-1), d_obs <= d0
无人机的位移
Δx = -α * ?U(x,y)
四、实现过程
基于势场法的无人机路径规划算法的实现过程包括以下几个步骤:
初始化无人机的位置和目标点的位置。
获取周围的环境信息,包括障碍物的位置和作用范围等。
根据目标点和障碍物的位置计算势场,并求出势场的梯度。
根据势场的梯度计算无人机的位移,更新无人机的位置。
判断无人机是否到达目标点,如果到达,则结束路径规划。
如果无人机遇到障碍物,则根据障碍物的位置和作用范围来调整势场,使其产生斥力,以避免无人机与障碍物发生碰撞。
重复以上步骤,直到无人机到达目标点。
下面是基于势场法的无人机路径规划算法的伪代码:
1. 初始化无人机的位置和目标点的位置
2. while (无人机未到达目标点) do
3. 获取周围的环境信息,包括障碍物的位置和作用范围等
4. 根据目标点和障碍物的位置计算势场,并求出势场的梯度
5. 根据势场的梯度计算无人机的位移,更新无人机的位置
6. 判断无人机是否到达目标点,如果到达,则结束路径规划
7. 如果无人机遇到障碍物,则根据障碍物的位置和作用范围来调整势场,使其产生斥力,以避免无人机与障碍物发生碰撞
end while
需要注意的是,在实际应用中,为了提高路径规划的效率和精度,还需要对算法进行优化和改进,例如采用多层势场、动态调整步长等方法。
总之,基于势场法的无人机路径规划算法是一种简单而有效的无人机路径规划算法,其基本思想是利用势场的梯度来规划无人机的路径。在实际应用中,可以根据具体情况进行优化和改进,以达到更好的路径规划效果。
二、核心程序
............................................................................
%,
%
Xo=[0 0];%
k=20;%
K=0;%
m=5;%
Po=2;%?0?
n=8;%
a=0.5;
l=0.05;%
J=500;%
%?Po?
%end
%
Xsum=[10 10;1 1.5;3 2.2;4 4.5;7 6;6 2;5.5 6;8 7.8;9.5 7];%(n+1)*2?[10 10]
Xj=Xo;%j=1??Xj
[x,y]=meshgrid(-1:0.5:12,-1:0.5:12);
z=0.5*k./(sqrt((x-10).^2+(y-10).^2+0.09))-0.5*m*(1./(sqrt((x-1).^2+(y-1.5).^2+0.09))-1/3.5).^2-0.5*m*(1./(sqrt((x-3).^2+(y-2.2).^2+0.09))-1/3.5).^2 ...
-0.5*m*(1./(sqrt((x-4).^2+(y-4.5).^2+0.09))-1/3).^2-0.5*m*(1./(sqrt((x-7).^2+(y-6).^2+0.09))-1/3).^2-0.5*m*(1./(sqrt((x-6).^2+(y-2).^2+0.09))-1/3.5).^2 ...
-0.5*m*(1./(sqrt((x-5.5).^2+(y-6).^2+0.09))-1/4).^2-0.5*m*(1./(sqrt((x-8).^2+(y-7.8).^2+0.09))-1/3).^2-0.5*m*(1./(sqrt((x-9.5).^2+(y-7).^2+0.09))-1/3).^2;
% contour(x,y,z,[-50:20:1000]);
[C,h]=contour(x,y,z,[-80:10:300]);
set(h,'ShowText','on','TextStep',get(h,'LevelStep')*2)
colormap cool
[px,py]=gradient(z);%?x,y?
quiver(x,y,px,py,'k') %
p=sqrt(px.^2+py.^2);
%%
t=1;
M(t)=getframe;
t=t+1;
%*********************************
for j=1:J%
Goal(j,1)=Xj(1);%Goal?
Goal(j,2)=Xj(2);
%
Theta=compute_angle(Xj,Xsum,n);%Theta??X?
%
Angle=Theta(1);%Theta?1?
angle_at=Theta(1);%?angle_at
[Fatx,Faty]=compute_Attract(Xj,Xsum,k,Angle,0,Po,n);%?x,y?
for i=1:n
angle_re(i)=Theta(i+1);%?n??n?
end
%
[Frerxx,Freryy,Fataxx,Fatayy]=compute_repulsion(Xj,Xsum,m,angle_at,angle_re,n,Po,a);%?x,y?
%?j?
Fsumyj=Faty+Freryy+Fatayy;%y?
Fsumxj=Fatx+Frerxx+Fataxx;%x?
Position_angle(j)=atan(Fsumyj/Fsumxj);%?x?
%
Xnext(1)=Xj(1)+l*cos(Position_angle(j));
Xnext(2)=Xj(2)+l*sin(Position_angle(j));
%
Xj=Xnext;
X=Goal(:,1);
Y=Goal(:,2);
plot(X,Y,'.r');
M(t)=getframe;t=t+1;
%
if ((Xj(1)-Xsum(1,1))>0)&((Xj(2)-Xsum(1,2))>0)%
K=j;%
break;
%?j?
end%?if?
end%
up2130三、仿真结论