来源于Tesla AI Day
Tesla无人驾驶算法的核心任务就是如何理解我们所看到的一切呢?也就是说,不使用高端的设备,比如激光雷达,仅仅使用摄像头就能够将任务做得很好。Tesla使用环绕型的8个摄像头获得输入。
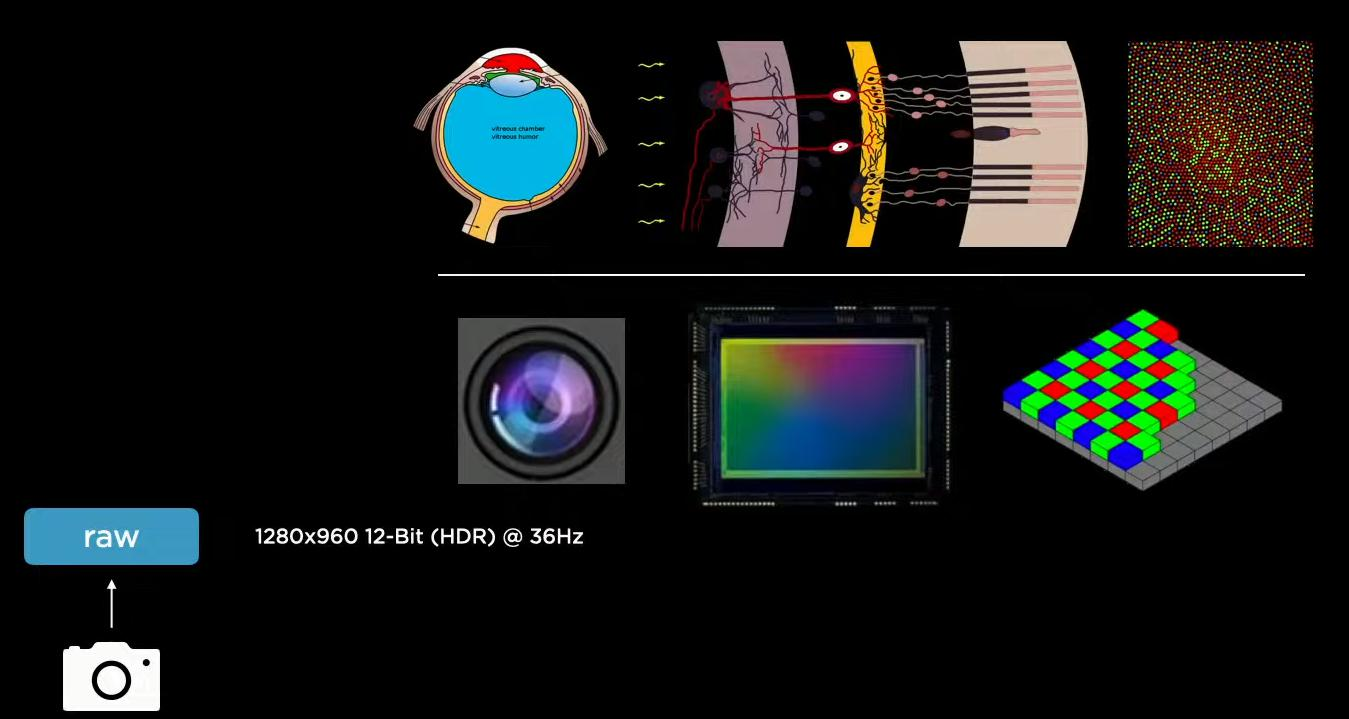
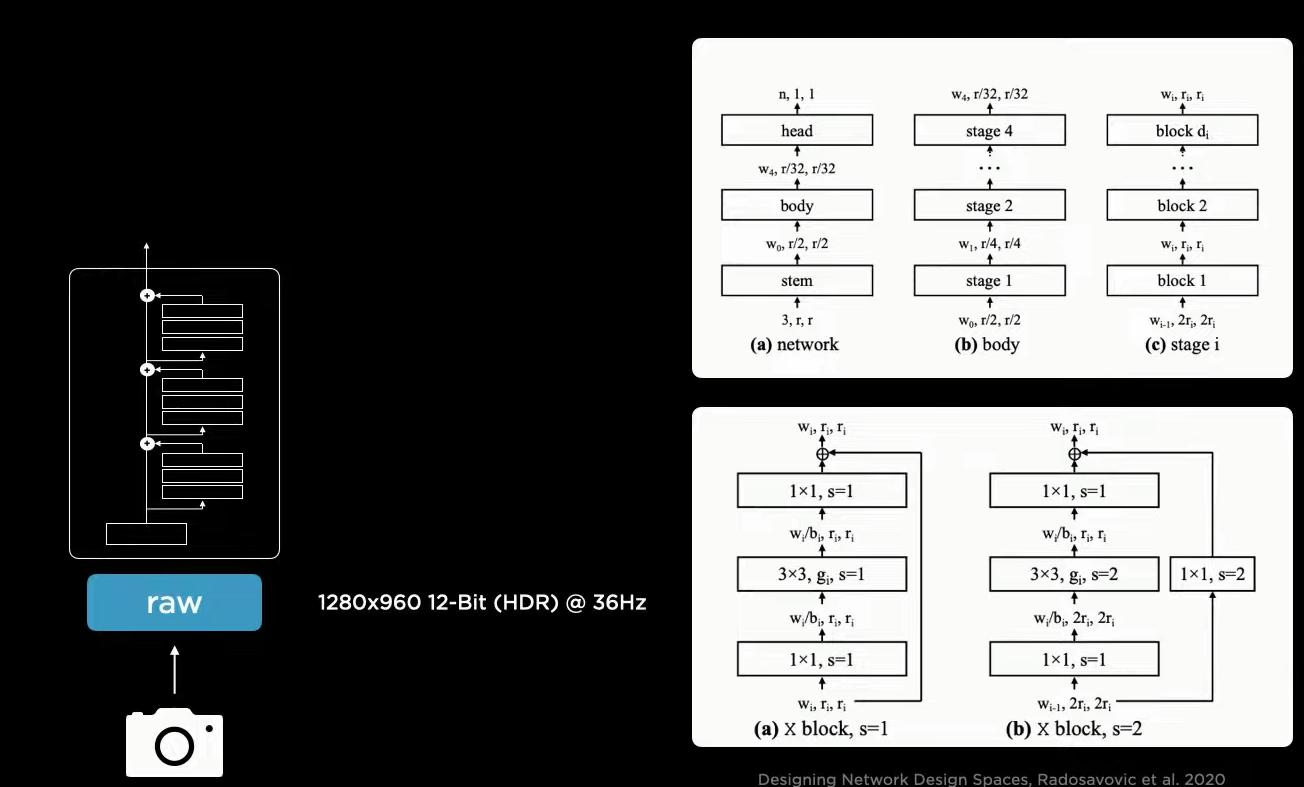
第一步是特征提取模块Backbone,无论什么任务都离不开特征提取,8个摄像头获取的图片数据均经过Backbone进行特征提取
 在自动驾驶过程中有一个问题,离得近的物体比较大,离得远的物体比较小,为了解决这个问题,可以采用FPN的思想,获得多尺度的特征。在这里,他使用的是EfficientDet的BiFPN。
在自动驾驶过程中有一个问题,离得近的物体比较大,离得远的物体比较小,为了解决这个问题,可以采用FPN的思想,获得多尺度的特征。在这里,他使用的是EfficientDet的BiFPN。
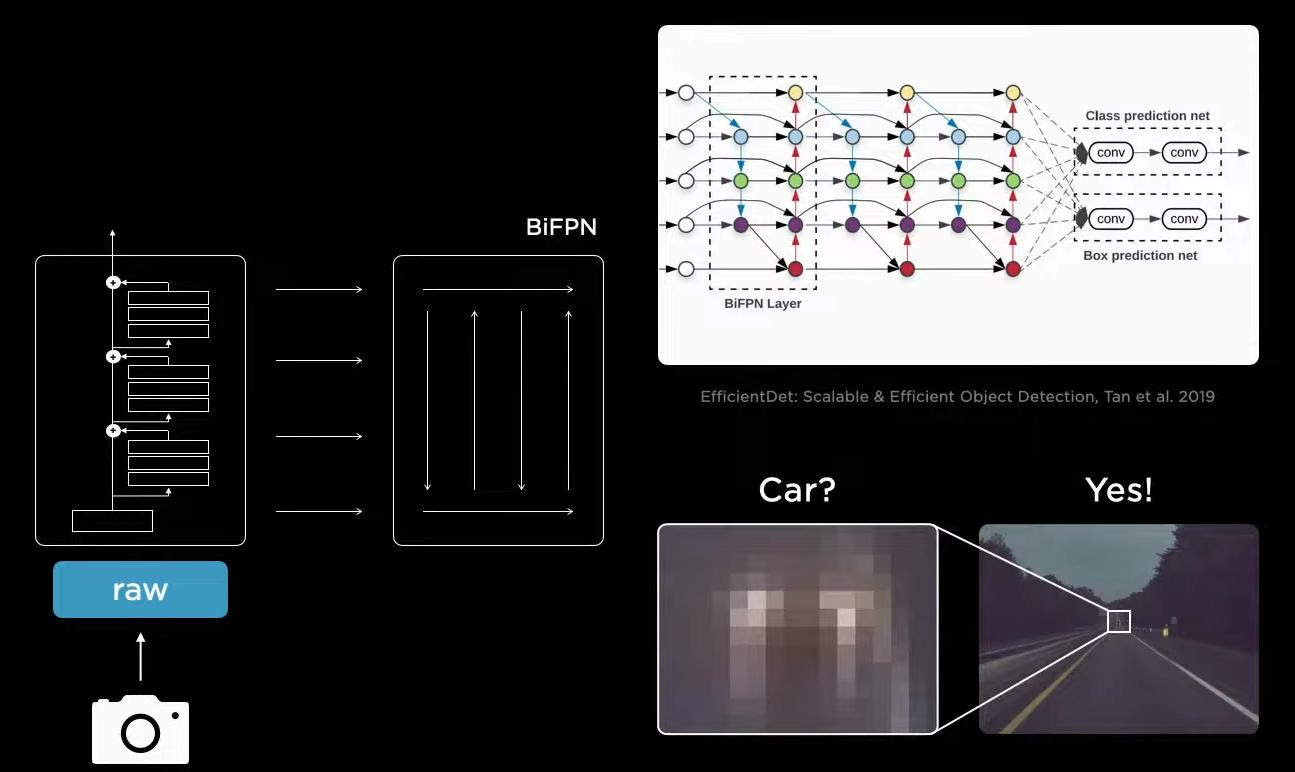
在整体架构上,首先经过Backbone(这里使用的RegNet)和BiFPN获得多尺度的特征。然后连接不同的下游任务,比如目标检测、车道线检测等。所有的下游任务均共享一套特征。这有三个好处,第一,共享特征可以保证特征提取得更加的高效。第二,共享特征能够对下游任务进行拓展,相当于下游任务之间各自为