“别人怎么对你,你就用相同的态度回应!生而为人,谁都是第一次。”
生活依然继续~

先来看一下想要实现无人驾驶所需的核心模块吧:

感知+融合+决策规划+控制(还有其中不能少的实时定位)
白话解释:想要实现无人操控的驾驶,则需要完成人在开车时所要完成的任务,包括:用人的眼睛和耳朵来感知车辆周围的道路环境信息,用人的大脑来决策是否可以行驶,用人的手、脚来操作方向盘。那么,无人驾驶即需要用一些传感器先来感知车辆周围的环境信息,然后交给工控机(域控制器)来做一些融合处理,在感知信息处理完成并确定「我在哪」之后(即定位的问题),智能车接下来需要做决策规划了,决策是停还是走,如果可以走的话,是怎么走?直行还是绕道行驶?即路径规划(path-planning)的问题,最后在行驶的过程中对车辆进行实时控制,包括加减速、导航等,通过这样不断的重复过程实现车辆的自动驾驶。
接下来,分别简单的介绍下这几个模块:
█感知
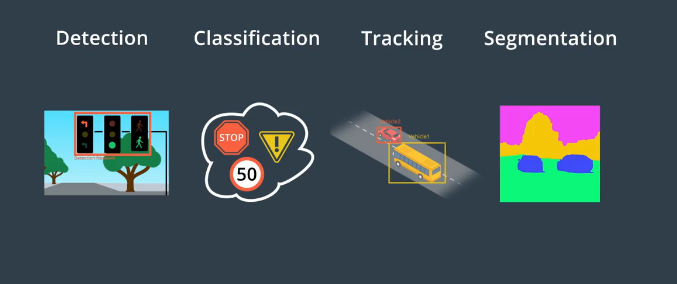
无人驾驶有四个感知世界的核心任务,检测,分类,跟踪,语义分割。
检测是指找出物体在环境中的位置
分类是指明确对象是什么
跟踪是指随时间推移观察移动物体
语义分割意味着将图像中的每个像素与语义类别进行匹配
感知则需要的传感器有:单目摄像机、Lidar、Radar
单目摄像机

单目摄像机模组只包含一个摄像机和一个镜头。由于很多图像算法的研究都是基于单目摄像机开发的,因此相对于其他类别的摄像机,单目摄像机的算法成熟度更高。但是单目有着两个先天的缺陷。一是它的视野完全取决于镜头。焦距短的镜头,视野广,但缺失远处的信息。反之亦然。因此单目摄像机一般选用适中焦距的镜头。二是单目测距的精度较低。摄像机的成像图是透视图,即越远的物体成像越小。近处的物体,需要用几百甚至上千个像素点描述;而处于远处的同一物体,可能只需要几个像素点即可描述出来。这种特性会导致,越远的地方,一个像素点代表的距离越大,因此对单目来说物体越远,测距的精度越低。
激光雷达
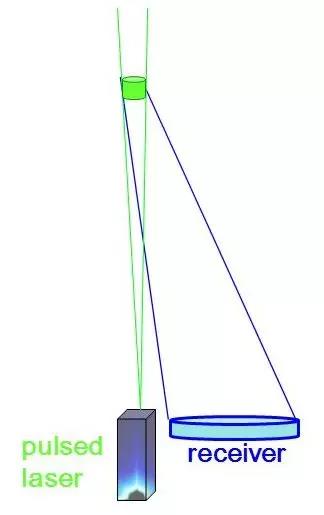
激光雷达的发射器发射出一束激光,激光光束遇到物体后,经过漫反射,返回至激光接收器,雷达模块根据发送和接收信号的时间间隔乘以光速,再除以2,即可计算出发射器与物体的距离。
360°的激光数据可视化后,就是大家经常在各种宣传图上看到的效果,如下图。

图中的每一个圆圈都是一个激光束产生的数据,激光雷达的线束越多,对物体的检测效果越好。比如64线的激光雷达产生的数据,将会更容易检测到路边的马路牙子。
16/32/64线的激光雷达只能提供原始的点云信号,没有对应的SDK直接输出障碍物结果。因此各大自动驾驶公司都在点云数据基础上,自行研究算法完成无人车的感知工作。
激光雷达点云数据的一般处理方式是:数据预处理(坐标转换,去噪声等),聚类(根据点云距离或反射强度),提取聚类后的特征,根据特征进行分类等后处理工作。
那你知道Lidar能干哪些工作吗:
障碍物检测与分割:利用高精度地图限定感兴趣区域(ROI,Region of Interest)后,基于全卷积深度神经网络学习点云特征并预测障碍物的相关属性,得到前景障碍物检测与分割。
可通行空间检测:利用高精度地图限定ROI后,可以对ROI内部(比如可行驶道路和交叉口)的点云的高度及连续性信息进行判断点云处是否可通行。
高精度电子地图制图与定位:利用多线激光雷达的点云信息与地图采集车载组合惯导的信息,进行高精地图制作。自动驾驶汽车利用激光点云信息与高精度地图匹配,以此实现高精度定位。
障碍物轨迹预测:根据激光雷达的感知数据与障碍物所在车道的拓扑关系(道路连接关系)进行障碍物的轨迹预测,以此作为无人车规划(避障、换道、超车等)的判断依据。
毫米波雷达

大陆的ARS 408-21
对于77GHZ与79GHZ的雷达:由光速 = 波长 * 频率,频率更高的毫米波雷达,其波长越短。波长越短,意味着分辨率越高;而分辨率越高,意味着在距离、速度、角度上的测量精度更高。因此79GHz的毫米波雷达必然是未来的发展趋势。毫米波雷达相比于激光有更强的穿透性,能够轻松地穿透保险杠上的塑料,因此常被安装在汽车的保险杠内。这也是为什么很多具备ACC(自适应巡航)的车上明明有毫米波雷达,却很难从外观上发现它们的原因。
毫米波雷达的数据:由于毫米波的测距和测速原理都是基于多普勒效应,因此与激光的笛卡尔(XYZ)坐标系不同,毫米波雷达的原始数据是基于(距离+角度)极坐标系。当然,两种坐标系可以根据三角函数相互转换。
毫米博雷达数据的缺点:数据稳定性差;对金属敏感;高度信息缺失
█定位
定位需要的传感器有:高精地图;差分GPS+IMU惯导;
高精度电子地图也称为高分辨率地图(HD Map,High Definition Map),是一种专门为无人驾驶服务的地图。与传统导航地图不同的是,高精度地图除了能提供的道路(Road)级别的导航信息外,还能够提供车道(Lane)级别的导航信息。无论是在信息的丰富度还是信息的精度方面,都是远远高于传统导航地图的。
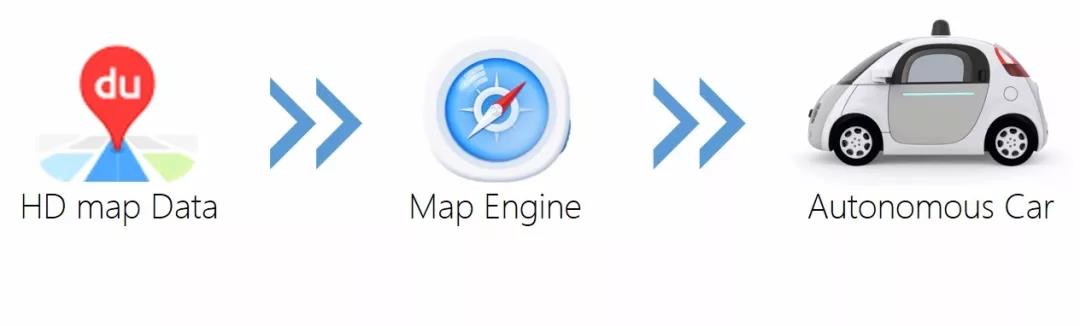
高精度地图只是一个静态的数据,在实际使用时,不可能一开始就将全国的地图导入到系统中,这样不仅费时,而且会占用系统很多资源。高精度地图的供应商(图商)除了提供高精度地图外,还会提供一个叫做“地图引擎”的软件。由这个软件负责整个高精度地图的资源调度,无人车只需要告诉“地图引擎”现在的大致位置以及想要去的地方,“地图引擎”就会将这个过程中所要用到的高精度地图数据发布出来,供无人车使用。数据流如下图所示。
高精度地图的应用需要配合高精度的定位。
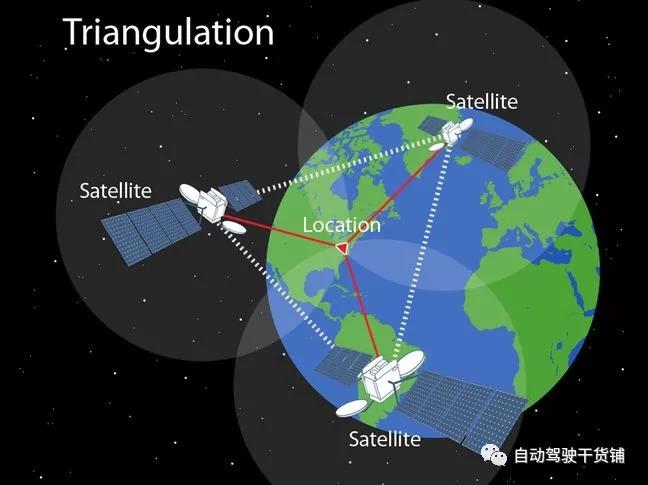
GPS是全球定位系统(Global Position System)的简称,常见于汽车、手机中。民用GPS的定位精度在10~20米之间,这是为什么用手机的GPS定位,有时候明明在陆地上,却被认为在河里的原因。GPS定位的原理很简单,叫做三角定位法(Triangulation)。原理如图:
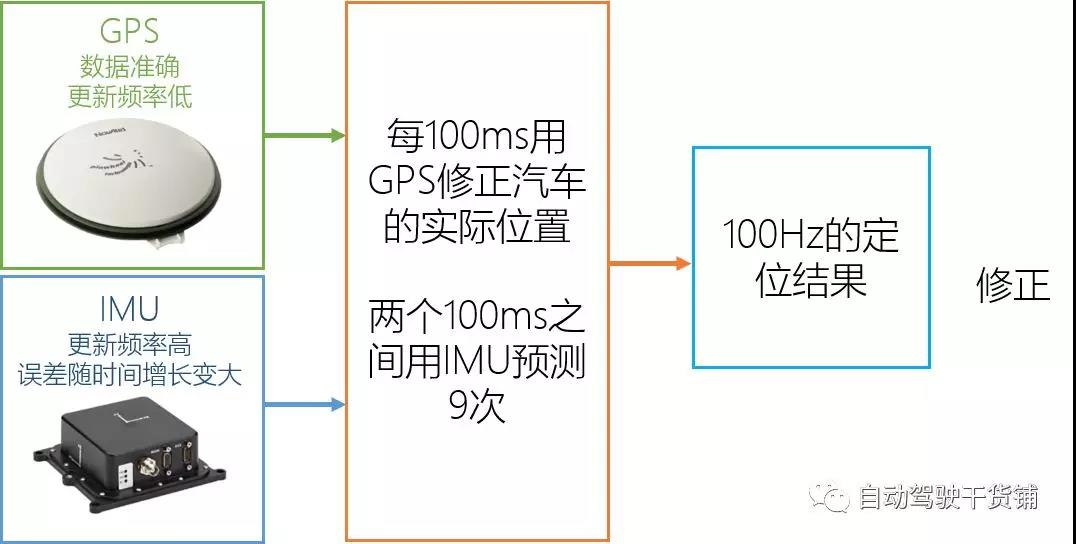
GPS定位精度不太够,因为在空旷且云层稀薄的情况下,无线电信号的传播时间乘以光速确实与实际的距离接近。但无线电信号的传播时间多少会受到传播介质的影响的。诸如云层的稀薄情况、天气好坏等都会影响到传播时间,进而影响到距离的计算。距离不准,得到的定位结果当然也不准了。为了降低天气、云层对定位的影响,引入了差分GPS的技术,即在地面上建基站(Base Station),基站在建立时,可以得到基站的精确位置信息(经纬度)。同时基站具有接收卫星信号的功能。当基站的GPS接收机与车载GPS接收机相距较近时(<30km),可以认为两者的GPS信号通过的是同一片大气区域,即两者的信号误差基本一致。根据基站的精确位置和信号传播的时间,反推此时天气原因导致的信号传播误差,之后利用该误差修正车载的GPS信号,即可降低云层、天气等对信号传输的影响。使用差分GPS技术,可以使无人车的定位精度从10米级别提升至米级。差分GPS可以解决定位的精度问题,但是解决不了遮挡和反射问题。比如:

所以为了能让无人驾驶系统更高频率地获取定位信息,就必须引入频率更高的传感器——IMU(Inertial Measurement Unit)惯性测量单元。
到这,关键核心内容已说完了,还有控制和决策规划,其实就很简单了,就是一些算法上的实现。
加油~
over
未来再见