1.查看ros版本
#打开终端输入
roscore
2.打开Rviz
case1:打开两个终端
#终端1输入:
roscore
#终端2输入:
rosrun rviz rviz
3. ROS仿真步骤
3.1 创建工作空间
桌面打开终端跳转主目录:

- 1.创建工作空间爱你
mkdir catkin_ws
 - 2.创建src文件夹并进行工作空间初始化
- 2.创建src文件夹并进行工作空间初始化
cd catkin_ws
mkdir src
cd src
catkin_init_workspace
 - 3.编译工作空间目录
- 3.编译工作空间目录
cd ../ #返回工作空间路径
catkin_make #编译工作空间
 - 4.创建功能包并添加依赖
- 4.创建功能包并添加依赖
cd .src #进入工作空间
catkin_create_pkg mbot_description urdf xacro #创建功能包、添加依赖
***
cd ~/catkin_ws/src/mbot_description
mkdir urdf
mkdir meshes
mkdir launch
mkdir config
 - 5.重新编译及环境变量设置
- 5.重新编译及环境变量设置
cd .. #返回工作空间目录
catkin_make #重新编译
 添加环境变量
添加环境变量
sudo gedit ~/.bashrc #打开配置文档
#文档末尾添加:
source ~/catkin_ws/devel/setup.bash和export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/catkin_ws/
终端输入:
source ~/.bashrc
echo $ROS_PACKAGE_PATH #可输出环境变量路径

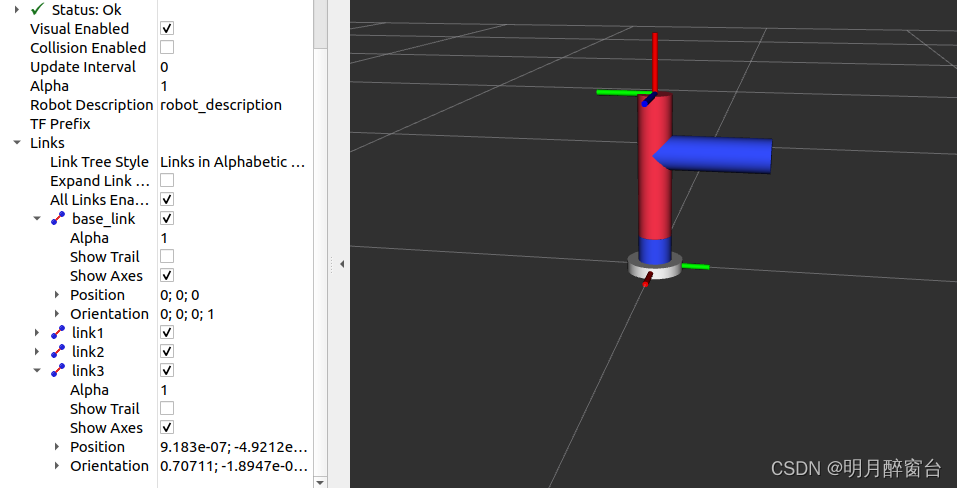
3.2 rviz仿真
- 前提已编写好模型文件
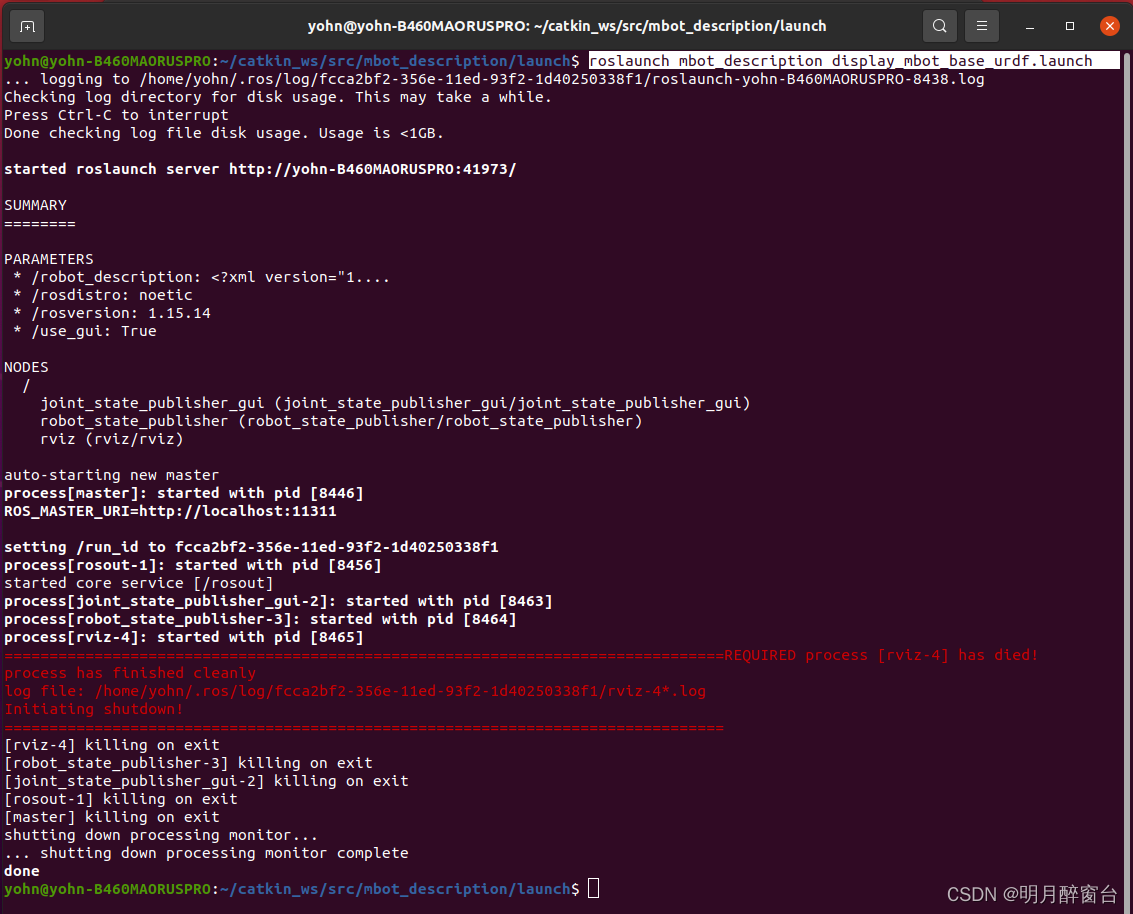
./urdf/xx.urdf和启动文件./launch/xx.launch - 在launch文件路径下打开终端,输入命令
roslaunch mbot_description display_mbot_base_urdf.launch
 启动成功后导入模型即可,具体可参考:https://blog.csdn.net/yohnyang/article/details/126600229
启动成功后导入模型即可,具体可参考:https://blog.csdn.net/yohnyang/article/details/126600229
3.3 错误处理
运行$ roslaunch mbot_description display_mbot_base_urdf.launch有误
错误显示:
RLException: [display_mrobot_with_camera.launch] is neither a launch file in
package [mrobot_description] nor is [mrobot_description] a launch file name
The traceback for the exception was written to the log file
网上查看众多方案不太好快速有效的解决,照着上述工作空间的编译仿真重新走一遍即可解决
4.URDF建模总结
- 1.joint坐标系决定转角的大小和旋转范围,其建模时的在转角均参照基坐标系,偏移量基于上一个坐标系
- 2.link决定连杆大小和方向,其建模是的转角是基于基坐标系,偏移量是基于joint坐标系
- 3.这个部分乱糟糟的,实际使用时多试几次就知道了