1207基于8086四种波形发生器仿真设计-微机原理汇编仿真资料

out dx,al
in ax,0000H
cmp al,11111111b ;默认波形,正弦波
jz sinewave
cmp al,11111110b
jz sinewave
cmp al,11111101b
jz sawtoothwave
cmp al,11111011b
jz triangularwave
cmp al,11110111b
jz squarewave
cmp al,11101111b
jz squarewave
cmp al,11011111b
jz sinewave
jmp start
sawtoothwave:;锯齿波的产生
mov dx,0200h
zn:
mov cx,0ffh
mov al,00h
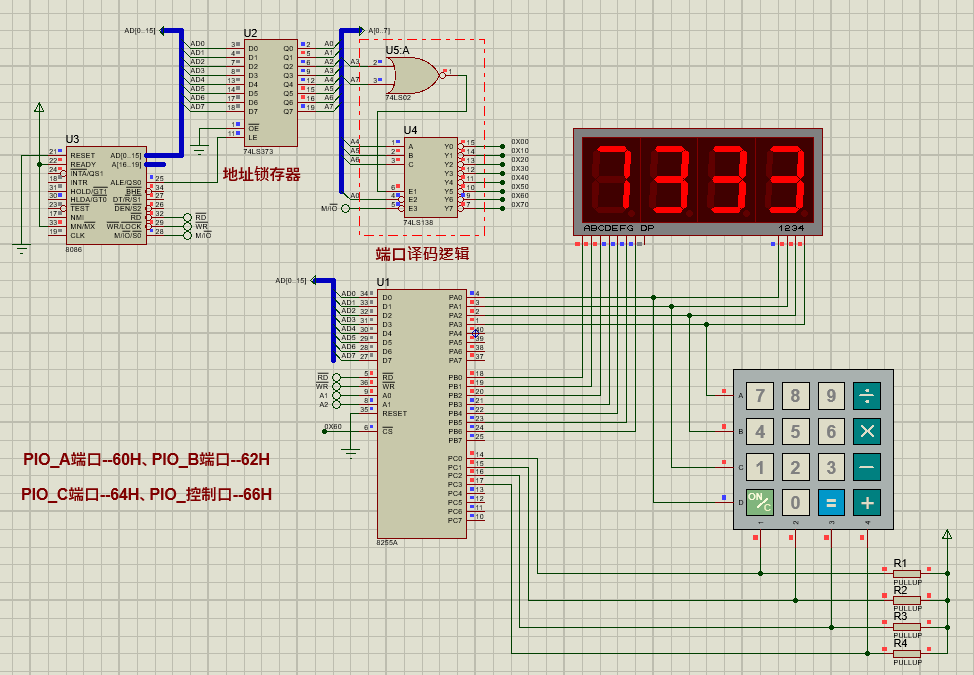
1202基于8086数码管矩阵键盘控制设计-全套资料
STACK SEGMENT STACK
DW 64 DUP (?)
STACK ENDS
DATA SEGMENT
TABLE DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ;七段码表
LDATA DB 2 DUP(00H)
RDATA DB 2 DUP(00H)
OPERATOR DB 1 00H
TEMPS DW 100 DUP(?)
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,SS:STACK,DS:DATA
START: MOV AX, DATA
MOV DS, AX
MOV SI, 3000H ;显示缓冲区初始化
MOV AL, 00H
MOV [SI], AL
MOV [SI+1], AL
MOV [SI+2], AL
MOV [SI+3], AL
MOV DI, 3003H ;显示缓冲区尾地址
MOV AL, 81H ;8255初始化
OUT 66H, AL ;注意:控制口63H改为66H 
1218基于8086智能汽车控制系统设计-微机原理课设
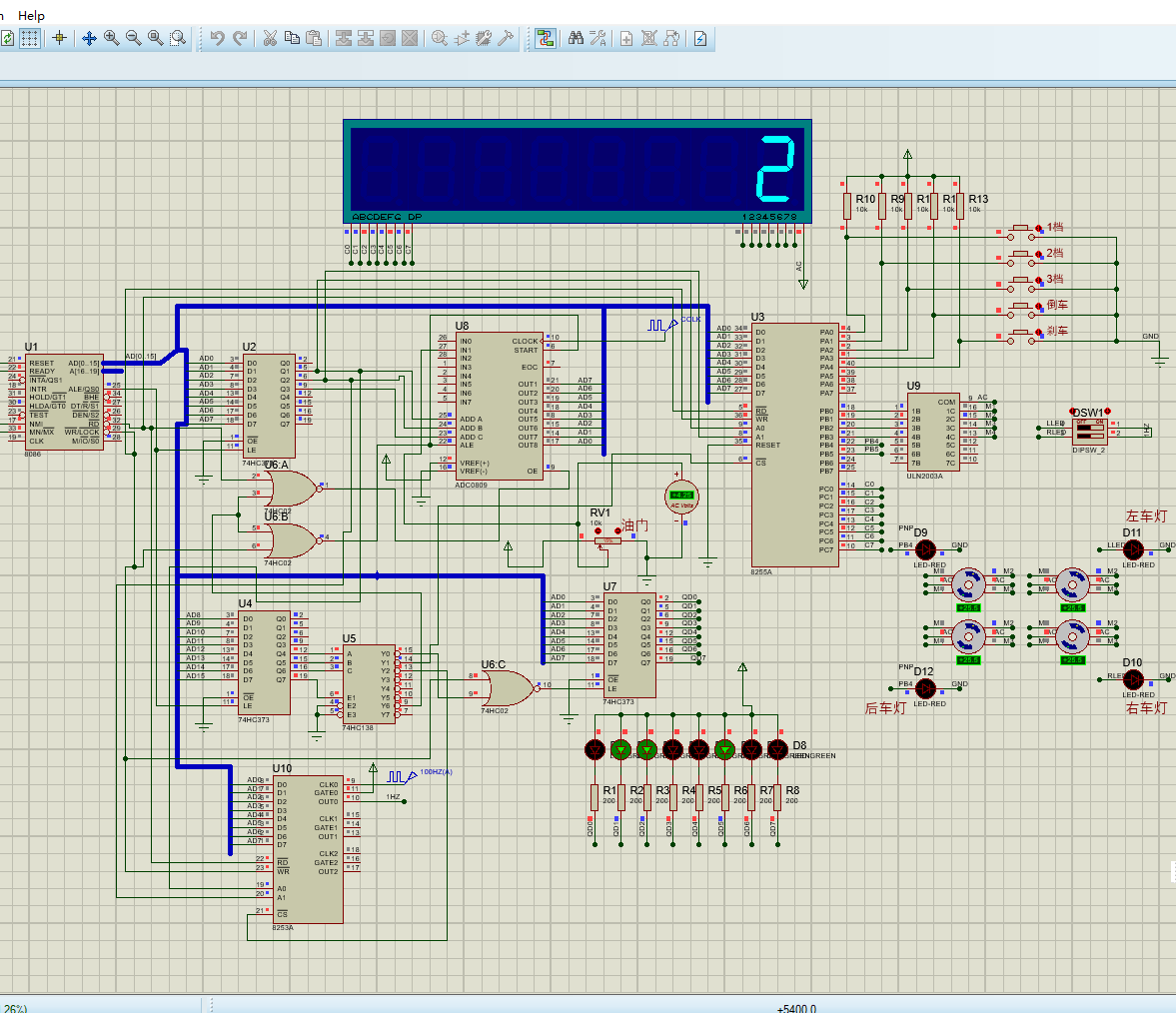
#define IOCON 9006H//16位总线,高8位用来传送地址信号,低8位用来传输数据
#define IOA 9000H
#define IOB 9002H
#define IOC 9004H
#define AD0809 0E002H
#define OUT373 8000H
#define TCONTRO 0A006H
#define TCON0 0A000H
unsigned char table1[8]={0x22,0x26,0x24,0x2c,0x28,0x29,0x21,0x23};//两个数组元素高位不同跟控制后车灯有关
unsigned char table2[8]={0x03,0x01,0x09,0x08,0x0c,0x04,0x06,0x02};
void outp(unsigned int addr, char data)
// Write a byte to the specified I/O port 向接口写入数据
{ __asm
{ mov dx, addr
mov al, data
out dx, al
}
}
char inp(unsigned int addr)
// Read a byte from the specified I/O port 从接口读出数据
{ char result;
__asm

1209基于8086微机原理直流电机控制系统-设计资料
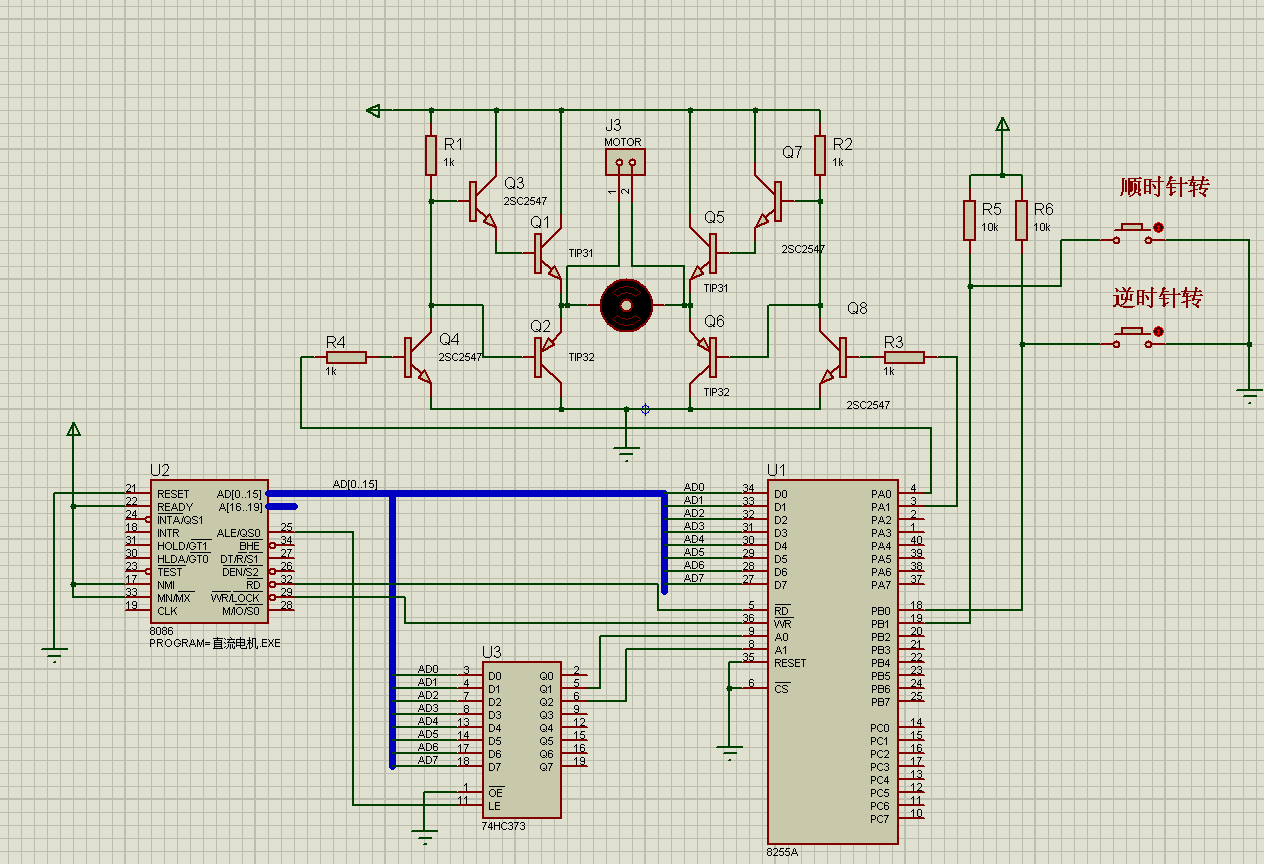
CODE SEGMENT 'CODE'
ASSUME CS:CODE,SS:STACK,DS:DATA
IOCON EQU 8006H
IOA EQU 8000H
IOB EQU 8002H
IOC EQU 8004H
START:
MOV AX, DATA
MOV DS, AX
MOV AX, STACK
MOV SS, AX
MOV AX, TOP
MOV SP, AX
TEST_BU:MOV AL,82H
MOV DX,IOCON
OUT DX,AL
NOP
NOP
NOP

1282基于单片机PWM直流电机控制系统设计汇编-设计资料
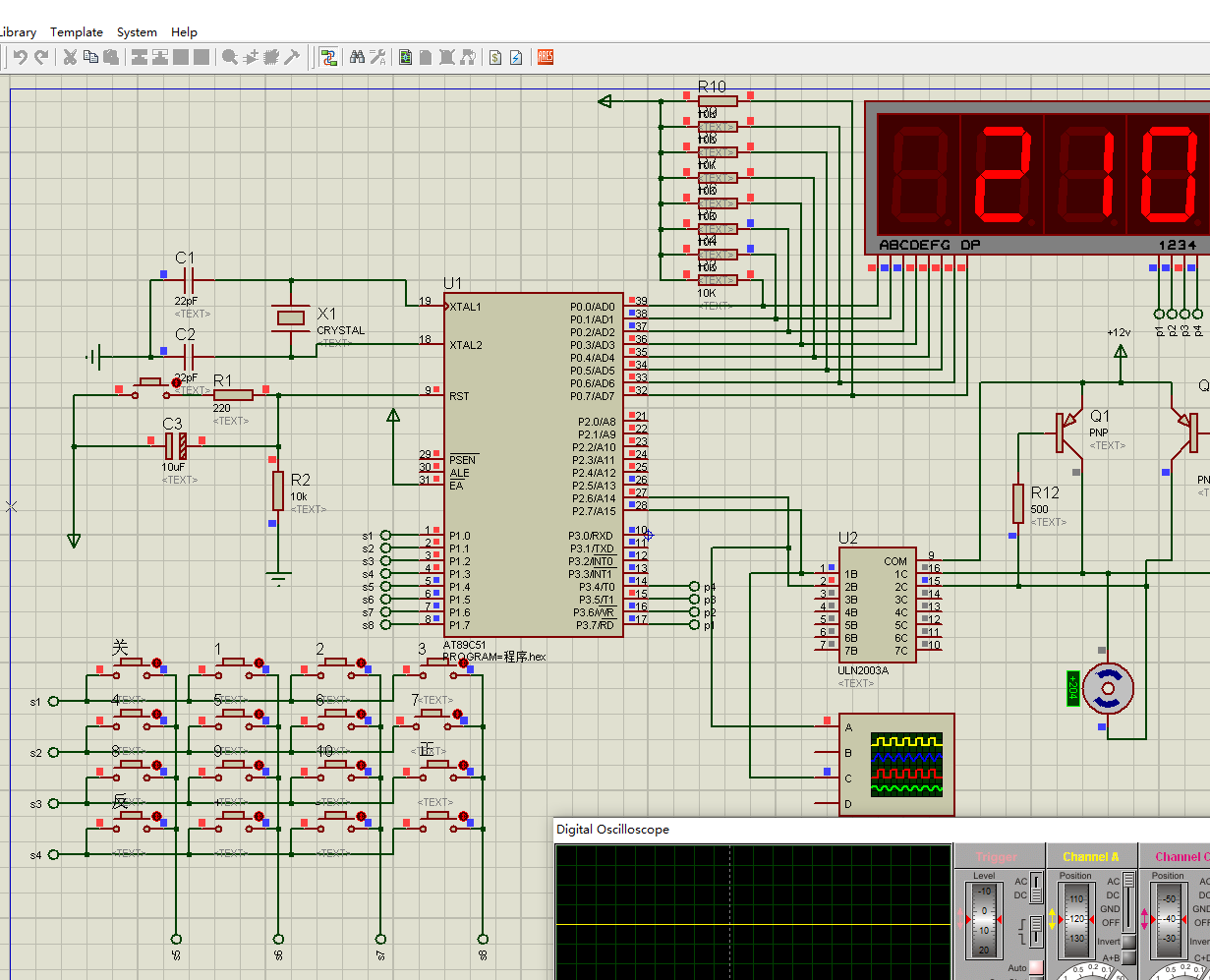
FLAG BIT 00H ;正反转标志位
DIS_BUFF EQU 30H ;数码管缓冲显示单元首地址
JG EQU 40H ;PWM信号占空比数值 & 数码管位选循环次数存储地址
ORG 0000H
LJMP MAIN
ORG 000BH
LJMP IT0P
ORG 0100H
MAIN:MOV SP,#60H
MOV TMOD,#02H ;T0 方式2
MOV TL0,#0FEH
MOV TH0,#0FEH
MOV JG,#0 ;占空比为0%
MOV JG+1,#1
MOV JG+3,#1 ;数码管位选循环1次
MOV R5,JG
SETB P2.5 ;输出PWM信号(p2.5为信号输出,将p2.5给p2.7为正转,将p2.5给p2.6为反转)
SETB F0
SETB ET0
SETB EA
SETB TR0
LOOP:
LCALL KEY ;按键扫描
LCALL DISPLAY;数码管动态显示
LJMP LOOP
IT0P:DJNZ R5,PWM0
JB F0,S_LOW
SETB P2.5
SETB F0
MOV R5,JG
文章转自电设屋,资料百度网盘下载地址 https://www.aiesst.cn/share.html
目录
1207基于8086四种波形发生器仿真设计-微机原理汇编仿真资料