项目数据及源码
可在github下载:
https://github.com/chenshunpeng/Doc-scan
图像预处理
首先导入工具包
import numpy as np
import argparse
import cv2
设置命令行参数
# 构造参数解析并解析参数
# we instantiate the ArgumentParser object as ap(实例化)
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", default='./images/pic.jpg'
, required = False, help = "Path to the image to be scanned")
args = vars(ap.parse_args())
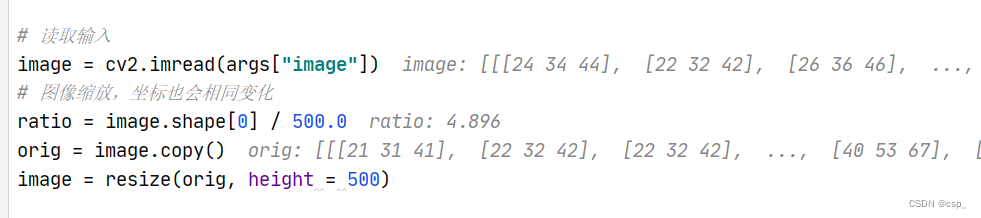
读取输入,对图像进行缩放
图像:
# 读取输入
image = cv2.imread(args["image"])
# 图像缩放,坐标也会相同变化
ratio = image.shape[0] / 500.0
orig = image.copy()
image = resize(orig, height = 500)
这里的ratio是4.896

在此给出resize函数定义:
def resize(image, width=None, height=None, inter=cv2.INTER_AREA):
dim = None
(h, w) = image.shape[:2]
if width is None and height is None:
return image
if width is None:
r = height / float(h)
dim = (int(w * r), height)
else:
r = width / float(w)
dim = (width, int(h * r))
resized = cv2.resize(image, dim, interpolation=inter)
return resized
对图像进行预处理,并展示预处理结果
# 转灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 高斯滤波,去除噪音点
gray = cv2.GaussianBlur(gray, (5, 5), 0)
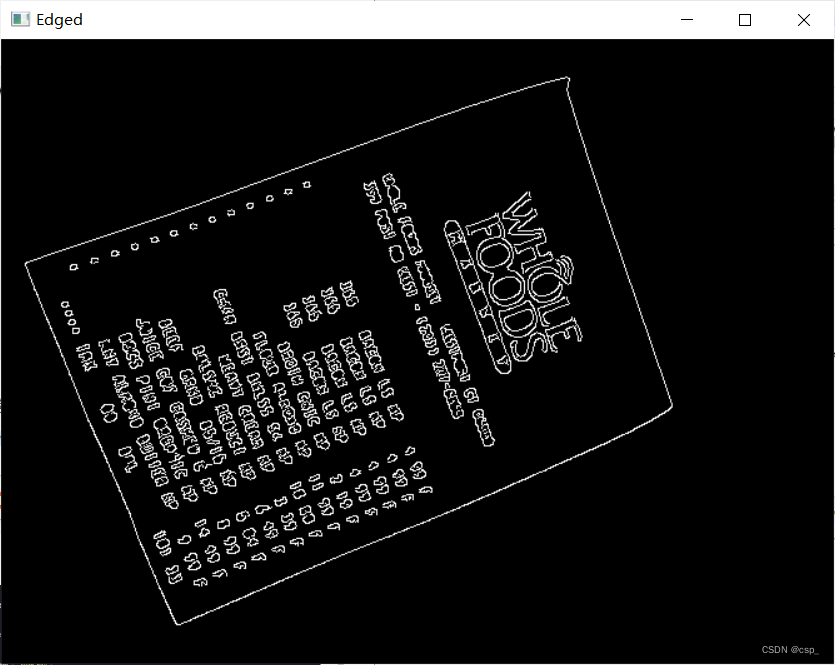
# 边缘检测
edged = cv2.Canny(gray, 75, 200)
# 展示预处理结果
print("STEP 1: 边缘检测")
cv2.imshow("Image", image)
cv2.imshow("Edged", edged)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果:
对于一些陌生的知识(如Canny边缘检测),可以在w3cschool看OpenCV的文档的翻译进行学习
(https://www.w3cschool.cn/opencv)

推荐有一定英语水平的直接看OpenCV官方文档(https://docs.opencv.org/3.4/index.html):
获取最优轮廓
轮廓提取
# cv.findContours()函数中有三个参数,第一个是源图像,第二个是轮廓检索模式,第三个是轮廓近似方法。
# 它输出轮廓和层次结构。Contours是图像中所有轮廓的Python列表。每个单独的轮廓都是对象边界点的 (x,y) 坐标的 Numpy 数组
cnts = cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)[0]
# 对轮廓按照面积从大到小排序,取前5个(先从小到大排序,之后取reverse翻转)
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:5]
在 Opencv4中,cv2.findContour()仅返回 2 个值:contours, hierachy,所以在这里用[0]得到第一个值
具体阅读这个网址:https://docs.opencv.org/4.x/d4/d73/tutorial_py_contours_begin.html
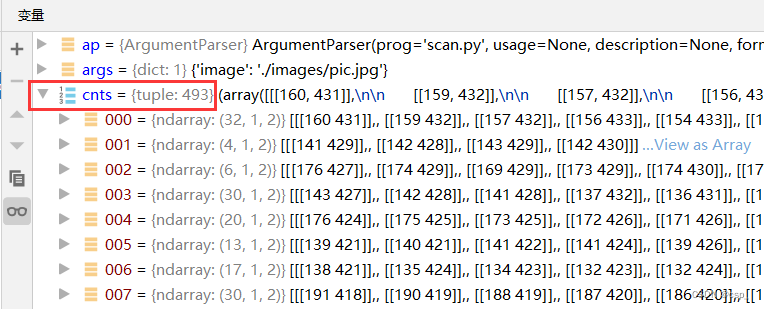
排序前有493个轮廓:
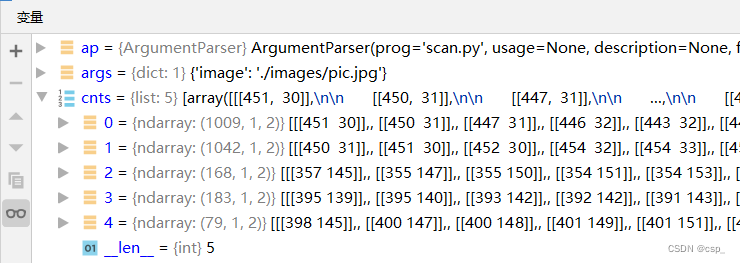
排序后取面积最大的5个轮廓(最外边的框架面积一定最大,所以周长也较大,点数也较多):
筛选轮廓
进行遍历轮廓,寻找最优轮廓
# 对screenCnt初始化,不然可能会有警告
screenCnt = [[0,0], [255,0], [255,255], [0,255]]
for c in cnts:
# 计算轮廓近似
peri = cv2.arcLength(c, True)
# cv2.approxPolyDP()的主要功能是把一个连续光滑曲线折线化,之后多边形逼近
# c表示输入的点集
# 其中第二个参数epsilon的作用:double epsilon:判断点到相对应的line segment的距离的阈值
# (距离大于此阈值则舍弃,小于此阈值则保留,epsilon越小,折线的形状越“接近”曲线。)
# True表示封闭的
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# 因为是文本行,返回的框至少应该是个四边形,只要找到那个最大的四边形,就可以退出了
if len(approx) == 4:
screenCnt = approx
break
v2.approxPolyDP函数了解可看:
Google:Contour Features(OpenCV官网教程)
这种函数类的知识推荐 Google 搜索,可以直接搜索到官方文档,权威一些
最优轮廓如下:
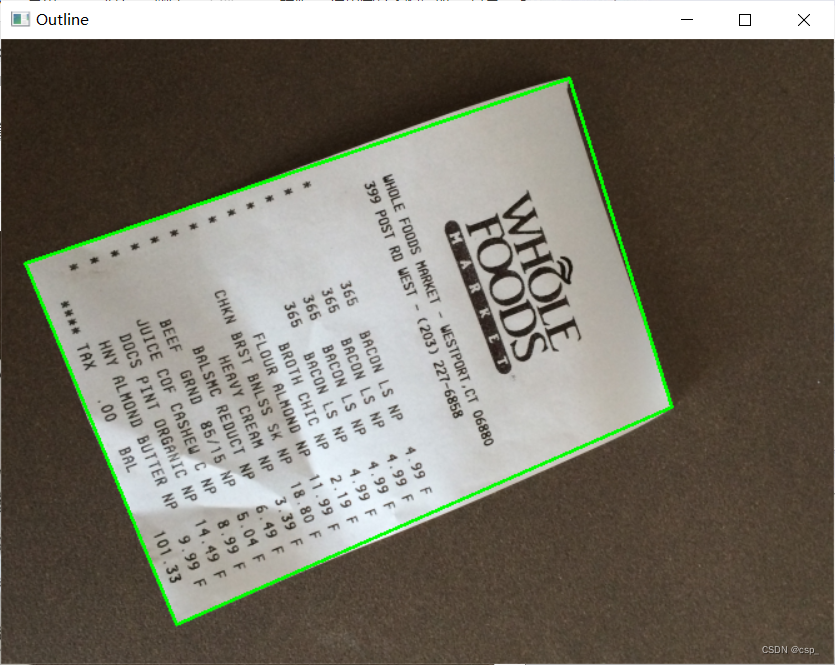
我们发现最优轮廓的确是那个面积最大的轮廓,但点数最不是最多的(1009<1042)
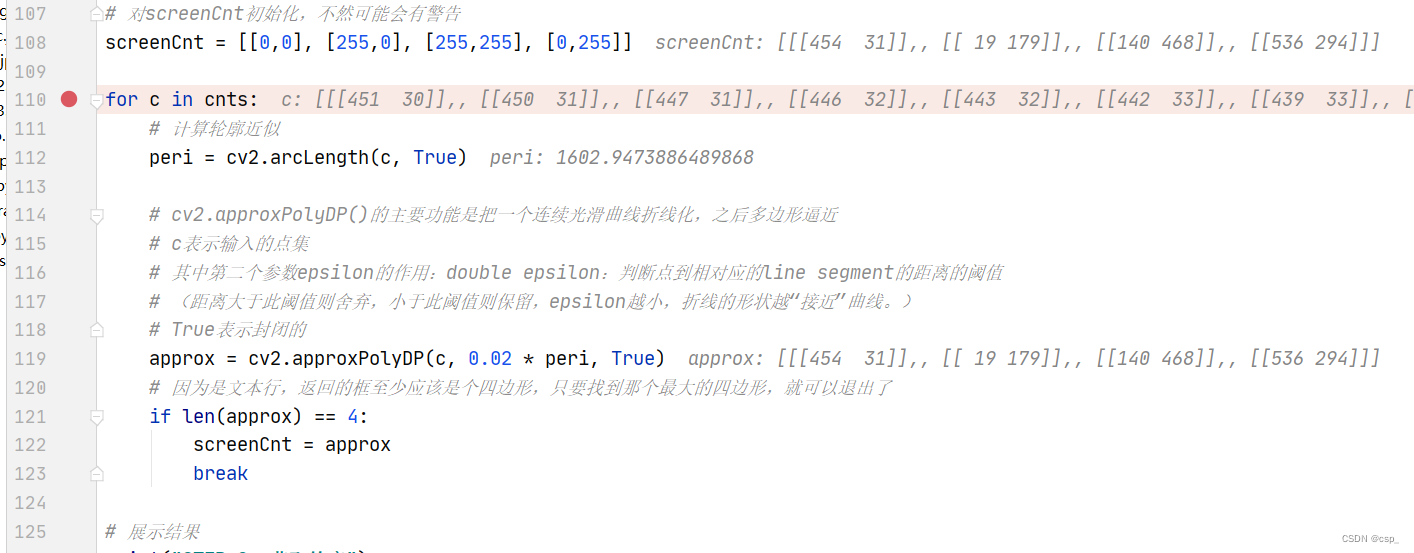
screenCnt的值:
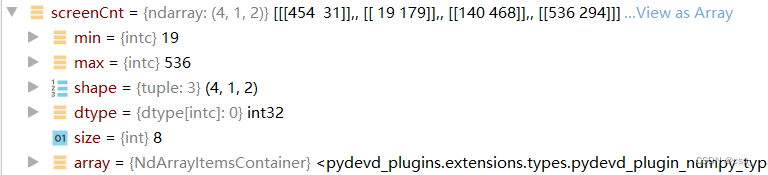
原始与变换坐标计算
通过screenCnt.reshape(4, 2)将其变为4x2的矩阵,之后* ratio得到的pts矩阵为:
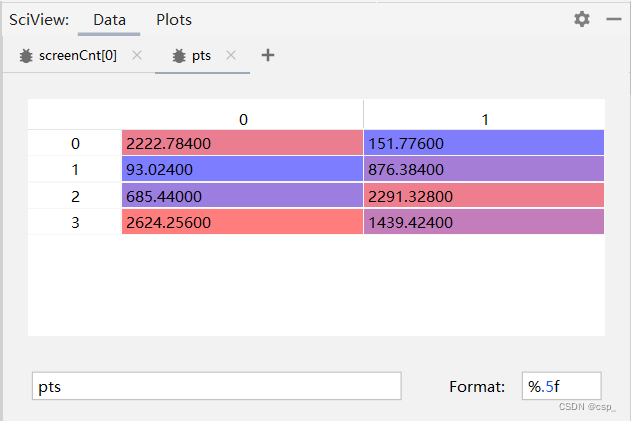
即:
{ t 1 ( 2222.784 , 151.776 ) t 1 ( 93.024 , 876.384 ) t 1 ( 685.44 , 2291.328 ) t 1 ( 2624.256 , 1439.424 ) \begin{cases}t_{1}\left( 2222.784,151.776\right) \\ t_{1}\left( 93.024, 876.384\right) \\ t_{1}\left(685.44,2291.328\right) \\ t_{1}(2624.256,1439.424) \end{cases} ⎩
⎨
⎧t1(2222.784,151.776)t1(93.024,876.384)t1(685.44,2291.328)t1(2624.256,1439.424)
这里4个点用 t 1 − 4 t_{1-4} t1−4 表示是因为这4个点的前后顺序不能代表其相对位置关系,两者没有任何关联
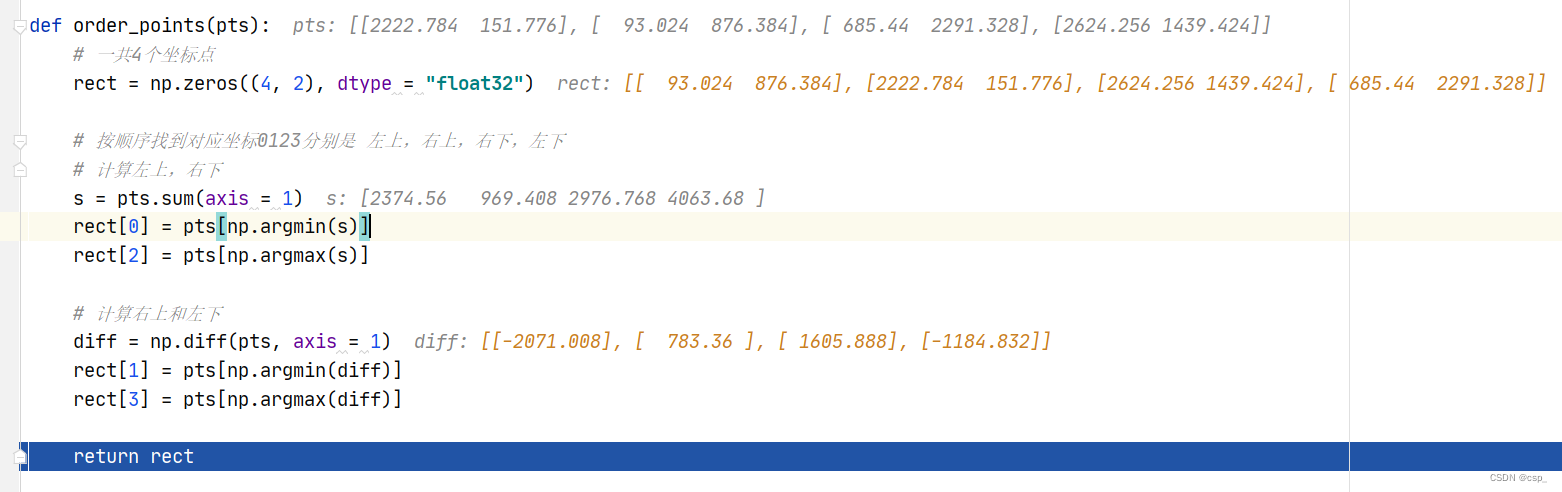
之后通过order_points函数获取输入坐标点
def order_points(pts):
# 一共4个坐标点
rect = np.zeros((4, 2), dtype = "float32")
# 按顺序找到对应坐标0123分别是 左上,右上,右下,左下
# 计算左上,右下
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# 计算右上和左下
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
过程如下:
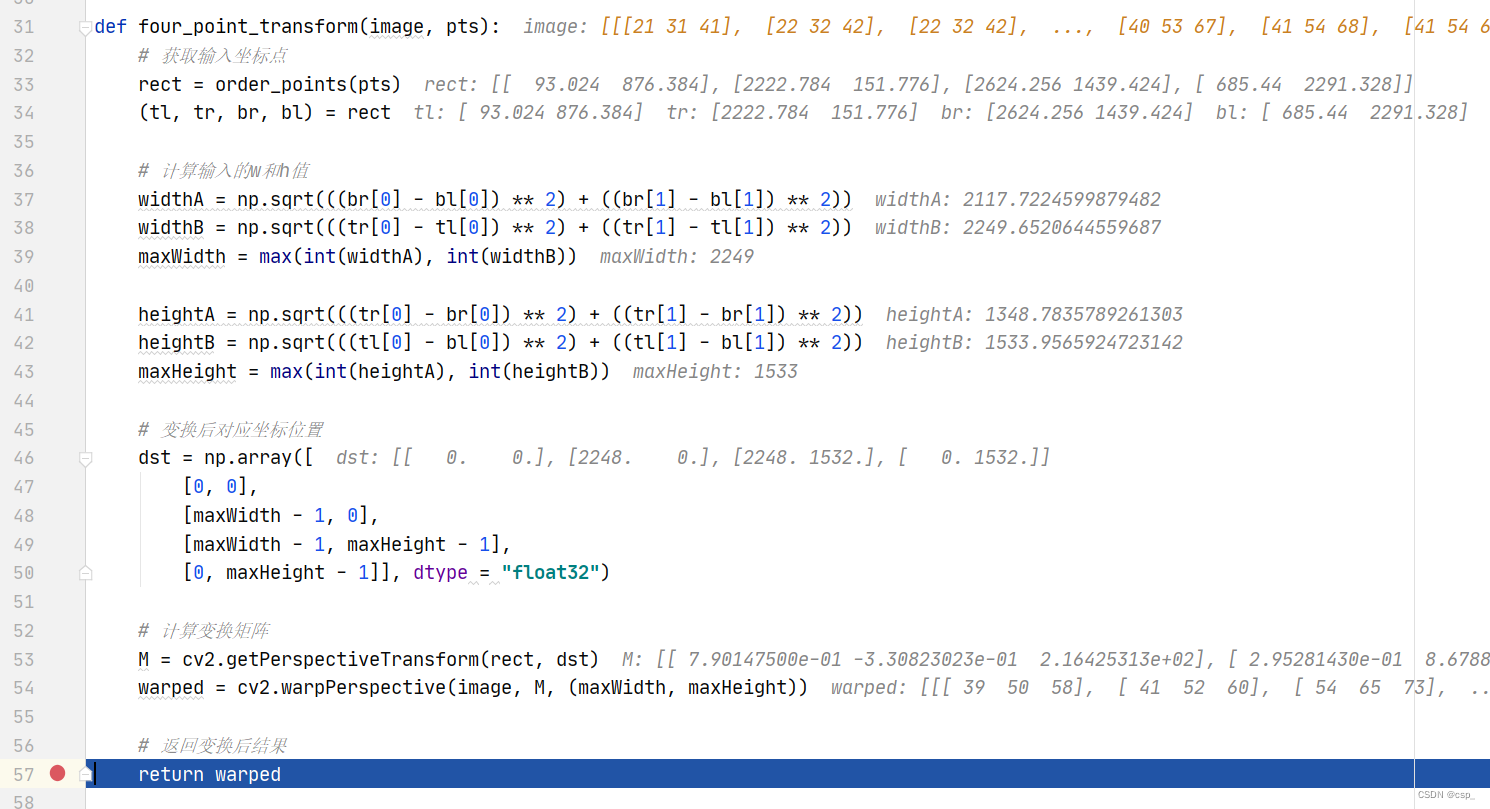
之后进行位置变换,给出函数four_point_transform:
def four_point_transform(image, pts):
# 获取输入坐标点
rect = order_points(pts)
(tl, tr, br, bl) = rect
# 计算输入的w和h值
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
# 变换后对应坐标位置
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
# 计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# 返回变换后结果
return warped
中间变量如下:
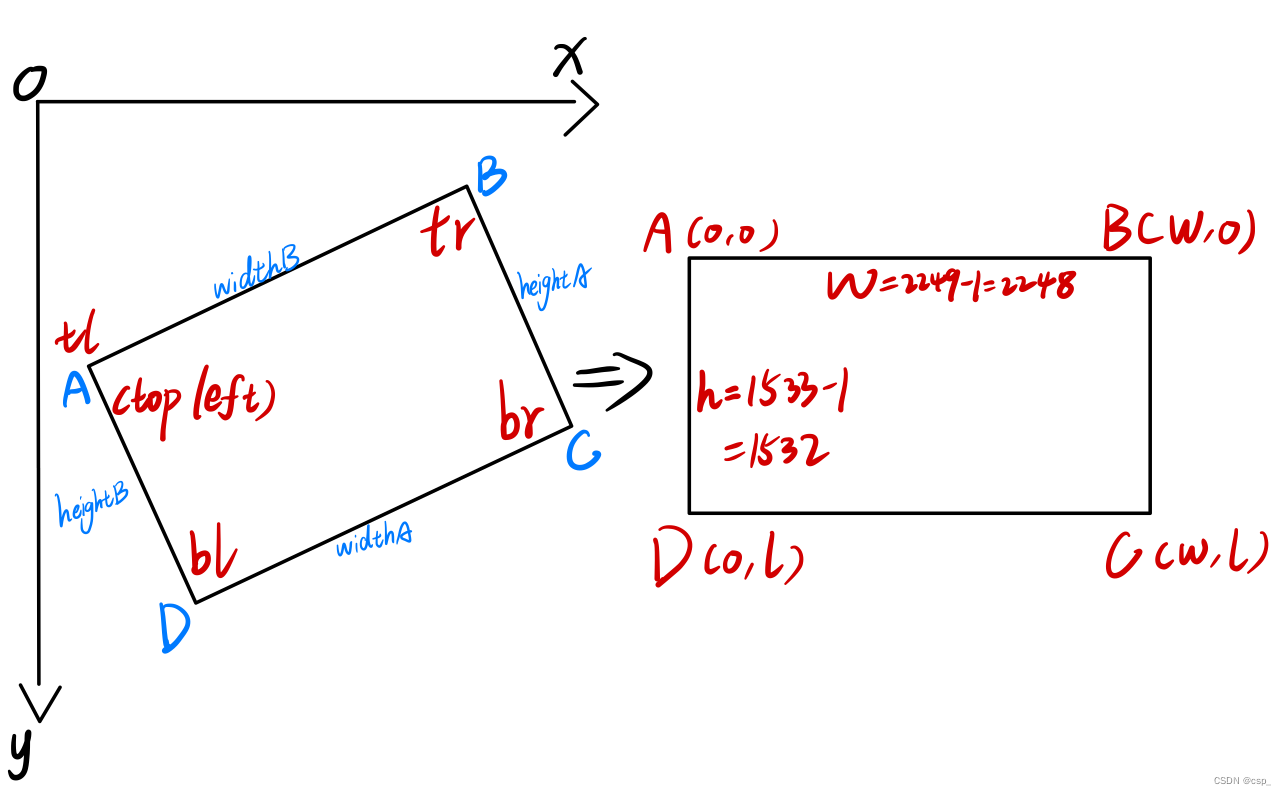
给出(tl, tr, br, bl)(变换前)的表达:
{ A t l ( 93.024 , 876.384 ) B t r ( 2222.784 , 151.776 ) C b r ( 2624.256 , 1439.424 ) D b l ( 685.44 , 2291.328 ) \begin{cases}A_{tl}\left( 93.024, 876.384\right) \\ B_{tr}\left( 2222.784,151.776\right) \\ C_{br}\left(2624.256,1439.424\right) \\ D_{bl}(685.44,2291.328) \end{cases} ⎩
⎨
⎧Atl(93.024,876.384)Btr(2222.784,151.776)Cbr(2624.256,1439.424)Dbl(685.44,2291.328)
给出dst(变换后)的表达:
{ A ( 0. , 0. ) B ( 2248. , 0. ) C ( 2248. , 1532. ) D ( 0. , 1532. ) \begin{cases}A\left(0.,0.\right) \\ B\left( 2248. , 0.\right) \\ C\left(2248. ,1532.\right) \\ D(0. ,1532.) \end{cases} ⎩
⎨
⎧A(0.,0.)B(2248.,0.)C(2248.,1532.)D(0.,1532.)
画个图大概是这样:
其中通过cv2.getPerspectiveTransform(rect, dst)函数求解变换矩阵
原理可看b站视频:透视变换矩阵求解推导(通俗易懂)
显示识别结果
图像处理
之后依次灰度化,二值化处理:
# 灰度,二值处理
warped = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
ref = cv2.threshold(warped, 100, 255, cv2.THRESH_BINARY)[1]
# 把ref写入scan.jpg
cv2.imwrite('scan.jpg', ref)
修改图片大小,并逆时针旋转90度
借鉴博客:
# 修改图片大小,同时图像逆时针旋转90度
# 获取图片,修改一下图片的大小
img = cv2.imread("scan.jpg")
# 注意需要制定返回值为img2,不能没有返回值
img2 = cv2.resize(img, (900, 600))
cv2.imshow("temp", img2)
cv2.waitKey(0)
# 对图片进行旋转
# 方法一
# img90 = np.rot90(img2)
# 方法二
# 绕任意点旋转
# 第一个参数旋转中心,第二个参数旋转角度,第三个参数:缩放比例
M = cv2.getRotationMatrix2D((450, 450), 90, 1)
# 仿射变化
# 第三个参数:输入图像的大小
img90 = cv2.warpAffine(img2, M, img2.shape[:2])
# (600, 900)与img2.shape[:2]等价
# img90 = cv2.warpAffine(img2, M, (600, 900))
cv2.imwrite('scan.jpg', img90)
# cv2.imshow("rotate", img90)
# cv2.waitKey(0)
# cv2.destroyAllWindows()
显示图像
print("STEP 3: 变换")
# cv2.imshow("Original", resize(orig, height = 650))
cv2.imshow("Scanned", resize(img90, height = 650))
cv2.waitKey(0)
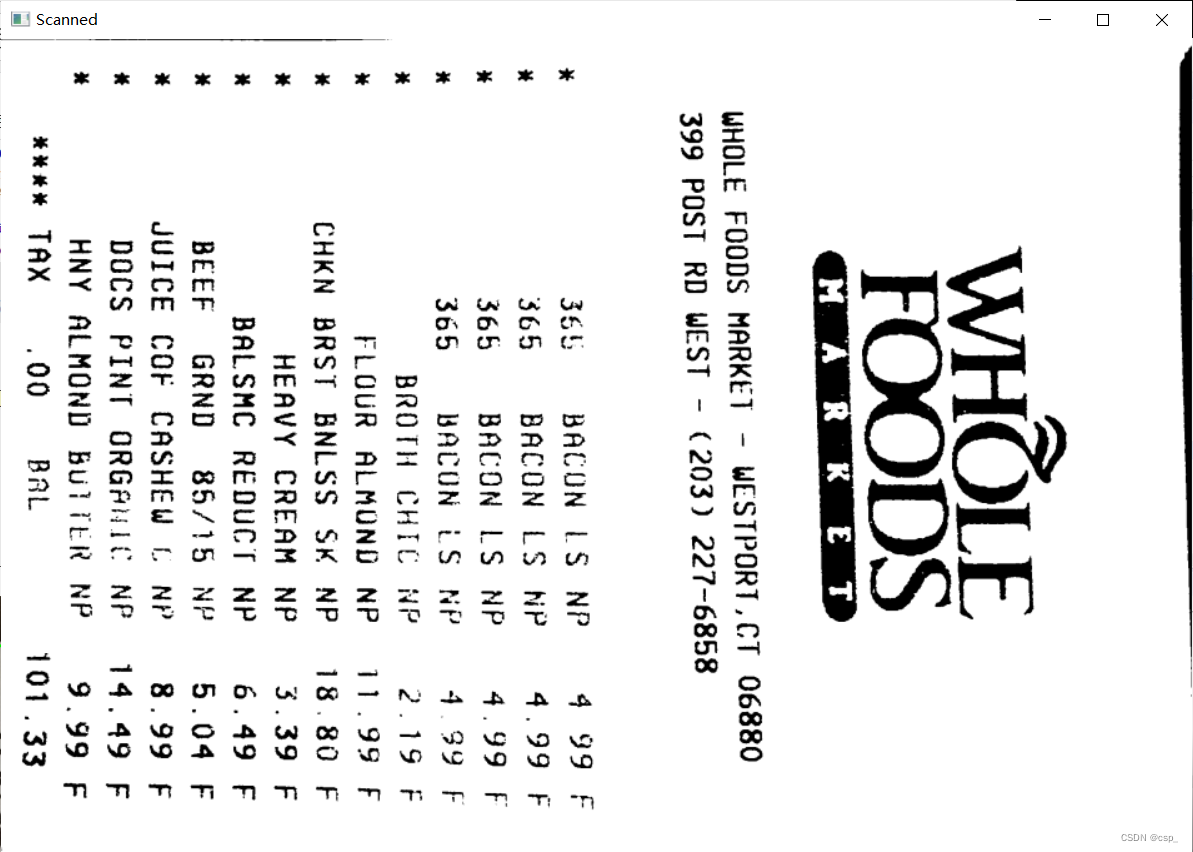
旋转前:
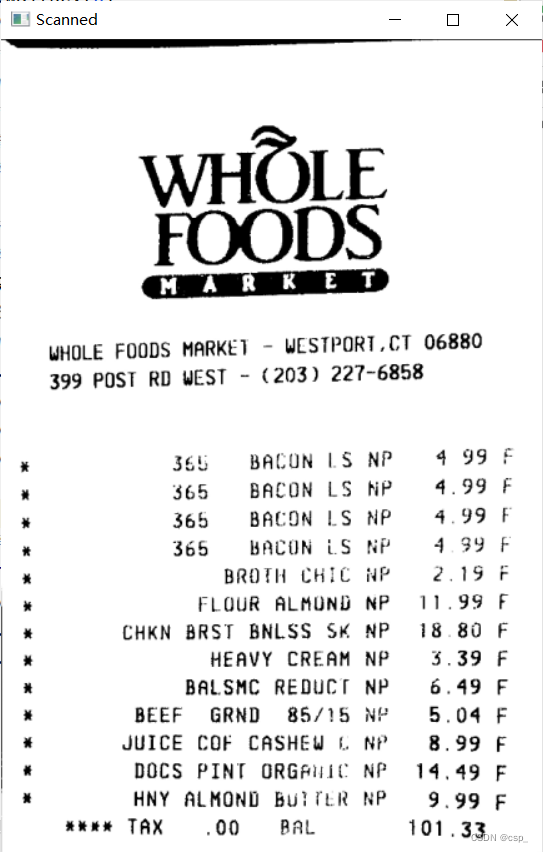
旋转后:
OCR识别
在这里用github开源OCR软件tesseract,可看:
https://github.com/tesseract-ocr/tesseract
下载地址:
https://digi.bib.uni-mannheim.de/tesseract/
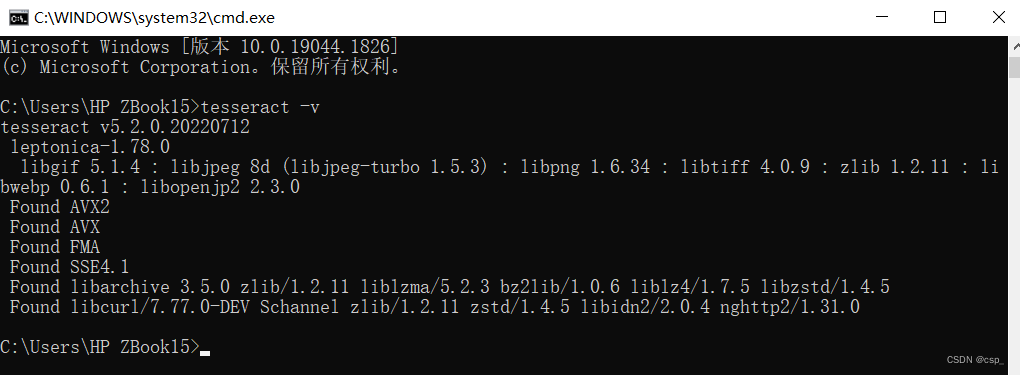
我的安装路径是:F:\soft_f\Tesseract-OCR,安装完记得配一下环境变量(我只配了用户变量),之后输入tesseract -v有(版本可高可低,我安装的是高版本):
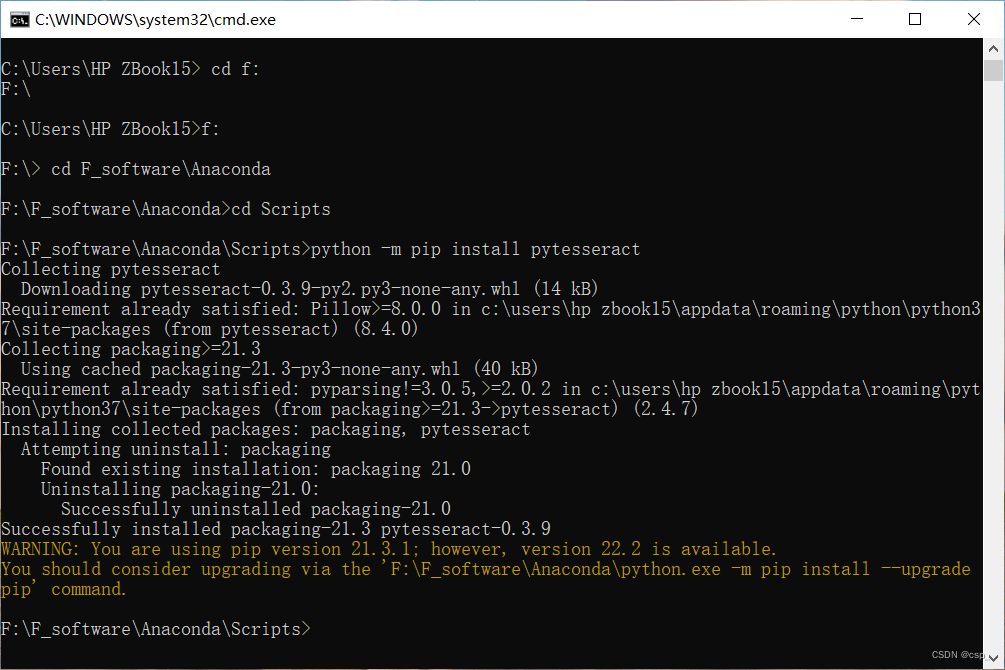
在python中pytesseract与安装在本地的tesseract-ocr.exe文件是一起使用的,因此需要pip install pytesseract,我的python环境在F:\F_software\Anaconda,安装如下:
在执行text = pytesseract.image_to_string(Image.open(filename))时发生了报错:
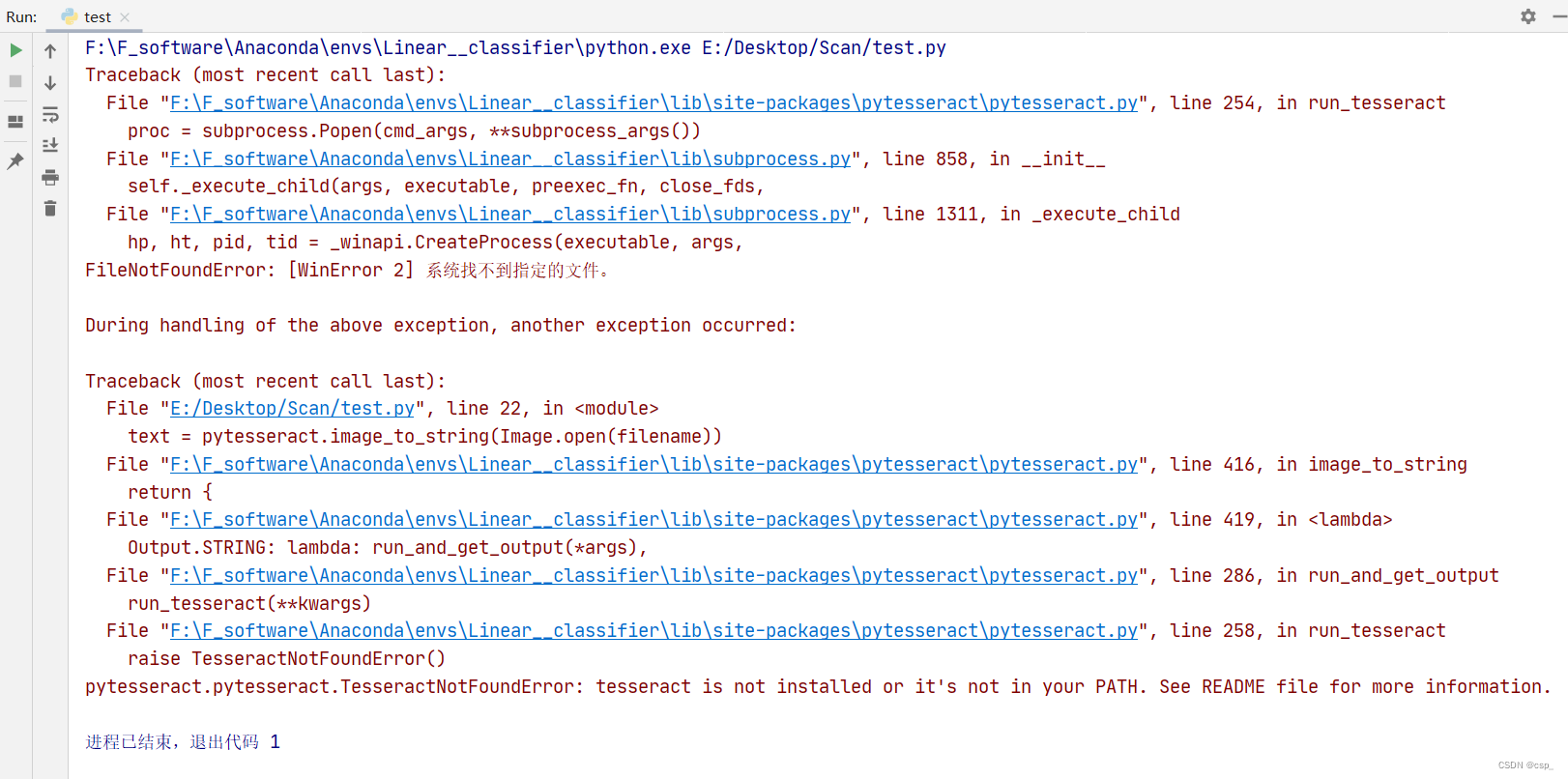
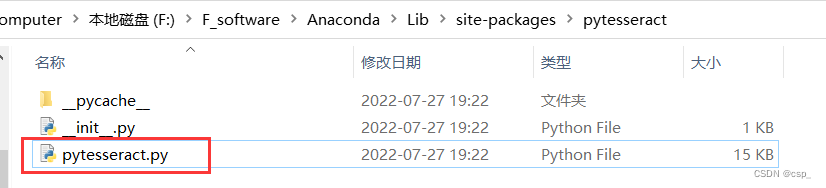
发现即使是配置了环境变量,也找不到tesseract的路径(原因未知QAQ),解决办法:打开F:\F_software\Anaconda\Lib\site-packages\pytesseract
修改一下tesseract_cmd = 'F:/soft_f/Tesseract-OCR/tesseract.exe':
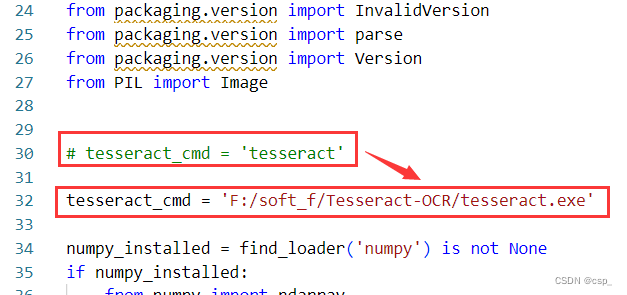
如果还是报错就重启一下电脑(有时候有些配置需要重启电脑才能生效)
这样就可以识别了,代码如下:
from PIL import Image
import pytesseract
import cv2
import os
preprocess = 'blur' #thresh
# 读入scan.py的输出结果图像:scan.jpg
image = cv2.imread('scan.jpg')
# 转灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 将一幅灰度图二值化
if preprocess == "thresh":
gray = cv2.threshold(gray, 0, 255,cv2.THRESH_BINARY | cv2.THRESH_OTSU)[1]
# 实现中值滤波
if preprocess == "blur":
gray = cv2.medianBlur(gray, 3)
filename = "{}.png".format(os.getpid())
cv2.imwrite(filename, gray)
text = pytesseract.image_to_string(Image.open(filename))
print(text)
os.remove(filename)
cv2.imshow("Image", image)
cv2.imshow("Output", gray)
cv2.waitKey(0)
识别结果:
=
Ce ee ee ee ee
WHOLE FOODS MARKE)
399 POST RD WEST - (203) 227-6858
WHOLE
FOODS
(mM AR KE T)
WESTPORT.CT 06880
Seb BALUN LS NP 4
$65 BACUN LS NP 499
$65 BREON LS NP 4
305 BACUN iS fi 4
BROTH CHIL ae é 19
HLQUR ALMUND NP ol 99
CHKN BRST BNLSS SK 8 18 80
HEAVY CREAM $.39
BALSMC REODUCT 6.49
BEEF GRND 85/15 5.04
JUICE COF CASHEW 8
DOCS PINI ORGAile NP 14.49
HNY ALMOND bulithk NP 9
eee TAX 00 Rat 101.33