无人驾驶汽车系统入门(十五)——ROS入门与实践(2)
上一节我们讲了ros的核心概念以及命令行的基本操作,在本节我们一起了解一下ros的基本编程,我们讲通过Husky模拟器完成一个简易的ROS包,通过实例了解ROS下的CMake文件的语法,然后使用Rviz可视化激光扫描的结果
创作不易,转载请注明出处:https://blog.csdn.net/AdamShan/article/details/79882668
我们可以使用C++和Python语言来编写ROS程序,两种语言的ROS编程语法很相似,C++更贴近于无人车实践,所以我们从roscpp入手开始ROS编程学习。
ROS C++ Client库(roscpp)
下面是使用ros c++ 库编写的一个hello world程序:
#include <ros/ros.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "hello_world");
ros::NodeHandle nodeHandle;
ros::Rate loopRate(10);
unsigned int count = 0;
while (ros::ok()) {
ROS_INFO_STREAM("Hello World " << count);
ros::spinOnce();
loopRate.sleep();
count++;
}
return 0;
}看一下含义:
#include <ros/ros.h>引入ros的头文件,
ros::init(argc, argv, "hello_world");初始化ros,每个ros节点都应该最先调用这个方法,这个节点我们命名为hello_world;
ros::NodeHandle nodeHandle;为这个进程的节点创建一个句柄。第一个创建的 NodeHandle 会为节点进行初始化,最后一个销毁的 NodeHandle 则会释放该节点所占用的所有资源。
ros::Rate loopRate(10);ros::Rate是一个用于以指定的频率循环的辅助类,在这里我们循环的频率是10Hz
while(ros::ok()){...}这个循环语句会以我们之前在rate对象中指定的频率循环执行,其中 ros::ok() 会在ros节点结束运行时返回false从而使循环终止,在如下几种情况下ros::ok()会返回false:
- SIGINT 被触发 (Ctrl-C)
- 被另一同名节点踢出 ROS 网络
- ros::shutdown() 被程序的另一部分调用
- 节点中的所有 ros::NodeHandles 都已经被销毁
在循环体中,有一条ros::spinOnce();语句,在这个简单的程序中,spinOnce()并没有意义,这条语句的作用在于,当我们订阅某个话题的时候,执行这条语句意味着处理一次回调,我们会在后面详细讨论。
节点句柄
有四种定义节点句柄的语法:
1. 默认的公共句柄:nodeHandle = ros::NodeHandle();
2. 私有句柄:nodeHandle = ros::NodeHandle("~");
3. 命名空间句柄:nodeHandle = ros::NodeHandle("adam");
4. 全局句柄(不推荐使用):nodeHandle = ros::NodeHandle("/");
使用这四种定义句柄的方式的节点在订阅一个主题的时候,分别订阅的是下列主题:
/namespace/topic/namespace/node/topic/namespace/adam/topic/topic
ROS中的Logging方法
在ros节点中,我们不提倡直接使用C++的Logging语法,一般我们会使用ROS_INFO来代替标准输出std:cout,ROS_INFO会自动将信息发送到命令行,log文件以及 /rosout 主题上;
当然,还有其他的Logging级别,比如说 ROS_WARN , ROS_ERROR等。同时,ROS还提供了printf 风格和 stream 风格的方法,使用如下:
ROS_INFO("Hello World %d", count);
ROS_INFO_STREAM("Hello World " << count);如果你使用ROS_INFO但是在屏幕上没有找到你要打印的信息,通常来说,除了检查代码逻辑以外,你还应该检查一下launch文件中output标签的值是否设置为screen。
编写基本的发布者和订阅者
下面的代码是一个简单的订阅节点:
#include "ros/ros.h"
#include "std_msgs/String.h"
void chatterCallback(const std_msgs::String& msg)
{
ROS_INFO("I heard: [%s]", msg.data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle nodeHandle;
ros::Subscriber subscriber =
nodeHandle.subscribe("chatter",10,chatterCallback);
ros::spin();
return 0;
}节点通过调用句柄的 subscribe 方法定义一个订阅器,当订阅的主题收到消息的时候,回调函数 chatterCallback 将被调用,在这里,spin 的作用就是保持节点对话题的监听,使得程序不会直接执行到 return 0;
定义简单的发布节点和我们之前的hello world节点颇为相似:
#include <ros/ros.h>
#include <std_msgs/String.h>
int main(int argc, char **argv) {
ros::init(argc, argv, "talker");
ros::NodeHandle nh;
ros::Publisher chatterPublisher =
nh.advertise<std_msgs::String>("chatter", 1);
ros::Rate loopRate(10);
unsigned int count = 0;
while (ros::ok()) {
std_msgs::String message;
message.data = "hello world " + std::to_string(count);
ROS_INFO_STREAM(message.data);
chatterPublisher.publish(message);
ros::spinOnce();
loopRate.sleep();
count++;
}
return 0;
}其步骤为:
1)定义publisher
2)创建消息内容
3)在一个循环中以一定的频率发布消息
面向对象的节点编写
在实际工程中,代码大多以面向对象的形式组织,一个包下,使用一个 packagename_node.cpp 作为节点的入口,其定义了节点句柄,并且实例化一个处理类:
#include <ros/ros.h>
#include "my_package/MyPackage.hpp"
int main(int argc, char** argv)
{
ros::init(argc, argv, "my_package");
ros::NodeHandle nodeHandle("~");
my_package::MyPackage myPackage(nodeHandle);
ros::spin();
return 0;
}而节点中的ROS接口(发布器,订阅器)则定义在MyPackage.hpp和MyPackage.cpp中。应用到的具体算法(比如说无人车的识别检测算法),我们则定义在单独的算法类中。这种编程模式使得我们的算法部分和ROS编程(节点间通信)进一步解耦合,更符合软件工程的要求。
ROS中的参数服务
在机器人和无人车的编程中,虽然节点相互独立,但是我们往往还需要在运行的时候存储和取出一些全局的配置参数,ROS中提供了参数服务。这些参数可以被存储在launch文件中,也可以被存储的单独的YAML文件中。
我们可以在launch文件中定义参数:
<launch>
<node name="name" pkg="package" type="node_type">
<rosparam command="load"
file="$(find package)/config/config.yaml" />
</node>
</launch>在代码中,通过节点句柄的getParam(name, value_variable)方法获得参数,如果参数存在 getParam 会返回true并将值传递给value_variable,下面是一个在C++中使用ROS参数的示例:
ros::NodeHandle nodeHandle("~");
std::string topic;
if (!nodeHandle.getParam("topic", topic)) {
ROS_ERROR("Could not find topic parameter!");
}基于Husky机器人的小案例
我们以面向对象的编程方式编写一个package,在编程过程中同时讲解Cmake文件的常用的语法。
在 ~/catkin_ws/src 中创建建一个名字为 husky_highlevel_controller 的包,并且新创建的包依赖 roscpp 和 sensor_msgs。
cd src
catkin_create_pkg husky_highlevel_controller roscpp sensor_msgs我们在husky_highlevel_controller/src下创建两个源文件,分别命名为 husky_highlevel_controller_node.cpp 和 husky_controller.cpp,在include/husky_high_level_controller/目录下创建头文件 husky_controller.hpp
修改CMakeLists.txt如下:
cmake_minimum_required(VERSION 2.8.3)
project(husky_high_level_controller)
add_definitions(-std=c++11)
find_package(catkin REQUIRED COMPONENTS
roscpp
sensor_msgs
)
catkin_package(
INCLUDE_DIRS include
# LIBRARIES ${PROJECT_NAME}
CATKIN_DEPENDS roscpp sensor_msgs
# DEPENDS system_lib
)
###########
## Build ##
###########
include_directories(
include
${catkin_INCLUDE_DIRS}
)
add_executable(${PROJECT_NAME}_node
src/${PROJECT_NAME}_node.cpp
src/husky_controller.cpp
)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES})
其中cmake_minimum_required指定catkin版本,project指定包的名称,在后面的语句中我们就可以通过${PROJECT_NAME}来访问这个包名称了。我们通过find_package找到我们构建程序时需要的其他CMake包,如果CMake通过find_package找到了包,它会创建包含所找到的包的信息的环境变量,这些环境变量描述了包的头文件,源文件路径以及包以来的库和库的路径。通常来说,我们把我们需要的CMake包作为catkin的 COMPONENTS,即我们把这些包的名称写在COMPONENTS之后,这么做的原因在于我们希望构建一个简单的环境变量集合,通过COMPONENTS找到的包的环境变量会被一并加到catkin_variables后面,这回在我们后面的介绍中派上用场。
catkin_package则是用于生产本项目的宏,用于其他的包使用find_package寻找我们这个包。这个函数必须位于add_library和add_executable这类目标函数之前,通常包含5个参数:
- INCLUDE_DIRS: 输出的头文件目录
- LIBRARIES: 输出的本项目库目录
- CATKIN_DEPENDS: 本项目以来的其他catkin项目
- DEPENDS: 本项目依赖的其他CMake项目
- CFG_EXTRAS: 一些配置选项
上面的CMake代码中Build后面的语句均用于指定构建目标,在指定构建目标之前,我们需要指定头文件和库文件的路径,语法分别是:
- Include路径:即构建需要的头文件的路径,通过
include_directories()指定 - Library路径:可执行文件构建需要的库的路径,通过
link_directories()指定
添加好头文件和库文件路径以后,我们指定需要构建的可执行目标,通过add_executable函数指定,add_executable函数的第一个参数是我们要构建的可执行目标的名称(自行指定),后面的参数则为源文件的路径,涉及多个源文件使用空格隔开即可。接着使用add_library指定构建该目标需要的库文件,第一个参数同样是我们构建的目标的名称,后面是目标依赖的库文件的列表。最后我们通过target_link_libraries将库link到可执行目标,其参数如下:
target_link_libraries(<目标名称>, <lib1>, <lib2>, ... , <libN>)在配置好包的构建文件以后,我们编写husky_highlevel_controller_node.cpp,这个源文件是我们一个节点的入口,申明我们节点的句柄:
#include <ros/ros.h>
#include "sensor_msgs/LaserScan.h"
#include "husky_high_level_controller/husky_controller.hpp"
#include <stdio.h>
#include <string.h>
#include <math.h>
#include <iostream>
using namespace std;
int main(int argc, char ** argv){
ros::init(argc, argv, "laser_listener");
ros::NodeHandle node_handle;
husky_controller::HuskyController test(node_handle);
return 0;
}节点中实例化了一个类,我们接着完成这个类的头文件和源文件,头文件:
#pragma once
#include <ros/ros.h>
#include "sensor_msgs/LaserScan.h"
namespace husky_controller{
class HuskyController {
public:
HuskyController(ros::NodeHandle &node_handle);
private:
void LaserCallBack(const sensor_msgs::LaserScan::ConstPtr &msg);
ros::NodeHandle &nodeHandle_;
ros::Subscriber laserSub_;
};
} // namespace husky_controllerhusky_controller的源文件:
#include "husky_high_level_controller/husky_controller.hpp"
namespace husky_controller{
HuskyController::HuskyController(ros::NodeHandle &node_handle):nodeHandle_(node_handle) {
std::string topic;
if(!nodeHandle_.getParam("/laser_listener/laser_topic", topic)){
ROS_ERROR("Load the laser scan topic param fail!!");
} else{
HuskyController::laserSub_ = nodeHandle_.subscribe(topic, 1, &HuskyController::LaserCallBack, this);
ros::spin();
}
}
void HuskyController::LaserCallBack(const sensor_msgs::LaserScan::ConstPtr &msg) {
unsigned long len = msg->ranges.size();
std::vector<float> filtered_scan;
for (int i = 0; i < len; ++i) {
if(std::isnormal(msg->ranges[i])){
filtered_scan.push_back(msg->ranges[i]);
}
}
for (int j = 0; j < filtered_scan.size(); ++j) {
ROS_INFO_STREAM(filtered_scan[j]);
}
}
} //namespace husky_controller这个节点的功能很简单,通过订阅/scan话题输出了Husky机器人的激光扫描数据中非零和无穷大的点,但是我们没有在代码中指定/scan这个话题,我们通过getParam()函数获得在launch文件中指定的参数来订阅这个话题,所以我们接下来写这个launch文件:
<?xml version="1.0"?>
<launch>
<include file="$(find husky_gazebo)/launch/husky_playpen.launch">
<arg name="laser_enabled" value="true"/>
</include>
<node pkg="husky_high_level_controller" type="husky_high_level_controller_node" name="laser_listener" output="screen">
<param name="laser_topic" value="/scan"/>
</node>
<node pkg="rviz" type="rviz" name="rviz"/>
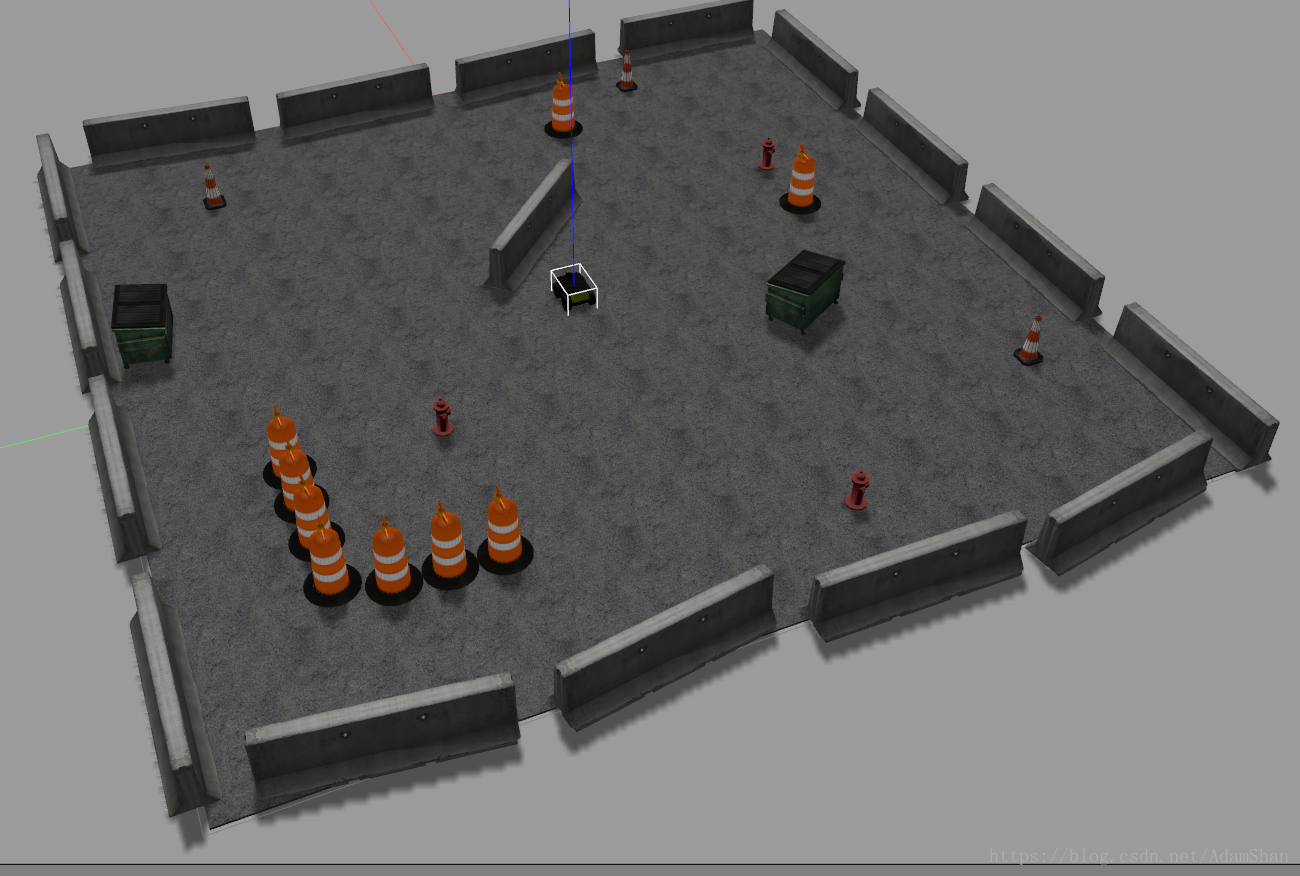
</launch>在这个launch文件中,我们给节点husky_high_level_controller指定了一个参数laser_topic, 同时我们include一个launch文件husky_playpen.launch,这个launch文件实际上是启动了一个Husky机器人的gazebo模拟环境,我们在引入这个launch文件的时候,传了一个参数laser_enabled给它,这个参数的值我们设置为“true”,这意味着我们打开了Husky机器人的激光。最后我们还添加了一个rviz节点,rviz是ROS官方的3D可视化工具,我们稍后使用Rviz来展现我们的激光扫描。
使用catkin_make编译我们的包,然后source setup文件,启动我们的launch文件:
cd ~/catkin_ws
catkin_make
source devel/setup.zsh
# for bash, you should replace the setup.zsh with setup.bash
roslaunch husky_high_level_controller high_controller.launch命令行会不断答应激光的扫描到的非零和无穷大的结果,同时打开了gazebo模拟环境和rviz工具,我们将rviz的Global Options中的Fixed Frame指定为odom:
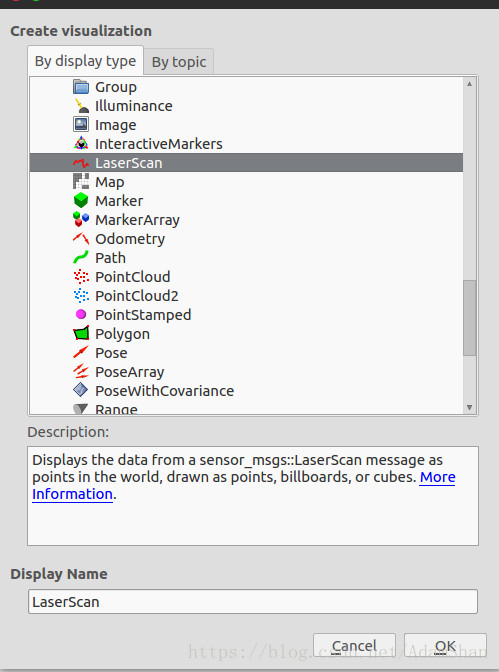
新增一个LaserScan的Display:
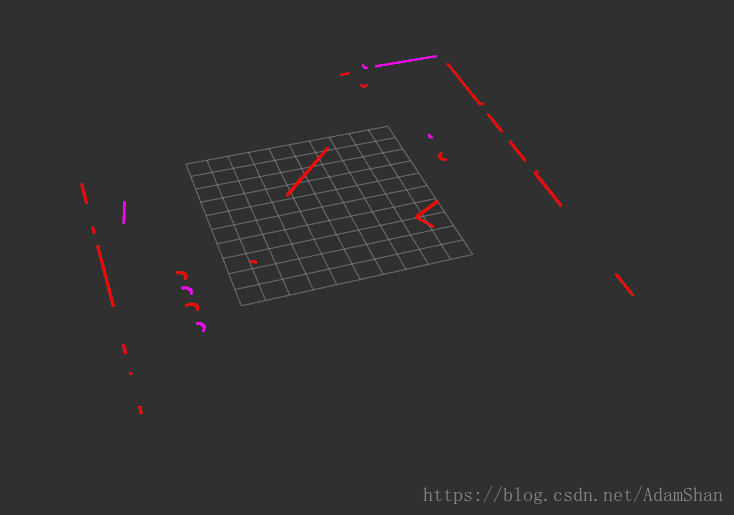
指定好LaserScan的topic为/scan并且将size设置为0.1m,激光的扫描结果:
机器人车在Gazebo中的情况: