无人驾驶实践入门——定位
定位的任务:
确定你的车辆在这张高精度地图上的位置
现有GPS定位1~3米,特殊情况精度更低,不能满足自动驾驶需求。
解决方案:
通过传感器比对地图内容,测量与静态障碍物之间距离来精确定位位置。
坐标系问题:
车辆坐标应与地图坐标间进行转换。
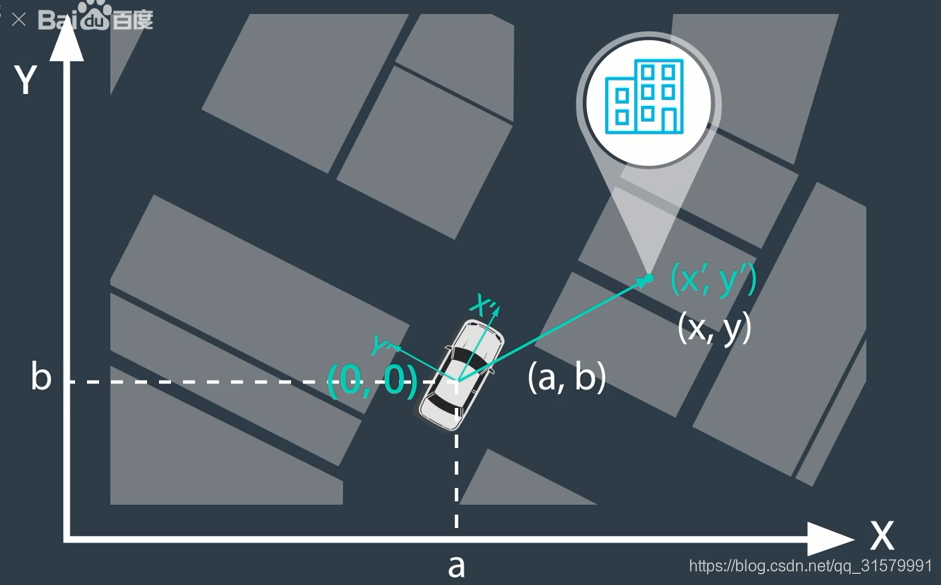
最终至少实现10cm的定位精度。
常见无人驾驶定位方法:
- GNSS
- RTK
- 惯性导航
- LiDAR定位
- 视觉定位
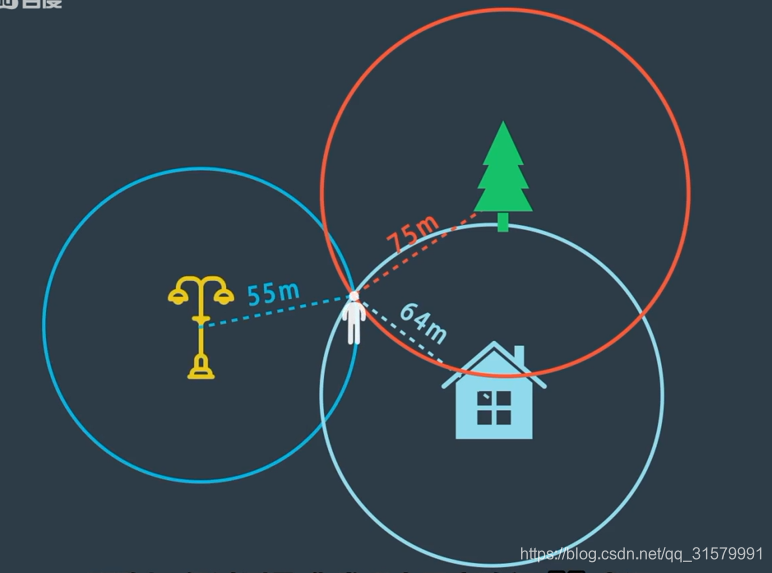
举例:野外迷路,你会怎么做?
通过静态地标定位,通过地图确定位置,该方案成为三角测量。这就是GPS定位(全球定位系统)的原理,GPS是一种GNSS(全球导航卫星)。
GPS定位
GPS组成
- 大约30颗卫星
- 世界各地的控制站,用于监视控制卫星,验证精确度
- GPS接收器,即手机等设备中的接收器,正常情况下每次至少接收4颗卫星信号
减小误差手段:
- 卫星配置高精度原子钟
- 实时运动定位(RTK),即基站定位
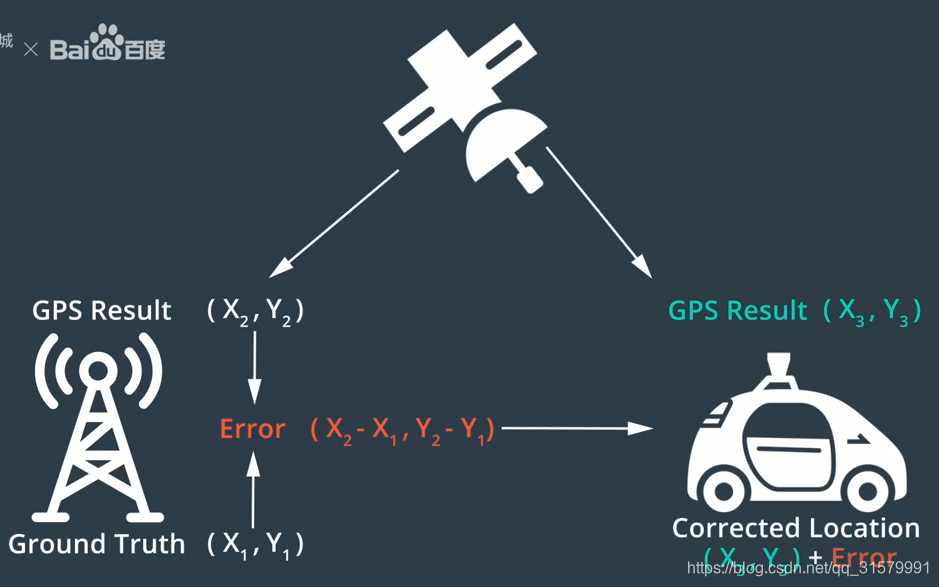
通过基站定位可定位精度达10cm
仍存问题:
- 高楼或障碍物阻碍信号
- GPS更新频率低(10Hz)
惯性导航
定位方案:
提供速度,加速度,初始位置等信息计算相对位移
测量方法:
加速度:三轴加速度计
全局坐标系转换:陀螺仪,测量旋转轴与三个外部平衡环的相对位置
它们两者组成了惯性测量单元(IMU)的主要组件。
特点:
- 高频率更新
- 运动误差随时间增加而积累
解决方案:
GPS弥补IMU运动误差
IMU弥补GPS更新频率
但仍不能解决环境条件差时的无法定位问题。
激光雷达定位
定位方案:
点云匹配,即将激光雷达数据与高精地图进行连续匹配
匹配点云算法
- 迭代最近点(ICP),通过旋转点云达到最小误差
- 滤波算法(误差平方和算法SSD),消除冗余信息,Apollo采用直方图滤波
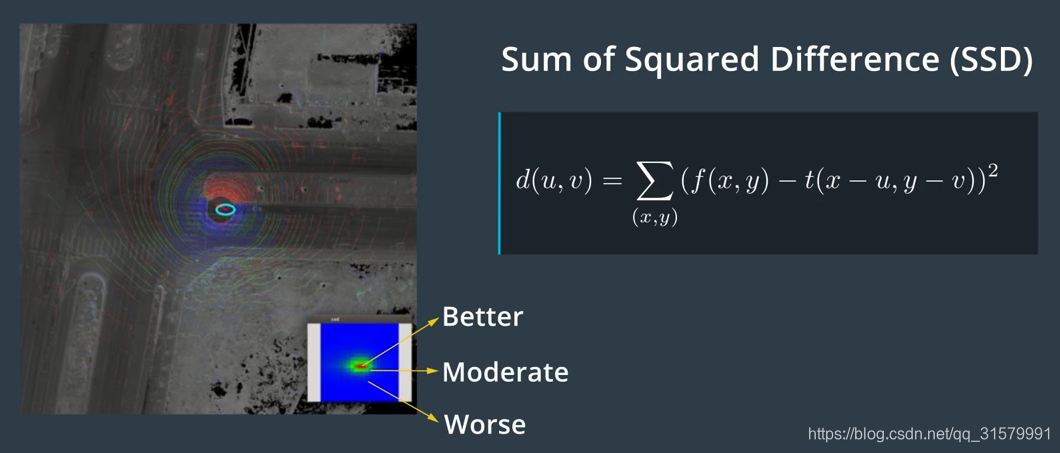
- 卡尔曼滤波,根据过去和当前状态预测未来
特点:
- 稳健性好
- 高精度地图更新困难
视觉定位
实现原理:
将摄像头图像信息与地图进行对比,通过概率确定,即粒子滤波方法
匹配对象:
树、车道线等静态参照物
特点:
- 图像数据容易获得
- 缺乏三维信息且对三维信息较为依赖
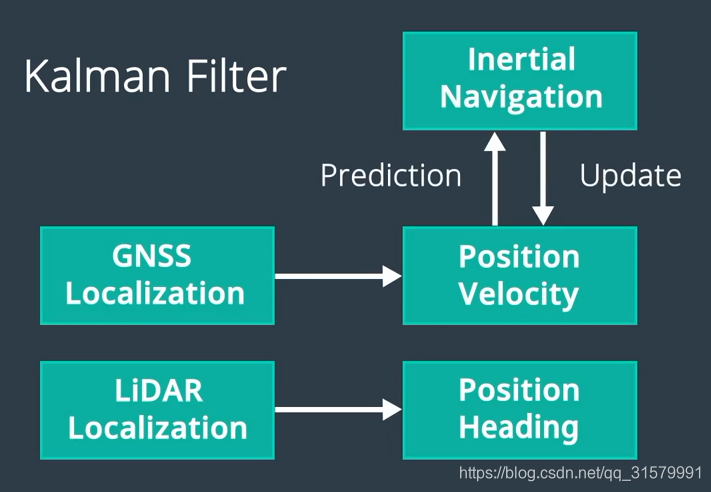
Apollo定位系统
基于GPS、IMU、激光雷达的多传感器融合定位,提高了稳定性的精确性。
GNSS定位输出位置和速度信息,LiDAR输出位置和行进方向信息,经过卡尔曼滤波结合。
惯性导航用于卡尔曼滤波的预测,GNSS和LiDAR用于卡尔曼滤波的结果更新。