《MATLAB智能算法30个案例》:第10章 基于粒子群算法的多目标搜索算法
1. 前言
《MATLAB智能算法30个案例分析》是2011年7月1日由北京航空航天大学出版社出版的图书,作者是郁磊、史峰、王辉、胡斐。本书案例是各位作者多年从事算法研究的经验总结。书中所有案例均因国内各大MATLAB技术论坛网友的切身需求而精心设计,其中不少案例所涉及的内容和求解方法在国内现已出版的MATLAB书籍中鲜有介绍。《MATLAB智能算法30个案例分析》采用案例形式,以智能算法为主线,讲解了遗传算法、免疫算法、退火算法、粒子群算法、鱼群算法、蚁群算法和神经网络算法等最常用的智能算法的MATLAB实现。
本书共给出30个案例,每个案例都是一个使用智能算法解决问题的具体实例,所有案例均由理论讲解、案例背景、MATLAB程序实现和扩展阅读四个部分组成,并配有完整的原创程序,使读者在掌握算法的同时更能快速提高使用算法求解实际问题的能力。《MATLAB智能算法30个案例分析》可作为本科毕业设计、研究生项目设计、博士低年级课题设计参考书籍,同时对广大科研人员也有很高的参考价值。
《MATLAB智能算法30个案例分析》与《MATLAB 神经网络43个案例分析》一样,都是由北京航空航天大学出版社出版,其中的智能算法应该是属于神经网络兴起之前的智能预测分类算法的热门领域,在数字信号处理,如图像和语音相关方面应用较为广泛。本系列文章结合MATLAB与实际案例进行仿真复现,有不少自己在研究生期间与工作后的学习中有过相关学习应用,这次复现仿真示例进行学习,希望可以温故知新,加强并提升自己在智能算法方面的理解与实践。下面开始进行仿真示例,主要以介绍各章节中源码应用示例为主,本文主要基于MATLAB2015b(32位)平台仿真实现,这是本书第十章基于粒子群算法的多目标搜索算法实例,话不多说,开始!
2. MATLAB 仿真示例
打开MATLAB,点击“主页”,点击“打开”,找到示例文件
选中main.m,点击“打开”
main.m源码如下:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%功能:多目标perota优化问题示例
%环境:Win7,Matlab2015b
%Modi: C.S
%时间:2022-07-5
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 清空环境
clc
clear all
close all
tic
load data
%% 初始参数
objnum=size(P,1); %类中物品个数
weight=92; %总重量限制
%初始化程序
Dim=5; %粒子维数
xSize=50; %种群个数
MaxIt=200; %迭代次数
c1=0.8; %算法参数
c2=0.8; %算法参数
wmax=1.2; %惯性因子
wmin=0.1; %惯性因子
x=unidrnd(4,xSize,Dim); %粒子初始化
v=zeros(xSize,Dim); %速度初始化
xbest=x; %个体最佳值
gbest=x(1,:); %粒子群最佳位置
% 粒子适应度值
px=zeros(1,xSize); %粒子价值目标
rx=zeros(1,xSize); %粒子体积目标
cx=zeros(1,xSize); %重量约束
% 最优值初始化
pxbest=zeros(1,xSize); %粒子最优价值目标
rxbest=zeros(1,xSize); %粒子最优体积目标
cxbest=zeros(1,xSize); %记录重量,以求约束
% 上一次的值
pxPrior=zeros(1,xSize);%粒子价值目标
rxPrior=zeros(1,xSize);%粒子体积目标
cxPrior=zeros(1,xSize);%记录重量,以求约束
%计算初始目标向量
for i=1:xSize
for j=1:Dim %控制类别
px(i) = px(i)+P(x(i,j),j); %粒子价值
rx(i) = rx(i)+R(x(i,j),j); %粒子体积
cx(i) = cx(i)+C(x(i,j),j); %粒子重量
end
end
% 粒子最优位置
pxbest=px;rxbest=rx;cxbest=cx;
%% 初始筛选非劣解
flj=[];
fljx=[];
fljNum=0;
%两个实数相等精度
tol=1e-7;
for i=1:xSize
flag=0; %支配标志
for j=1:xSize
if j~=i
if ((px(i)<px(j)) && (rx(i)>rx(j))) ||((abs(px(i)-px(j))<tol)...
&& (rx(i)>rx(j)))||((px(i)<px(j)) && (abs(rx(i)-rx(j))<tol)) || (cx(i)>weight)
flag=1;
break;
end
end
end
%判断有无被支配
if flag==0
fljNum=fljNum+1;
% 记录非劣解
flj(fljNum,1)=px(i);flj(fljNum,2)=rx(i);flj(fljNum,3)=cx(i);
% 非劣解位置
fljx(fljNum,:)=x(i,:);
end
end
%% 循环迭代
for iter=1:MaxIt
% 权值更新
w=wmax-(wmax-wmin)*iter/MaxIt;
%从非劣解中选择粒子作为全局最优解
s=size(fljx,1);
index=randi(s,1,1);
gbest=fljx(index,:);
%% 群体更新
for i=1:xSize
%速度更新
v(i,:)=w*v(i,:)+c1*rand(1,1)*(xbest(i,:)-x(i,:))+c2*rand(1,1)*(gbest-x(i,:));
%位置更新
x(i,:)=x(i,:)+v(i,:);
x(i,:) = rem(x(i,:),objnum)/double(objnum);
index1=find(x(i,:)<=0);
if ~isempty(index1)
x(i,index1)=rand(size(index1));
end
x(i,:)=ceil(4*x(i,:));
end
%% 计算个体适应度
pxPrior(:)=0;
rxPrior(:)=0;
cxPrior(:)=0;
for i=1:xSize
for j=1:Dim %控制类别
pxPrior(i) = pxPrior(i)+P(x(i,j),j); %计算粒子i 价值
rxPrior(i) = rxPrior(i)+R(x(i,j),j); %计算粒子i 体积
cxPrior(i) = cxPrior(i)+C(x(i,j),j); %计算粒子i 重量
end
end
%% 更新粒子历史最佳
for i=1:xSize
%现在的支配原有的,替代原有的
if ((px(i)<pxPrior(i)) && (rx(i)>rxPrior(i))) ||((abs(px(i)-pxPrior(i))<tol)...
&& (rx(i)>rxPrior(i)))||((px(i)<pxPrior(i)) && (abs(rx(i)-rxPrior(i))<tol)) || (cx(i)>weight)
xbest(i,:)=x(i,:);%没有记录目标值
pxbest(i)=pxPrior(i);rxbest(i)=rxPrior(i);cxbest(i)=cxPrior(i);
end
%彼此不受支配,随机决定
if ~( ((px(i)<pxPrior(i)) && (rx(i)>rxPrior(i))) ||((abs(px(i)-pxPrior(i))<tol)...
&& (rx(i)>rxPrior(i)))||((px(i)<pxPrior(i)) && (abs(rx(i)-rxPrior(i))<tol)) || (cx(i)>weight) )...
&& ~( ((pxPrior(i)<px(i)) && (rxPrior(i)>rx(i))) ||((abs(pxPrior(i)-px(i))<tol) && (rxPrior(i)>rx(i)))...
||((pxPrior(i)<px(i)) && (abs(rxPrior(i)-rx(i))<tol)) || (cxPrior(i)>weight) )
if rand(1,1)<0.5
xbest(i,:)=x(i,:);
pxbest(i)=pxPrior(i);rxbest(i)=rxPrior(i);cxbest(i)=cxPrior(i);
end
end
end
%% 更新非劣解集合
px=pxPrior;
rx=rxPrior;
cx=cxPrior;
%更新升级非劣解集合
s=size(flj,1);%目前非劣解集合中元素个数
%先将非劣解集合和xbest合并
pppx=zeros(1,s+xSize);
rrrx=zeros(1,s+xSize);
cccx=zeros(1,s+xSize);
pppx(1:xSize)=pxbest;pppx(xSize+1:end)=flj(:,1)';
rrrx(1:xSize)=rxbest;rrrx(xSize+1:end)=flj(:,2)';
cccx(1:xSize)=cxbest;cccx(xSize+1:end)=flj(:,3)';
xxbest=zeros(s+xSize,Dim);
xxbest(1:xSize,:)=xbest;
xxbest(xSize+1:end,:)=fljx;
%筛选非劣解
flj=[];
fljx=[];
k=0;
tol=1e-7;
for i=1:xSize+s
flag=0;%没有被支配
%判断该点是否非劣
for j=1:xSize+s
if j~=i
if ((pppx(i)<pppx(j)) && (rrrx(i)>rrrx(j))) ||((abs(pppx(i)-pppx(j))<tol) ...
&& (rrrx(i)>rrrx(j)))||((pppx(i)<pppx(j)) && (abs(rrrx(i)-rrrx(j))<tol)) ...
|| (cccx(i)>weight) %有一次被支配
flag=1;
break;
end
end
end
%判断有无被支配
if flag==0
k=k+1;
flj(k,1)=pppx(i);flj(k,2)=rrrx(i);flj(k,3)=cccx(i);%记录非劣解
fljx(k,:)=xxbest(i,:);%非劣解位置
end
end
%去掉重复粒子
repflag=0; %重复标志
k=1; %不同非劣解粒子数
flj2=[]; %存储不同非劣解
fljx2=[]; %存储不同非劣解粒子位置
flj2(k,:)=flj(1,:);
fljx2(k,:)=fljx(1,:);
for j=2:size(flj,1)
repflag=0; %重复标志
for i=1:size(flj2,1)
result=(fljx(j,:)==fljx2(i,:));
if length(find(result==1))==Dim
repflag=1;%有重复
end
end
%粒子不同,存储
if repflag==0
k=k+1;
flj2(k,:)=flj(j,:);
fljx2(k,:)=fljx(j,:);
end
end
%非劣解更新
flj=flj2;
fljx=fljx2;
end
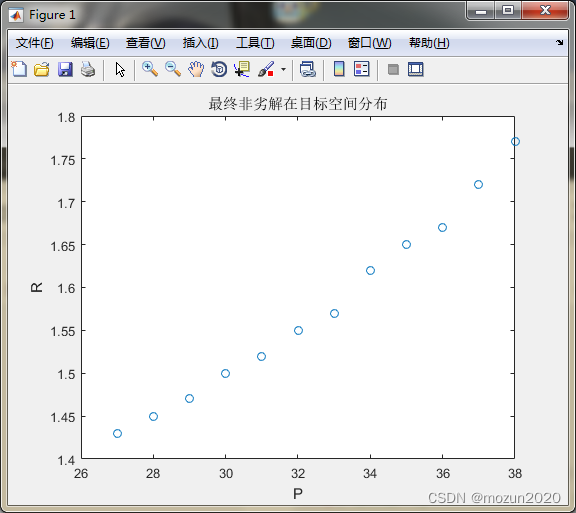
%绘制非劣解分布
plot(flj(:,1),flj(:,2),'o')
xlabel('P')
ylabel('R')
title('最终非劣解在目标空间分布')
disp('非劣解flj中三列依次为P,R,C')
toc
添加完毕,点击“运行”,开始仿真,输出仿真结果如下:
非劣解flj中三列依次为P,R,C
时间已过 0.783912 秒。
3. 小结
粒子群优化算法(Particle Swarm optimization,PSO)又翻译为粒子群算法、微粒群算法、或微粒群优化算法。是通过模拟鸟群觅食行为而发展起来的一种基于群体协作的随机搜索算法。通常认为它是群集智能 (Swarm intelligence, SI) 的一种。它可以被纳入多主体优化系统(Multiagent Optimization System, MAOS)。PSO算法是由Eberhart博士与kennedy博士提出。对本章内容感兴趣或者想充分学习了解的,建议去研习书中第十章节的内容。后期会对其中一些知识点在自己理解的基础上进行补充,欢迎大家一起学习交流。