首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
Halcon 第八章『相机标定与三维重建』◆第1节:线性代数和矩阵
企业开发
2022-07-01 23:15:01
阅读次数: 0
一、行列式介绍
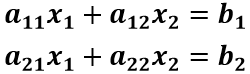
1、解方程组,标准的二元一次方程组
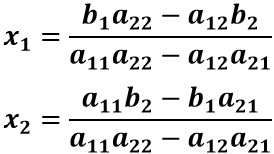
当
时,求得方程组的解为:
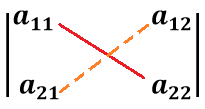
2、引入行列式概念
上述二阶行列式的定义,可以用对角线法则来记忆。
把
到
的实联线称为主对角线,
猜你喜欢
转载自
blog.csdn.net/qq_45336030/article/details/125436538
Halcon 第八章『相机标定与三维重建』◆第1节:线性代数和矩阵
Halcon 第八章『相机标定与三维重建』◆第3节:相机标定原理
Halcon 第八章『相机标定与三维重建』◆第4节:标定板介绍
Halcon 第八章『相机标定与三维重建』◆第2节:立体视觉的基础
Halcon 第八章『相机标定与三维重建』◆第5节:使用助手进行标定的步骤
Halcon 第八章『相机标定与三维重建』◆第7节:set_origin_pose变换的原因以及图像变换
Halcon 第八章『相机标定与三维重建』◆第6节:set_origin_pose算子的计算原理
Halcon 第八章『相机标定与三维重构』◆第7节:set_origin_pose变换的原因以及图像变换
halcon标定
halcon 相机标定
Halcon 单相机标定
Halcon 3D 三维重建
HALCON双目三维重建实验
Halcon标定与自标定
Halcon标定板标定
halcon和halcon XL适用的图像尺寸
Halcon标定步骤
halcon自标定
halcon 九点标定
halcon 相机外触发
Halcon相机标定程序注释
Halcon之单相机的标定
Halcon相机标定及畸变矫正
halcon一维测量
Halcon 2 维测量
halcon常用算子(1)
HALCON学习笔记1
HALCON算子1
Halcon 记录1
HALCON学习笔记 1
今日推荐
美国拟限制 AI 大模型出口中国和俄罗斯
苹果将与 OpenAI 达成协议,将 ChatGPT 应用于 iPhone
openKylin 社区生态委员会第六次会议圆满召开
阿里云正式发布通义千问 2.5
Python 3.13 发布首个 Beta:实验性自由线程模式和 JIT、改进交互式解释器
Stack Overflow 拿我的代码去训练 AI 大模型,还封了我的账号
Pop!_OS 的 COSMIC 桌面完成 App Store 上架工作
报告:Django 仍然是 74% 开发者的首选
《2024 年一季度互联网投融资运行情况》研究报告
15 年前上了“FFmpeg 耻辱柱”,今天他还得谢谢咱——腾讯QQPlayer一雪前耻?
TIOBE 5 月榜单:Fortran “复活”进入 Top 10
GCC 14.1 发布
周排行
curl的POST请求,封装方法
8.1.1. Integer Types
Java基础 Day05(个人复习整理)
Python - Django - 中间件 process_exception
小L的试卷
【Shell编程】 (函数)判断用户是否存在
python(css样式)
spring ant path 匹配原则 - 【笔记】
《JavaScript与JScript从入门到精通》(美)James.Jaworski.中译本.扫描版.pdf
Eclipse运行带参数的java程序
每日归档
更多
2024-05-12(0)
2024-05-11(38)
2024-05-10(38)
2024-05-09(35)
2024-05-08(42)
2024-05-07(14)
2024-05-06(40)
2024-05-05(0)
2024-05-04(7)
2024-05-03(19)