1.软件版本
matlab2017b
2.系统概述
首先,我们需要构建磁悬浮球系统模型的控制对象模型。这里,我们通过传递函数的形式来实现磁悬浮球的表达式,具体的推导过程如下所示:
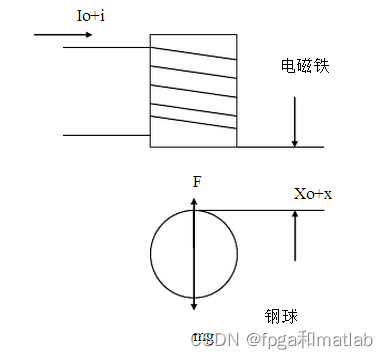
上图中,Xo为磁悬浮球的平衡位置的间隙,x为钢球在Y方向上的偏离平衡位置的位移。Io和i分别为电磁铁线圈的偏置电流和控制电流,F为电磁铁对钢球所产生的电磁铁,mg为钢球所受重力。为了保持平衡,合理F-mg必须为0.
假设平衡状态下,电流为i0,钢球和电磁铁之间的气隙为x0,那么这个时候有如下的表达式:
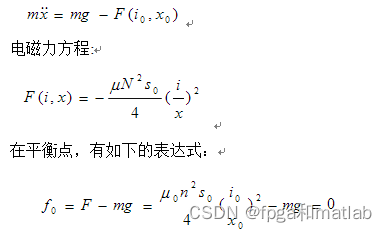
将钢球作为单质点来处理,当钢球质心在Y方向上有向上的偏移量x时,电磁铁 的吸力为

u0——真空或空气导磁率;
s 0——单个磁极面积;
n——电磁铁线圈匝数;
i0——线圈中的偏置电流;
x0——空气气隙厚度;
i——由x引起的控制电流分量;
x——转子在Y方向上偏离平衡位置的位移;
当钢球仅存在平移,且无干扰力存在时,此时转子的中心运动方程可表示为:

式中i是位移x而引起的控制电流,在平衡位置处有x=0,i=0,f0=0;
将上式在平衡位置处用泰勒公式展开,并去除二阶最小量得:

上述公式就是最后的可以得到磁悬浮球的运动微分方程。
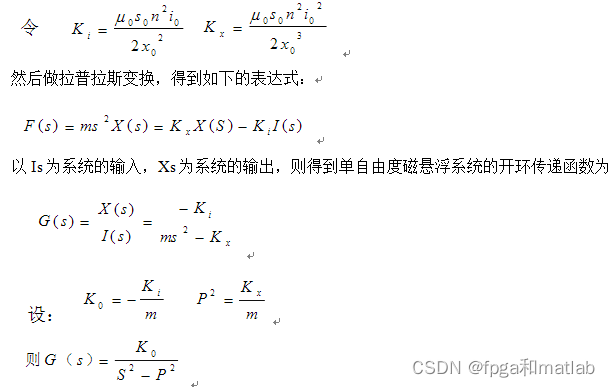
其中K0和P,通过预先给定的参数,可以获得,其为两个固定的常数,这个可以根据实际的参数自己设置,我们将上述的Gs作为控制器系统的控制对象进行控制处理。
3.梯度优化的混沌PSO程序
clc;
clear;
close all;
warning off;
RandStream.setDefaultStream(RandStream('mt19937ar','seed',1));
global yd y timef
%定义磁悬浮球传递函数
tmac = 1000;
den =[1,32,2,1];
wmax = 0.9;
wmin = 0.1;
c1 = 0.3;
c2 = 0.3;
%Kp的范围
amin = 0;
amax = 100;
%Ki的范围
bmin = 0;
bmax = 100;
%Kd的范围
cmin = 0;
cmax = 100;
%速度的范围
vmin =-0.1;
vmax = 0.1;
%粒子数目
Pop = 5;
BsJ = 0;
%迭代次数
T = 200;
%粒子初始化
for i=1:Pop
Kpid(i,1) = rand(1)*(amax-amin)+amin;
a_best(i) = Kpid(i,1);
Kpid(i,2) = rand(1)*(bmax-bmin)+bmin;
b_best(i) = Kpid(i,2);
Kpid(i,3) = rand(1)*(cmax-cmin)+cmin;
c_best(i) = Kpid(i,3);
va(i) =(vmax-vmin)*rand(1)+vmin;
vb(i) =(vmax-vmin)*rand(1)+vmin;
vc(i) =(vmax-vmin)*rand(1)+vmin;
Kpidi = Kpid(i,:);
[BsJ,Y] = func_pid_controller_fitness(Kpidi,tmac,den);
BsJi(i) = BsJ;
end
a = Kpid(:,1);
b = Kpid(:,2);
c = Kpid(:,3);
[minJi,index]= min(BsJi);
Ta_best = a(index);
Tb_best = b(index);
Tc_best = c(index);
for t=1:T
time(t) = t;
w = wmax-t*(wmax-wmin)/T;
for i=1:Pop
va(i) = w*va(i)+c1*rand(1)*(a_best(i)-Kpid(i,1))+c2*rand(1)*(Ta_best-Kpid(i,1));
Kpid(i,1) = Kpid(i,1)+va(i);
if Kpid(i,1) >= amax
Kpid(i,1) = amax;
end
if Kpid(i,1) <= amin
Kpid(i,1) = amin;
end
vb(i) = w*vb(i)+c1*rand(1)*(b_best(i)-Kpid(i,2))+c2*rand(1)*(Tb_best-Kpid(i,2));
Kpid(i,2) = Kpid(i,2)+vb(i);
if Kpid(i,2) >= bmax
Kpid(i,2) = bmax;
end
if Kpid(i,2) <= bmin
Kpid(i,2) = bmin;
end
vc(i) = w*vc(i)+c1*rand(1)*(c_best(i)-Kpid(i,3))+c2*rand(1)*(Tc_best-Kpid(i,3));
Kpid(i,3) = Kpid(i,3)+vc(i);
if Kpid(i,3) >= cmax
Kpid(i,3) = cmax;
end
if Kpid(i,3) <= cmin
Kpid(i,3) = cmin;
end
Kpidi = Kpid(i,:);
[p_new,Y] = func_pid_controller_fitness(Kpidi,tmac,den);
if p_new < BsJi(i)
BsJi(i) = p_new;
a_best(i) = Kpid(i,1);
b_best(i) = Kpid(i,2);
c_best(i) = Kpid(i,3);
end
if BsJi(i) < minJi
minJi = BsJi(i);
Ta_best = Kpid(i,1);
Tb_best = Kpid(i,2);
Tc_best = Kpid(i,3);
end
end
zbest = minJi;
%对粒子群最优位置进行混沌优化
ya(1) =(Ta_best-amin)/(amax-amin);
yb(1) =(Tb_best-bmin)/(bmax-bmin);
yc(1) =(Tc_best-cmin)/(cmax-cmin);
% ya(1) = Ta_best;
% yb(1) = Tb_best;
% yc(1) = Tc_best;
Kpids(1,1) = ya(1);
Kpids(1,2) = yb(1);
Kpids(1,3) = yc(1);
Ys = cell(Pop,1);
[fitness(1),Ys{1}] = func_pid_controller_fitness(Kpids(1,:),tmac,den);
%通过Logistic得到混沌序列
%混沌系数
u = 100;
for i=1:Pop-1
ya(i+1) = u*ya(i)*(1-ya(i));
yb(i+1) = u*yb(i)*(1-yb(i));
yc(i+1) = u*yc(i)*(1-yc(i));
%将混沌序列逆射到原解空间
ya(i+1) = amin+(amax-amin)*ya(i+1);
yb(i+1) = bmin+(bmax-bmin)*yb(i+1);
yc(i+1) = cmin+(cmax-cmin)*yc(i+1);
if ya(i+1) >= amax;ya(i+1) = amax;end;
if ya(i+1) <= amin;ya(i+1) = amin;end;
if yb(i+1) >= bmax;yb(i+1) = bmax;end;
if yb(i+1) <= bmin;yb(i+1) = bmin;end;
if yc(i+1) >= cmax;yc(i+1) = cmax;end;
if yc(i+1) <= cmin;yc(i+1) = cmin;end;
%计算混沌变量可行解序列的适应度值
Kpid(i+1,1) = ya(i+1);
Kpid(i+1,2) = yb(i+1);
Kpid(i+1,3) = yc(i+1);
[fitness(i+1),Ys{i+1}] = func_pid_controller_fitness(Kpid(i+1,:),tmac,den);
end
[ybestfitness,ybestindex] = min(fitness);
ybesta = ya(ybestindex);
ybestb = yb(ybestindex);
ybestc = yc(ybestindex);
Yf = Ys{ybestindex};
ran = 1+fix(rand()*Pop);
Kpid(ran,1) = ybesta;
Kpid(ran,2) = ybestb;
Kpid(ran,3) = ybestc;
yy(t) = minJi;
Jibest(t) = minJi;
A_best(t) = Ta_best;
B_best(t) = Tb_best;
C_best(t) = Tc_best;
end
figure;
plot(yy,'r','linewidth',2);
xlabel('迭代次数');
ylabel('J');
grid on
save R2.mat yy timef yd Yf
figure;
subplot(311);
plot(time,A_best,'b','linewidth',2);
xlabel('times(s)');
ylabel('Kp');
grid on
subplot(312);
plot(time,B_best,'b','linewidth',2);
xlabel('times(s)');
ylabel('Ki');
grid on
subplot(313);
plot(time,C_best,'b','linewidth',2);
xlabel('times(s)');
ylabel('Kd');
grid on
figure;
subplot(211);
plot(Jibest,'r','linewidth',2);
xlabel('迭代次数');
ylabel('J');
grid on
subplot(212);
plot(timef,yd,'r','linewidth',2);
hold on
plot(timef,y,'b','linewidth',2);
grid on
axis([0,2,0,1.2]);
xlabel('times(s)');
ylabel('position');
legend('Ideal position signal','Position signal tracking');4.仿真结论



5.参考文献
[1]何耀耀, 周建中, 杨俊杰,等. 混沌PSO梯级优化调度算法及实现[J]. 华中科技大学学报:自然科学版, 2009, 37(3):4.A06-26