1、内容简介
首先,应用D-H法对六自由度运动平台的运动学进行分析,并在Matlab/Simulink仿真集成环境中建立其位置逆解模型;然后利用Simulink下的SimMechanics工具集搭建好六自由度运动平台物理模型,并在Simulink下搭建起仿真验证系统;最后输入期望参考运动轨迹,加以仿真验证,误差较小,结果吻合,从而验证位置逆解模型的正确性。
280可以交流、咨询、答疑
2、内容说明
近年来,由于六自由度运动平台具有极为广泛的应用前景,引起了国内外科研机构、研究院校广泛的研究。六自由度运动平台,又称Stewart并联平台,stewart平台的研究始于1965年,德国工程师stewart提出六自由度的并联机构用来作为飞行模拟器[1]。目前经典stewart运动平台的机构主要由上下两个平台和六个可以伸缩的杆件及它们和上下平台相连接的铰链构成。其中,上平台为负载平台,可以移动;下平台通常为底座,固定在地面。Stewart并联平台可以通过六条支杆的伸缩运动使得负载平台可在工作范围内实现空间六个自由度的联合运动(即俯仰、侧倾、航偏转动以及前后、左右、上下平动),并具有刚度好,精度高,承载能力强,动态特性好等优点[2]。
六自由度运动平台的位置逆解的求解和仿真是进行机构运动控制和结构优化的基础,它对六自由度运动平台进行位姿控制时的各种应用场合均有直接的实用价值。而Matlab是一种高精度的科学计算工具,它将计算、可视化和编程集成在一个容易使用的环境中,其典型功能包括数学计算、建模和仿真、数据分析、研究和可视化、创建图形用户接口。simulink是matlab中的一个重要部分,是一个用来对动态系统进行建模、仿真和分析的软件包。Simulink下的工具集SimMechanics[3]是matlab6.5新增的机构系统模块集,它可以建立起机构的物理模型,并可以通过相应模块与Simulink模块或子系统相连接,进行联合测试仿真,为机构的运动学分析与建模实现提供了良好的技术基础。本文利用Simulink/Matlab集成开发环境实现位置逆解算法模型,并且通过在其环境下建立的六自由度运动平台物理模型进行了仿真验证。

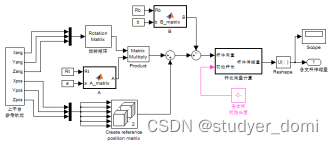
上平台参考轨迹模块用于上平台期望位资参数的输入,该模块中输入的上平台期望运动参数是动坐标系相对于经坐标系的旋转及平移变换量。输出参数Xang、Yang、Zang为上平台旋转姿态角,输出参数Xpos、Ypos、Zpos为上平台的位置坐标。上平台参考轨迹模块是一个子系统模块,打开该模块后,其结构如图4所示。这里信号源均设为正弦波信号,用Sine Wave模块,输出参考轨迹可以根据实际需求设置。

3、仿真分析
4、参考论文
略