1. 四个问题
- 解决什么问题
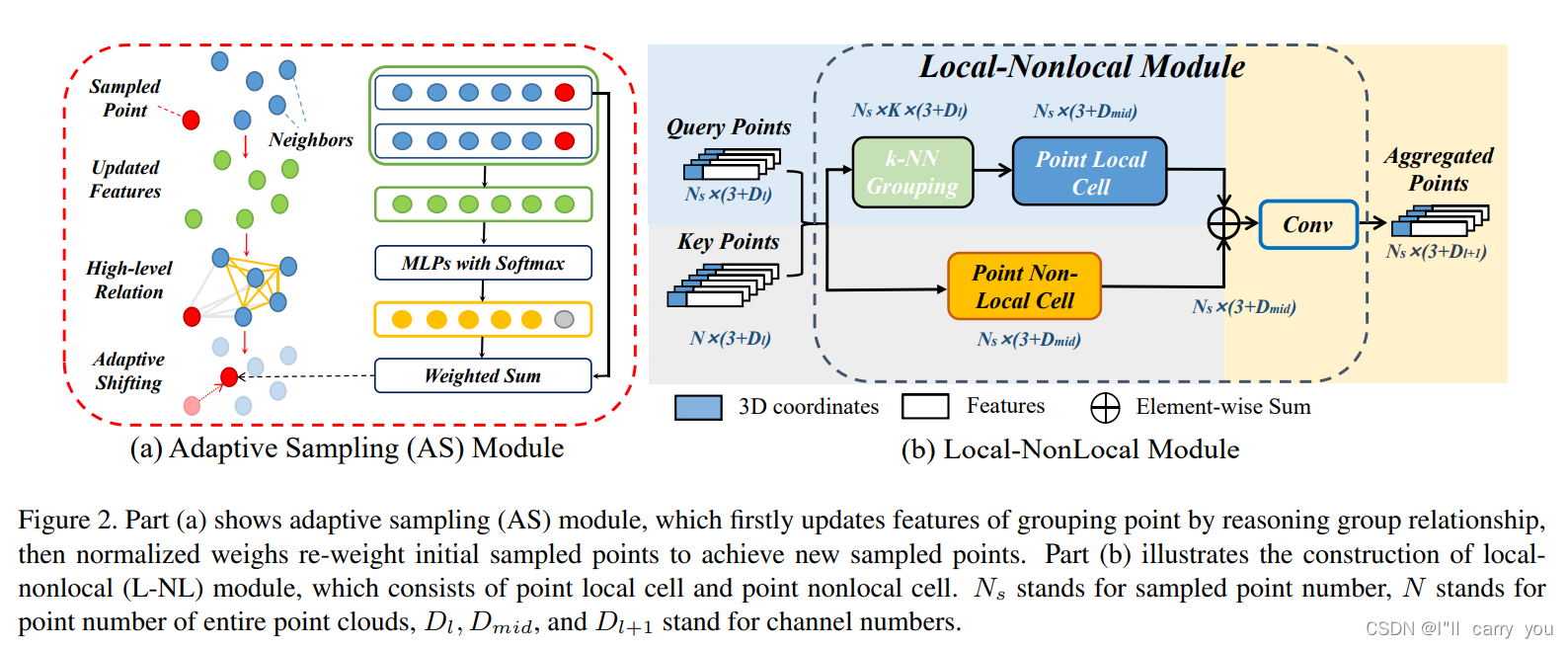
- 针对fps采样对噪声敏感的问题,提出自适应采样方法,看起来其实就是一个局部特征丰富模块
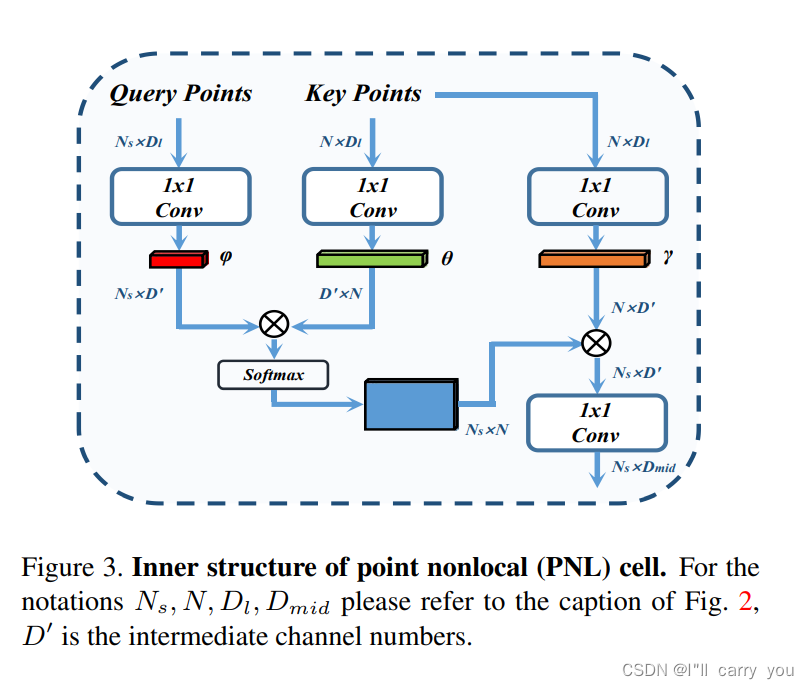
- 受non-local的启发,使用全局范围内的上下文信息,对采样点的特征进行增强
-
用了什么方法解决
见上 -
效果如何
ModelNet10 and 40

-
还存在什么问题
?
2. 论文介绍
2个模块:a + b,其中b包含了local + non-local
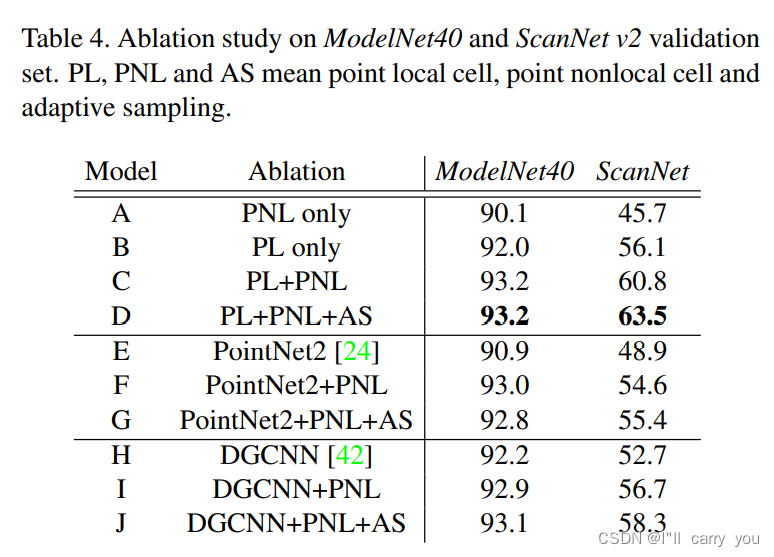
消融实验
3. 参考资料
PointASNL: 点云Adaptive Sampling与Nonlocal(CVPR 2020)
2020-CVPR-PointASNL
4. 收获
前置知识:PointConv, non-local
没读代码,不是很懂,反正核心是 Self-Attention
总体上,这篇文章演示了如何融合local、global范围内的feature,进行feature增强。比较特别的是,作者从“噪点“这个角度作为文章的出发点,如此一来,就有别于其它点云feature融合的文章了。
从代码的角度看,源码“融合“了多篇文章的代码:PointNet++, PointConv, KPConv, … 如果之前看过相关源码,理解本文应该不会太难。