Modeling Local Geometric Structure of 3D Point Clouds using Geo-CNN 速记
其他
2020-04-10 20:56:17
阅读次数: 0
广告
背景

- 作者认为直接以边向量通过MLP获得权重容易过拟合,因为边的几何结构多变,方差大;另外,直接映射至高维空间有可能丢失原有的几何结构,因此需要关注显式几何结构建模
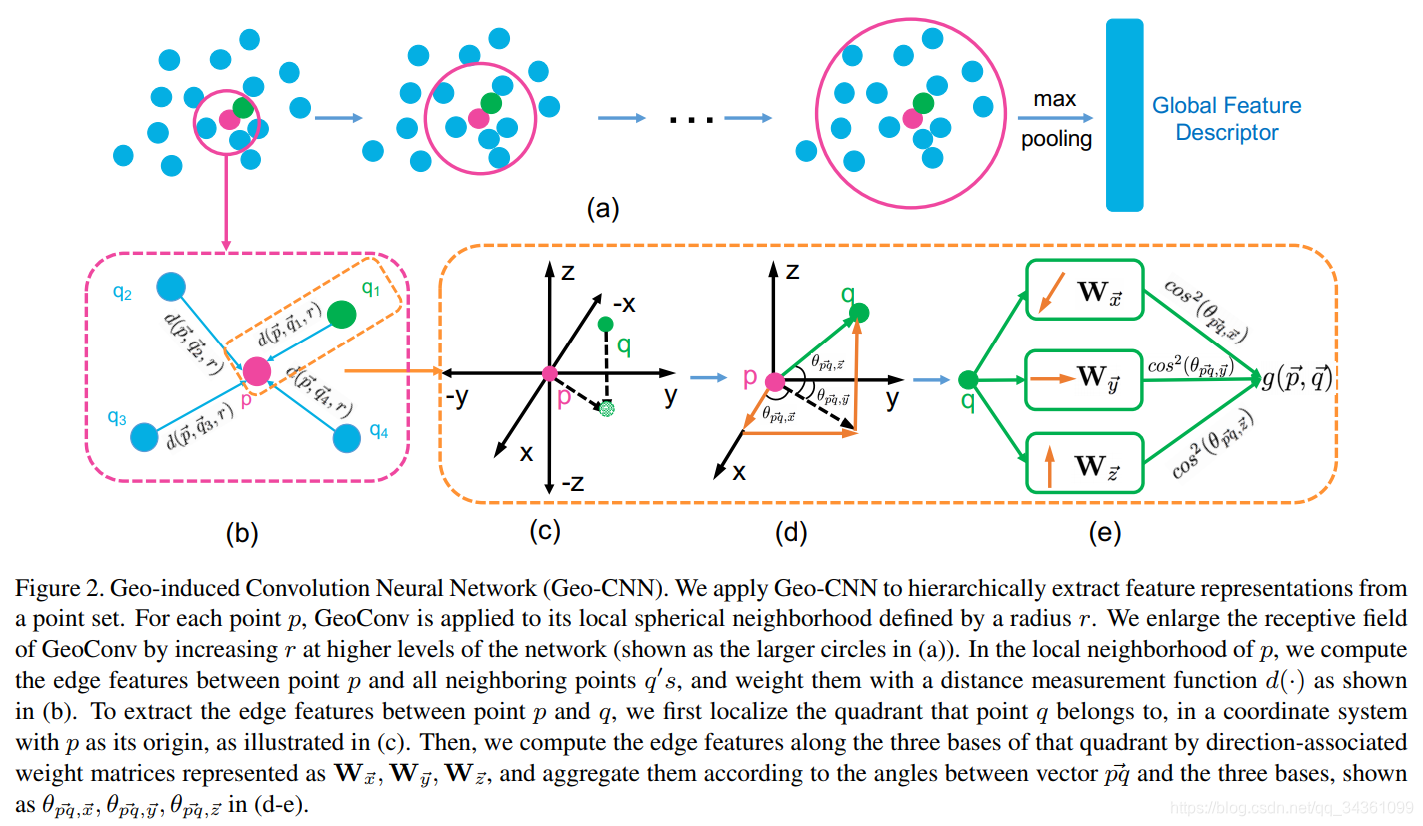
- 改造局部点云中邻点与中心点的特征提取方式:首先将边缘特征提取过程分解成三个正交的基,然后根据边缘向量与基之间的夹角对提取的特征进行聚合。这鼓励了网络在整个特征提取层次中保持欧氏空间的几何结构。
模型流程
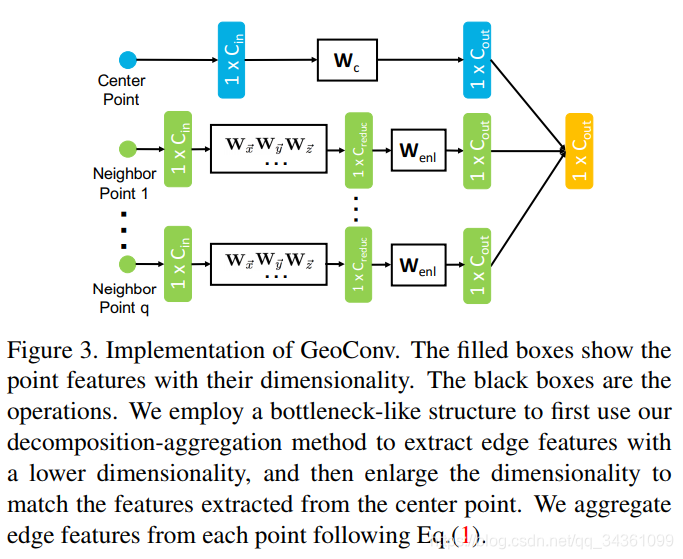
- 简单来说就是作者把边特征看作3个基向量所持有的特征的组合,网络所需要学习的是基向量的特征,而基特征组合成边特征的方式是作者设定的,不可更改的,作者根据几何关系(边的方向、模长)推理组合后的基特征即边特征
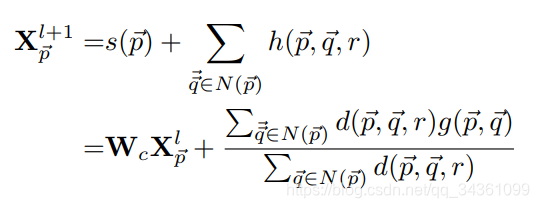
p点在l + 1层的特征 = MLP(前一层特征) + 所有边缘特征g(pq)的加权和
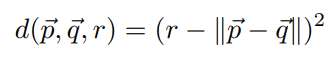
- 权重为
(邻域球半径 - 边的模长)^2
- 这个公式有两个很好的性质:
- 结果随模长单调递减,离球心越近,权重越高
- 当球半径增大时,两个相近邻点与中心点构成的权重差距减小。也就是说感受野扩大时,需要更大的模长差距来获得相同的权重差,要求随感受野扩大
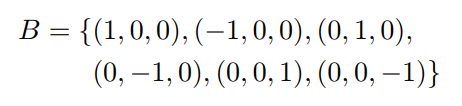
- 作者将欧式坐标系分为6个基向量,分别对应6个不同的权重矩阵
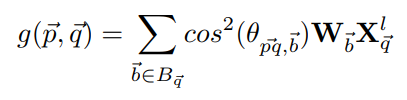
- 每个基向量拥有不同的权重,所以邻点特征
X^l_q可以通过6个不同的全连接层获得按照不同基升维后的结果(只需要用到其中3个)
- 某一条边的特征等于其所在象限对应的3个基特征的加权和,权重为
cos^2(边向量与基向量构成的夹角),即按角度分权,注意3个cos^2的和始终为1

- 这里利用了一个多视图的
trick,就是把整个点云按照z轴旋转获得不同视角v下获得的边权重,然后加权聚合,其中w_v可学习
v取等间隔的10 ~ 40个视角效果差不多,文中约提0.5%
其他
- 整个流程图,这里的
θ好像画错地方了,不过下面的解释没问题
疑惑
- 这种操作是怎么减轻过拟合的?方差越大就约容易过拟合?
- 为什么将坐标轴分为正负轴,构造6个基向量?
发布了16 篇原创文章 ·
获赞 12 ·
访问量 9708
转载自blog.csdn.net/qq_34361099/article/details/104219418
