PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling (CVPR 2020)
本文介绍一篇cvpr2020里面关于点云识别的文章。
论文
代码
1. 问题
解决有噪声情况下的点云处理问题
刚开始看见这个问题觉得还蛮吸引人的。
2. 思想
提出两个模块来解决噪声情况下的点云处理问题,分别是adaptive sampling (AS) 和local nonlocal (L-NL) module。

其中基础模块local nonlocal (L-NL) 包含了Point Local (PL) cell 和Point NonLocal (PNL) cell。
3. 模块
3.1 Adaptive Sampling (AS) Module


就是point attention, 这里被他包装成adaptive sampling。根本就没有sampling的操作,这个模块的输入是FPS后的采样结果。他将point attention理解成了一种修正和移位,使点云变得更紧凑。
3.2 local nonlocal (L-NL) module
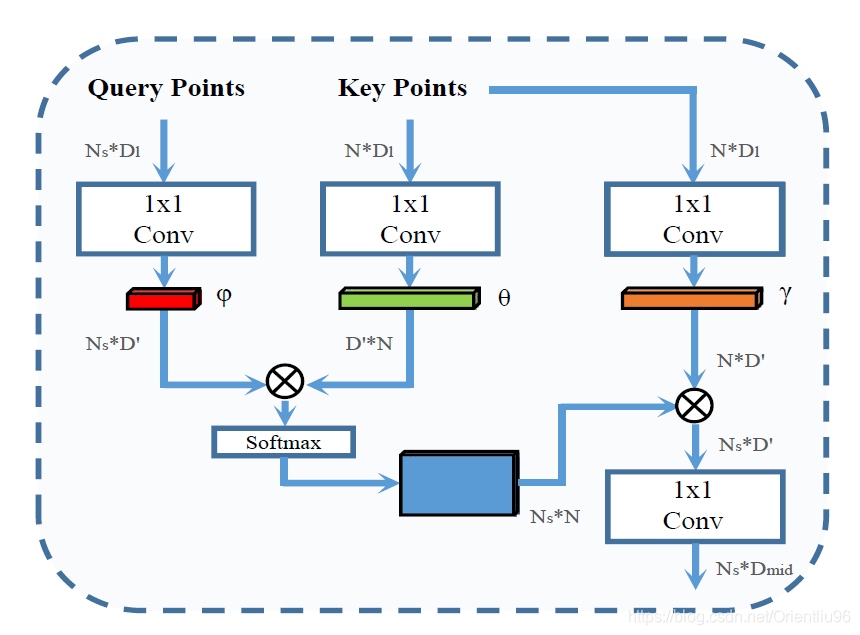
这个Point NonLocal (PNL) cell 和DPAM(ICCV2019)论文的思想比较像,遗憾的是DPAM到现在也没有开源代码,我自己复现这种操作达不到论文中的效果。细节上可能有差异,但是这种想法和思路不算独创了。
最后呢,给出一种融合的机制
Local-NonLocal (L-NL) Fusion
4 实验结果
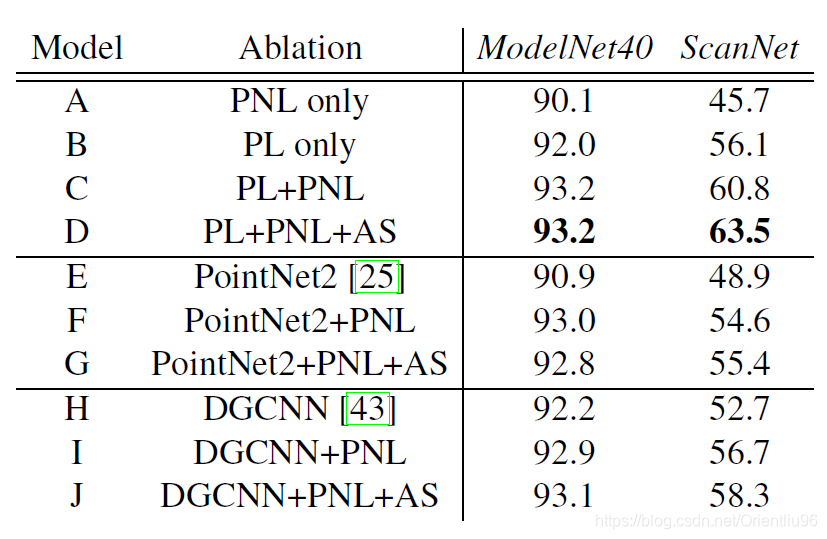
分类精度还不错,但是贯穿全文也没有找到整个分类网络的架构,不知道是否是故意为之。
这里还有个挺让我诟病的实验
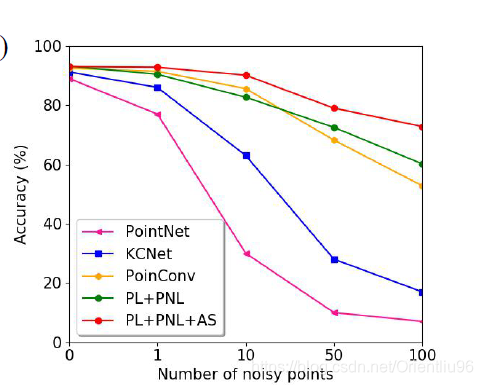
为了说明自己的架构更能抵抗位移噪声,也算是对应题目吧。他选择了PointNet,KCNet进行噪声的测试,但是人家都是三年前的架构了,这么对比合适吗?而且看PointCov抗位移噪声的性能还是不错的,因此并不能有力的证明本文提出的两个模块可以很好的抵抗位移噪声。我推测DGCNN的抵抗能力应该很强,所以这篇文章没有和他进行对比。
总结
文章包装的不错,提出的两个模块能提点是毋庸置疑的,但是不能认定因为这两个模块具有增强抵抗噪声的能力。换个角度讲,如果这篇论文没有包装在抵抗噪声的问题下,不太可能被接受,因为这两个模块的创新性不足。但是,他成功的将AS抽象成位移的修正,那么就显得比较新颖了,给人眼前一亮。
所以,论文的包装和整体的逻辑架构很重要啊,向他学习。
