1 前言
基于骨架的动作识别(Skeleton-Based Action Recognition)主要任务是从一系列时间连续的骨骼关键点(2D/3D)中识别出正在执行的动作。因为牵涉到骨骼框架这种图结构的输入,采用GCN的方法逐渐成为了主流,并取得了不错的效果。
在学习ST-GCN之前,我在网上找了一些GCN相关的教程与文章进行了学习,现将推荐的系列文章整理如下,大家自行翻阅:
比较通俗易懂的GCN解析
(https://www.zhihu.com/question/54504471/answer/611222866)
比较完整的GCN解析
(https://zhuanlan.zhihu.com/p/90470499)
这里我稍微总结下基础的GCN步骤(假设图输入为),可以视为
对图输入进行特征提取(假设参数为),输出。微观来看,这个特征提取可以理解为对图上每个节点的特征进行了分别提取,其特征维度从变化到;
根据图结构中建立一个邻接矩阵,并对其进行归一化or对称归一化,获得;
利用归一化的邻接矩阵对提取后的特征进行聚合,聚合的结果为。
这样一来,基本的图卷积运算就实现了。其具体的实现代码如下所示:
class GraphConvolution(nn.Module):
def __init__(self, input_dim, output_dim, use_bias=True):
"""图卷积:L*X*\theta
Args:
----------
input_dim: int
节点输入特征的维度
output_dim: int
输出特征维度
use_bias : bool, optional
是否使用偏置
"""
super(GraphConvolution, self).__init__()
self.input_dim = input_dim
self.output_dim = output_dim
self.use_bias = use_bias
self.weight = nn.Parameter(torch.Tensor(input_dim, output_dim))
if self.use_bias:
self.bias = nn.Parameter(torch.Tensor(output_dim))
else:
self.register_parameter('bias', None)
self.reset_parameters()
def reset_parameters(self):
init.kaiming_uniform_(self.weight)
if self.use_bias:
init.zeros_(self.bias)
def forward(self, adjacency, input_feature):
"""邻接矩阵是稀疏矩阵,因此在计算时使用稀疏矩阵乘法
Args:
-------
adjacency: torch.sparse.FloatTensor
邻接矩阵
input_feature: torch.Tensor
输入特征
"""
device = "cuda" if torch.cuda.is_available() else "cpu"
support = torch.mm(input_feature, self.weight.to(device))
output = torch.sparse.mm(adjacency, support)
if self.use_bias:
output += self.bias.to(device)
return output言归正传,我们先从ST-GCN说起,其论文名和代码链接如下:
论文名:Spatial Temporal Graph Convolutional Networks for Skeleton-Based Action Recognition
代码地址:https://github.com/yysijie/st-gcn
网上也有部分小伙伴做了相关的解析,觉得挺不错的,链接如下:
https://www.zhihu.com/question/276101856/answer/638672980
下面我们将从(1)数据输入(2)网络结构两方面,通过结合论文和代码对ST-GCN进行解析。
2. 数据输入
2.1 数据结构
基于骨架的动作识别方法的一般输入为时间连续的人体骨架关键点,如下图1所示。
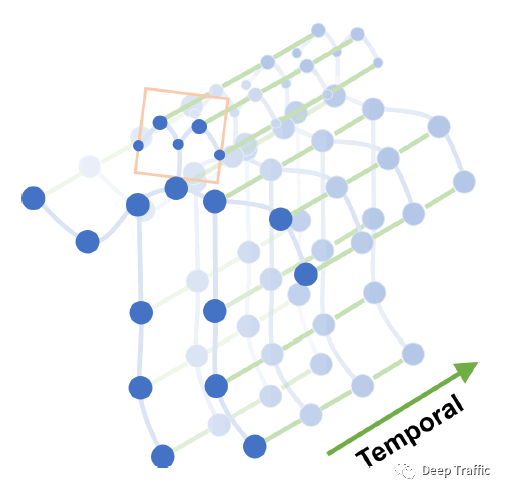
这些关键点可以通过openpose进行姿态估计获取,也可以手动标注。其数据维度一般为(N, C, T, V, M ),其中(参考上述引用知乎文章):
“
N代表视频的数量,通常一个 batch 有 256 个视频(其实随便设置,最好是 2 的指数);
C代表关节的特征,通常一个关节包含x,y,acc 等 3 个特征(如果是三维骨骼就是 4 个),x,y为节点关节的位置坐标,acc为置信度。
T 代表关键帧的数量,一般一个视频有 150 帧。
V 代表关节的数量,通常一个人标注 18 个关节。
M代表一帧中的人数,一般选择平均置信度最高的 2 个人。
需要注意C(特征),T(时间),V(空间)。
2.2 数据预处理
事实上,上述输入数据(N, C, T, V, M )在输入至ST-GCN网络之前需要进行标准化操作。
该标准化是在时间维度上进行的,具体来说,就是标准化某节点在所有T个关键帧的特征值。其具体实现代码如下:
# data normalization
N, C, T, V, M = x.size()
x = x.permute(0, 4, 3, 1, 2).contiguous()
x = x.view(N * M, V * C, T)
x = self.data_bn(x)
x = x.view(N, M, V, C, T)
x = x.permute(0, 1, 3, 4, 2).contiguous()
x = x.view(N * M, C, T, V)其中函数data_bn定义如下:
self.data_bn = nn.BatchNorm1d(in_channels * A.size(1))2.3 图划分策略
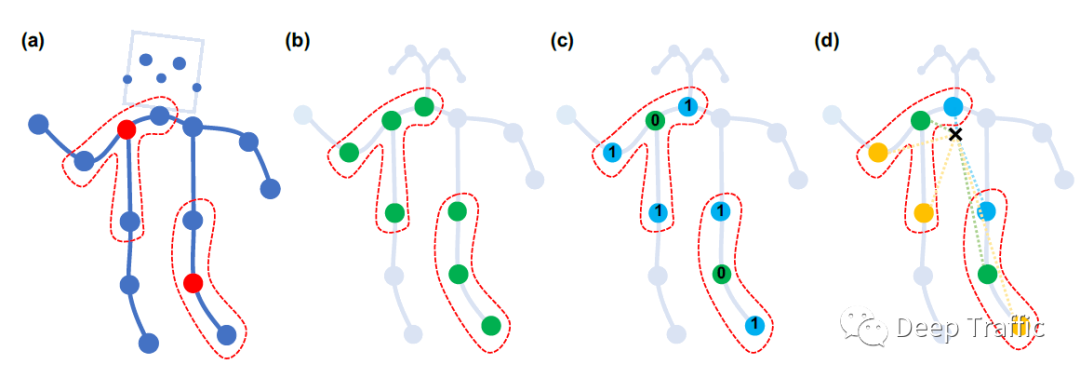
在ST-GCN这篇文章中,作者的另一大创新点是通过对运动的分析引入了图划分策略,即建立多个反应不同运动状态(如静止,离心运动和向心运动)的邻接矩阵。作者在原文中提到其采用了三种不同的策略,分别为:
Uni-labeling,即与跟根节点相邻的所有结点具有相同的label,如下图b所示。
Distance partitioning,即根节点本身的label设为0,其邻接点设置为1,如下图c所示。
Spatial configuration partitioning,是本文提出的图划分策略。也就是以根节点与重心的距离为基准(label=0),在所有邻接节点到重心距离中,小于基准值的视为向节心点(label=1),大于基准值的视为离心节点(label=2)。
具体的代码实现如下:
A = []
for hop in valid_hop:
a_root = np.zeros((self.num_node, self.num_node))
a_close = np.zeros((self.num_node, self.num_node))
a_further = np.zeros((self.num_node, self.num_node))
for i in range(self.num_node):
for j in range(self.num_node):
if self.hop_dis[j, i] == hop:
if self.hop_dis[j, self.center] == self.hop_dis[
i, self.center]:
a_root[j, i] = normalize_adjacency[j, i]
elif self.hop_dis[j, self.
center] > self.hop_dis[i, self.
center]:
a_close[j, i] = normalize_adjacency[j, i]
else:
a_further[j, i] = normalize_adjacency[j, i]
if hop == 0:
A.append(a_root)
else:
A.append(a_root + a_close)
A.append(a_further)
A = np.stack(A)值得注意的是,hop类似于CNN中的kernel size。hop=0就是根节点自身,hop=1表示根节点与其距离等于1的邻接点们,也就是上图(a)的红色虚线框。
为了便于更好理解代码,我们默认上述两个循环中的为根节点。因为条件***if self.hop_dis[j, i] == hop***限制,可以视为根节点的本身(hop=0)或者其邻接节点(hop=1)。
3. 网络结构
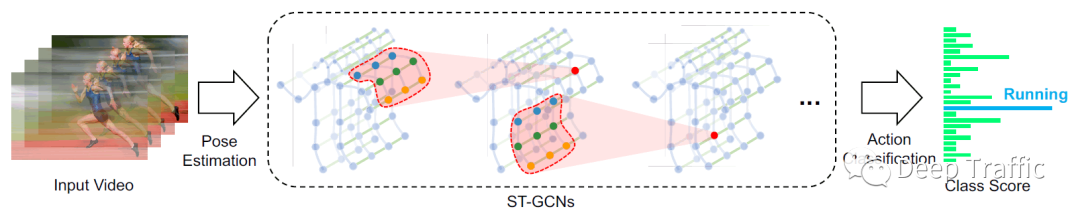
骨架输入数据具有时间与空间属性,这些属性对运动检测至关重要。因此提出ST-GCN应当具备能够从时空维度提取特征的能力,其在GCN中的表现就是能够同时聚合时空维度的信息,如下图所示。
更具体地,我们给出了ST-GCN具体的结构图,如下图所示。
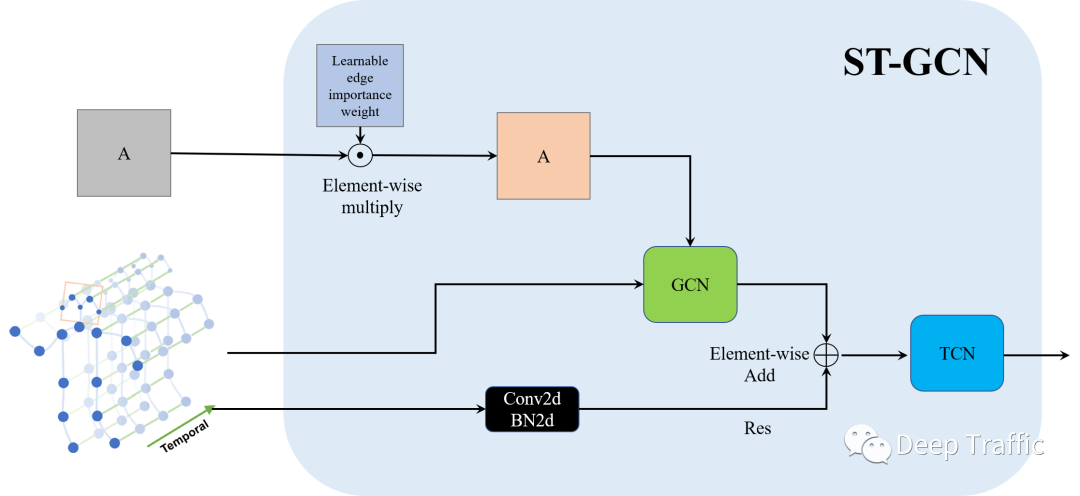
其具体可以分为以下步骤:
步骤1:引入一个可学习的权重矩阵(与邻接矩阵等大小)与邻接矩阵按位相乘。该权重矩阵叫做“Learnable edge importance weight”,用来赋予邻接矩阵中重要边(节点)较大的权重且抑制非重要边(节点)的权重。
步骤2:将加权后的邻接矩阵与输入送至GCN中进行运算。同时,作者还引入了残差结构(一个CNN+BN)计算获得Res,与GCN的输出按位相加,实现空间维度信息的聚合。
步骤3:利用TCN网络(实际上是一种普通的CNN,在时间维度的kernel size>1)实现时间维度信息的聚合。
上述ST-GCN模块的代码实现如下:
def forward(self, x, A):
res = self.residual(x)
x, A = self.gcn(x, A)
x = self.tcn(x) + res
return self.relu(x), A其中残差结构self.residual定义如下:
self.residual = nn.Sequential(
nn.Conv2d(
in_channels,
out_channels,
kernel_size=1,
stride=(stride, 1)),
nn.BatchNorm2d(out_channels),
)GCN定义如下:
self.conv = nn.Conv2d(
in_channels,
out_channels * kernel_size,
kernel_size=(t_kernel_size, 1),
padding=(t_padding, 0),
stride=(t_stride, 1),
dilation=(t_dilation, 1),
bias=bias)
def forward(self, x, A):
assert A.size(0) == self.kernel_size
x = self.conv(x)
n, kc, t, v = x.size()
x = x.view(n, self.kernel_size, kc//self.kernel_size, t, v)
x = torch.einsum('nkctv,kvw->nctw', (x, A))
return x.contiguous(), ATCN定义如下
self.tcn = nn.Sequential( nn.BatchNorm2d(out_channels), nn.ReLU(inplace=True), nn.Conv2d( out_channels, out_channels, (kernel_size[0], 1), (stride, 1), padding, ), nn.BatchNorm2d(out_channels), nn.Dropout(dropout, inplace=True), )
实际上,本文提出模通过不断堆叠ST-GCN从图结构输入中持续提取高级的语义特征,具体如下:
self.st_gcn_networks = nn.ModuleList((
st_gcn(in_channels, 64, kernel_size, 1, residual=False, **kwargs0),
st_gcn(64, 64, kernel_size, 1, **kwargs),
st_gcn(64, 64, kernel_size, 1, **kwargs),
st_gcn(64, 64, kernel_size, 1, **kwargs),
st_gcn(64, 128, kernel_size, 2, **kwargs),
st_gcn(128, 128, kernel_size, 1, **kwargs),
st_gcn(128, 128, kernel_size, 1, **kwargs),
st_gcn(128, 256, kernel_size, 2, **kwargs),
st_gcn(256, 256, kernel_size, 1, **kwargs),
st_gcn(256, 256, kernel_size, 1, **kwargs),
))
# initialize parameters for edge importance weighting
if edge_importance_weighting:
self.edge_importance = nn.ParameterList([
nn.Parameter(torch.ones(self.A.size()))
for i in self.st_gcn_networks
])
else:
self.edge_importance = [1] * len(self.st_gcn_networks)
# ST-GCN与可学习的权重矩阵不断重复与堆叠
for gcn, importance in zip(self.st_gcn_networks, self.edge_importance):
x, _ = gcn(x, self.A * importance)之后,和一般的分类任务类似,作者引入了全局平均池化以及全卷积层输出预测分支,如下:
# global pooling
x = F.avg_pool2d(x, x.size()[2:])
x = x.view(N, M, -1, 1, 1).mean(dim=1)
# prediction
x = self.fcn(x)
x = x.view(x.size(0), -1)至此,通过代码我们就很容易理解ST-GCN的具体网络结构了。
总结
至此,关于ST-GCN的解析就完毕了,希望能够帮助到大家!也欢迎大家关注我的微信公众号!
推荐阅读:
什么是时空序列问题?这类问题主要应用了哪些模型?主要应用在哪些领域?
公众号:AI蜗牛车
保持谦逊、保持自律、保持进步

发送【蜗牛】获取一份《手把手AI项目》(AI蜗牛车著)
发送【1222】获取一份不错的leetcode刷题笔记
发送【AI四大名著】获取四本经典AI电子书