E.4 GNSS卫星星历表和时钟
主要是RTKLIB ver. 2.4.2 Manual E.4的翻译.
目录
RTKLIB支持GPS、GLONASS、Galileo、QZSS、北斗和SBAS的广播星历和时钟。它还支持精确的星历表和时钟,如SP3‐c[22]和时钟RINEX[15],包括伽利略,QZSS和北斗的后处理模式。对于实时模式,还支持由SBAS长期快速校正和RTCM 3 SSR(状态空间表示)校正校正的广播星历表和时钟。下面的方程显示了RTKLIB中使用的星历和时钟模型。
(1) GPS、Galileo和QZSS的广播星历表和时钟
GPS、Galileo和QZSS的广播星历和SV时钟参数在导航电文中给出如下:
p e p h ( t o e , t o c , I D O ) = ( a , e , i 0 , Ω 0 , ω , M 0 , Δ n , I ˙ , Ω ˙ , C u s , C u c , C r s , C r c , C i s , C i c , a f 0 , a f 1 , a f 2 , T G D ) T p_{eph}(t_{oe},t_{oc},IDO)=(a,e,i_0,\Omega_0,\omega,M_0,\Delta n,\dot{I},\dot\Omega,C_{us},C_{uc},C_{rs},C_{rc},C_{is},C_{ic},af_0,af_1,af_2,T_{GD})^T peph(toe,toc,IDO)=(a,e,i0,Ω0,ω,M0,Δn,I˙,Ω˙,Cus,Cuc,Crs,Crc,Cis,Cic,af0,af1,af2,TGD)T
利用这些参数计算出ECEF中的卫星位置(天线相位中心位置) r s ( t ) r^s(t) rs(t),卫星时钟偏差 d T s ( t ) dT^s(t) dTs(t)和时钟漂移 d T ˙ s ( t ) d\dot{T}^s(t) dT˙s(t)为:
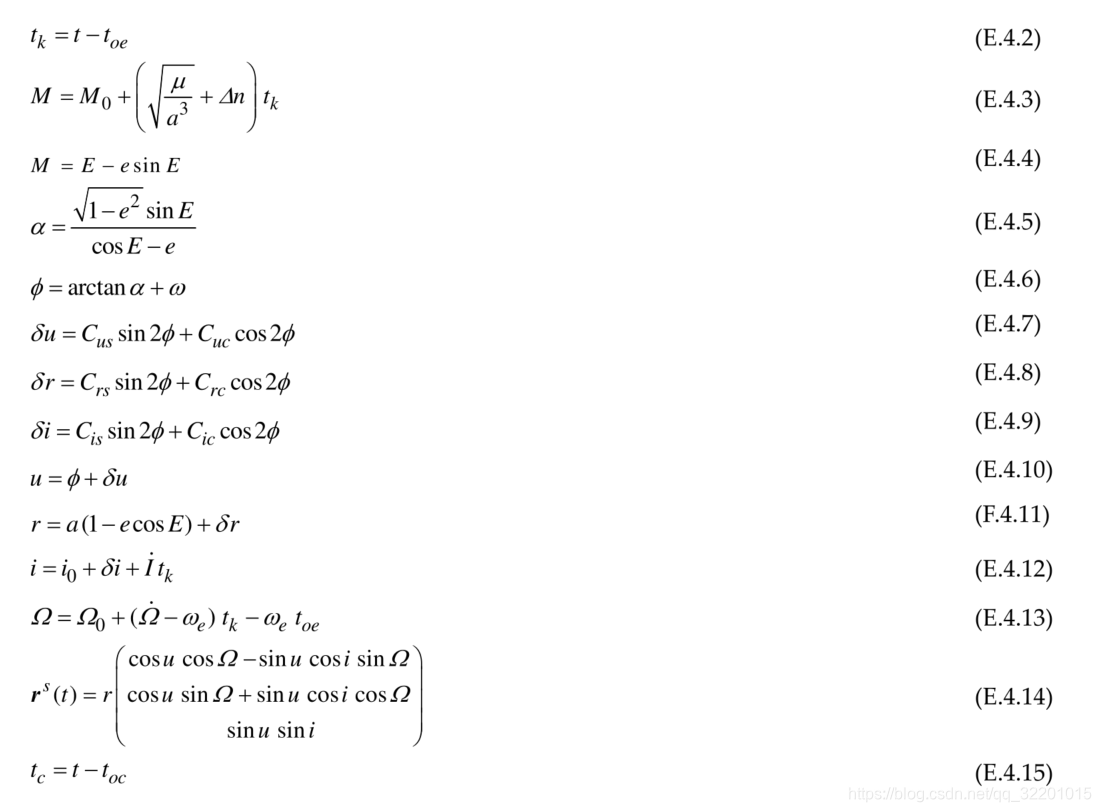

其中:
μ \mu μ:地球引力常数( 3.9860050 ∗ 1 0 14 m 3 / s 2 3.9860050*10^{14}m^3/s^2 3.9860050∗1014m3/s2for GPS and QZSS, 3.986004418 ∗ 1 0 14 m 3 / s 2 3.986004418*10^{14}m^3/s^2 3.986004418∗1014m3/s2for Galileo)
ω e \omega_e ωe:地球角速度(7.2921151467*10-5rad/s)
b = f 1 2 / f i 2 b=f_1^2/f_i^2 b=f12/fi2for L i L_i Li的伪距
T G D T_{GD} TGD:GPS and QZSS的群延迟参数,对 B G D B_{GD} BGD for galileo
开普勒方程(E.4.4)可以用牛顿ʹ的方法进行以下迭代求解。

如果处理选项为ʺSatellite Ephemeris/ clockʺ到ʺbroadcastʺ,包括GLONASS、北斗和SBAS,则应用广播星历表和时钟。
(2)GLONASS广播星历表和时钟参数
在导航消息中给出如下:
p e p h ( t b ) = ( x , y , z , v x , v y , v z , a x , a y , a z , τ n , γ n ) p_{eph}(t_b)=(x,y,z,v_x,v_y,v_z,a_x,a_y,a_z,\tau_n,\gamma_n) peph(tb)=(x,y,z,vx,vy,vz,ax,ay,az,τn,γn)
ECEF (PZ90.02)中卫星位置 r s ( t ) = ( x , y , z ) T r^s(t)=(x,y,z)^T rs(t)=(x,y,z)T和速度 v s ( t ) = ( v x , v y , v z ) T v^s(t)=(v_x,v_y,v_z)^T vs(t)=(vx,vy,vz)T的差分方程可以表示为:
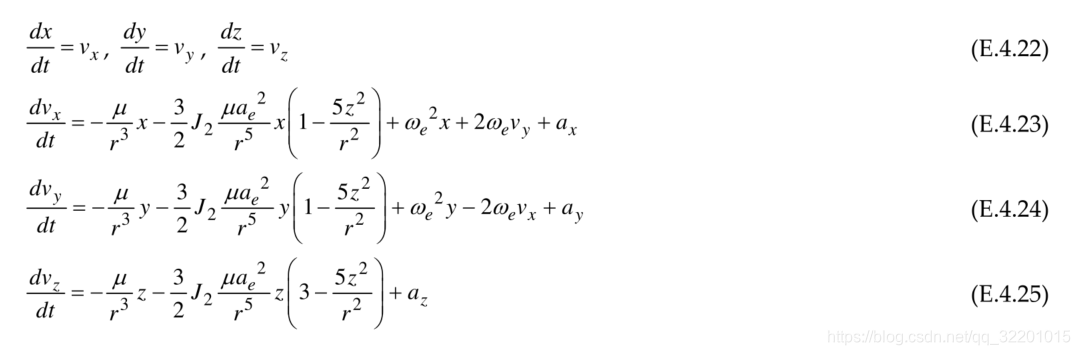
式中:
a e a_e ae:地球半长轴(6378136.0 m)
μ \mu μ:地球引力常数(9 398600.44109m3/s2)
ω e \omega_e ωe:地球角速度(7.29211510-5rad/s)
J 2 J_2 J2:地球位势的二次纬向谐波(1082625.7*10-9)
r = x 2 + y 2 + z 2 r=\sqrt{x^2+y^2+z^2} r=x2+y2+z2
注意,GLONASS ICD 5.1[4]的A.3.1.2中的两个勘误表已在上述模型中进行了修正。
在时间t时卫星的位置 r s ( t ) r^s(t) rs(t)和速度 v s ( t ) v^s(t) vs(t)可以通过RK4(龙格库塔第四阶和阶段)推导来解决这些微分方程数值积分与最初的卫星位置 r s ( t b ) r^s(t_b) rs(tb)和速度 v s ( t b ) v^s(t_b) vs(tb)的参考时间 t b t_b tb。在历元时刻t的卫星时钟偏差 d T s ( t ) dT^s(t) dTs(t) 和漂移 d T ˙ s ( t ) d\dot{T}^s(t) dT˙s(t)也可推导为:

GLONASS时钟参数中包含了卫星时钟中的相对论效应。所以在这种情况下,相对论修正是不适用的。
(3)北斗的广播星历表和时钟
北斗卫星导航信息中提供了与GPS、Galileo、QZSS类似的星历表和时钟参数如下:

对于北斗的MEO和IGSO卫星,除 μ = 3.986004418 × 1 0 14 , ω e = 7.2921150 × 1 0 − 5 r a d / s \mu=3.986004418\times10^{14},\omega_e= 7.2921150\times10^{-5}rad/s μ=3.986004418×1014,ωe=7.2921150×10−5rad/s,时间t用BDT表示外,GPS星历和时钟公式与(1)相同。

其中:
(4)SBAS卫星的广播星历表和时钟
SBAS地理卫星的导航消息参数在SBAS消息(消息类型9)中给出如下:
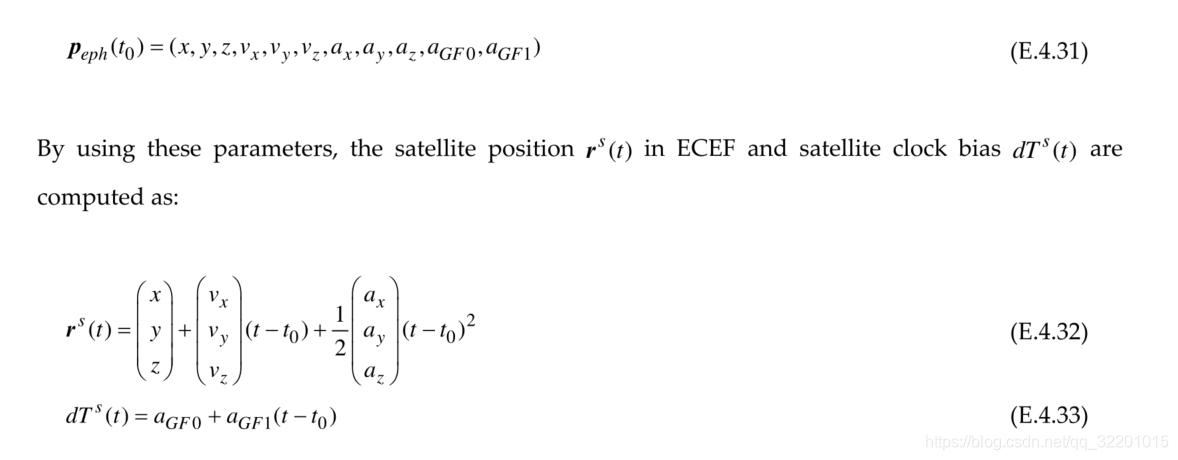
(5) SBAS轨道和时钟校正
SBAS轨道和时钟校正定义为以下参数。
(6)精确星历表和时钟
GPS、GLONASS、伽利略、QZSS和北斗的精确星历表通常以SP3‐c文件的形式每15分钟或5分钟提供一次,包含卫星位置和速度(可选)。为了得到t时刻的卫星位置,需要进行适当的插值。RTKLIB使用固定度(10 n)多项式插值,通过Newton‐Nevilleʹ算法为:
…
(7) RTCM SSR轨道和时钟校正
RTCM SSR轨道和时钟校正定义为以下参数。
…