基于解剖特征的ACL重建机器人定位系统
An ACL reconstruction robotic positioning system based on anatomical characteristics
ACL重建,手术机器人,解剖特征
Recommended by Deming Guo
摘要
为了提高前交叉韧带 (ACL)重建隧道定位的准确性,我们提出了一种基于解剖特征的 ACL重建机器人定位系统。该系统包括术前路径规划系统、术中路径规划系统和导航定位系统。Brahmet线、前、后皮质线用于术前CT图像和术中x线图像的配准。应用新型c臂标定器建立医学图像与手术空间的映射关系。ACL重建隧道可由机器人解剖构建。该路径规划系统在4个干骨实验中精度为1.73 mm,在2个尸体实验中精度为2.17 mm。精度满足ACL构建手术的精度要求。
材料和方法
基于骨解剖标志的3-D 和 2-D配准
标准AP和LAT投影x线图像是运动医学外科常用的方法:标准AP x线图像中,髁突前内侧与髁突前外侧相互重叠;标准LAT x线片胫骨前后缘重叠,胫骨髁间棘位于股骨髁间窝正中。
术前CT数据和术中x线图像中,骨解剖标志与ACL隧道起始点和结束点在AP和LAT投影处的关系相同,因此我们可以建立基于骨解剖标志的三维和二维配准方法。
2-D配准
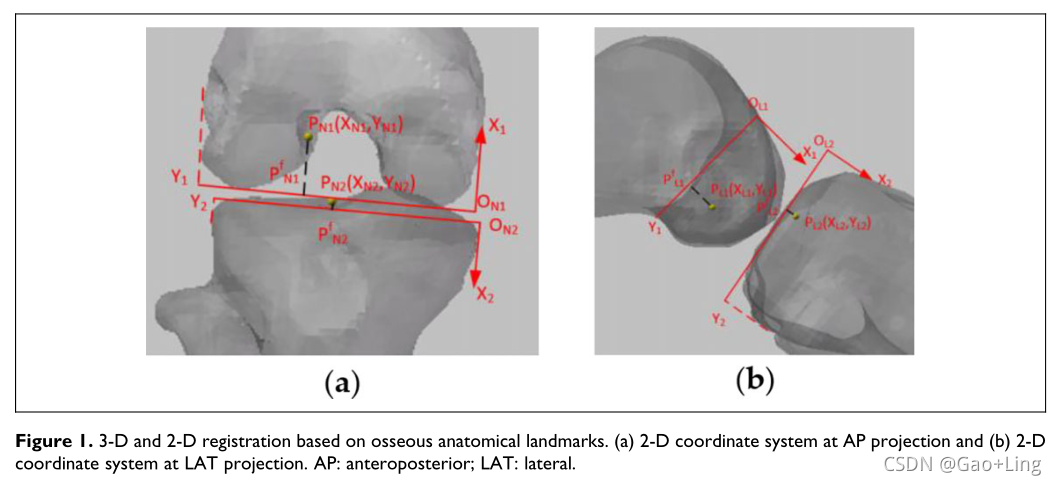
bird研究了一种新的测量技术,基于识别关节软骨的近端边界,并使用一种特定的尺子平行于股轴来定位ACL的起源。在标准AP和LAT投影下,基于Brahmet线可以构建股骨二维坐标系,基于皮质前后线可以构建胫骨二维坐标系(图1):on1x1y1和o2x2y2表示股骨和胫骨在AP投影下的二维坐标系,ol1x1y1和ol2x2y2分别为股骨和胫骨在LAT投影处的二维坐标系,pn1和pl1分别为股骨在标准AP和LAT投影处的端点;pn2、pl2分别为胫骨标准AP和LAT终点;Pf n1、Pf l1分别为股骨标准AP和LAT终点单轴的终点;pf n2和pf l2分别表示胫骨终点在标准AP和LAT处的仅轴投影。以y方向上的最大骨长为单位。如果{prof}表示投影方向{n} {L},则pn1,PL1,PN2;和pl2的归一化坐标可计算如下

术前CT资料与术中x线影像的关系
术前利用CT数据在ACL路径规划系统中规划股骨和胫骨终点坐标。根据“二维坐标系”部分的方法,计算出术前二维坐标系中规划点在标准AP和LAT投影处的归一化坐标,并建立术中二维坐标系。如果{pref}和{in}分别表示术前和术中坐标系统,则术中x线图像计划点归一化坐标表示为

其中{pref}表示投影方向{N}or{L}。
校准的c臂
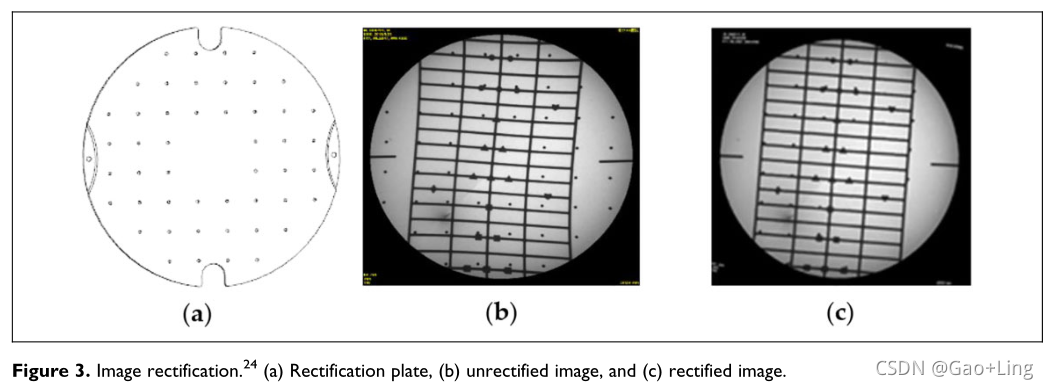
c臂的标定是建立手术空间与x线影像空间的映射关系。它是外科手术导航系统所必需的。x射线成像过程中的几何畸变(图3(b))影响c臂标定精度。为了提高对目标的标定精度,我们开发了点分布锥形螺旋(UDCSC)校准器(图2(a))。244个视觉标记分布在导航校正器的四个平面上(图2(b))。12个直径为4mm的钢球嵌入校准器中,作为校准的基准点(图2©)。校准器可以放置在膝关节上,本文将其用于提高c臂的校准精度。

为了纠正x射线成像过程中的几何畸变,采用基于多项式拟合的全局校正方法对c臂x射线图像进行校正。c臂接收端固定均匀分布有48个钢球的整流板(图3(a))。
经过图像畸变校正后,可以认为c臂是一种理想的针孔模型。11针孔模型的内、外参数可以通过直接线性变换计算得到。如果x射线图像中的pa和pl是AP和LAT投影中同一空间点P的投影点,p的世界坐标可以通过反投影模型计算出来。
An ACL RRPS
ACL RRPS包括术前路径规划系统、术中路径规划系统和导航定位系统。
术前计划系统
通过基于Qt框架的C++,开发了ACL重建术前规划软件(图4(a))。使用VTK和CTK来实施3D模型。对于ACL重建隧道的解剖定位,ACL隧道的终点应规划在解剖位置。Ferretti等人,Edwards等人和Siebold等人对股骨终点的位置进行了研究。根据他们的结果,我们可以在这个系统中规划股骨和胫骨的端点(图4(b)和(c))。通过“2D坐标系”章节的方法,计算出股骨、胫骨各终点的术前归一化坐标。

术中规划系统
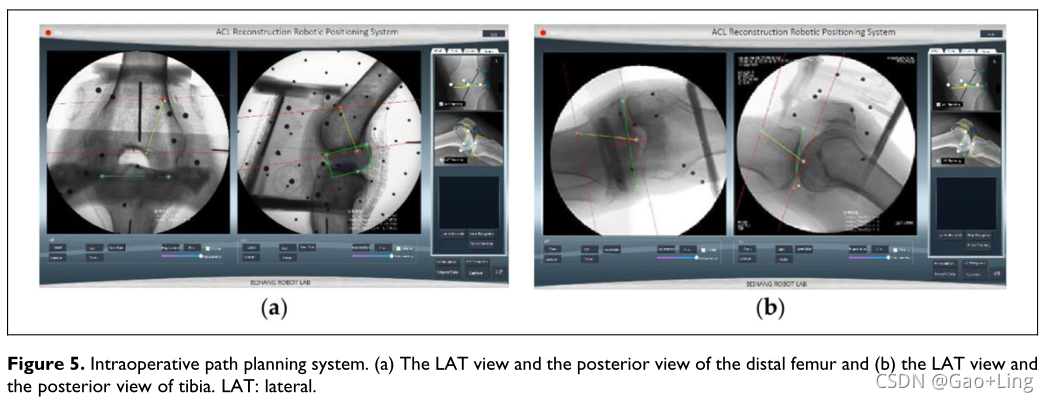
如图5所示,黄色虚线为规划的股骨隧道,绿色、蓝色、红色虚线段为规划终点的辅助线。红色直虚线为规划点在选定透视下的视线,该视线可用于绘制AP和LAT图像中的规划点。通过“2D坐标系”章节的方法,可建立术中2D坐标系。通过“术前CT数据与术中x线图像的关系”章节的方法,可以计算出股骨和胫骨的术中终点坐标归一化。
导航定位系统
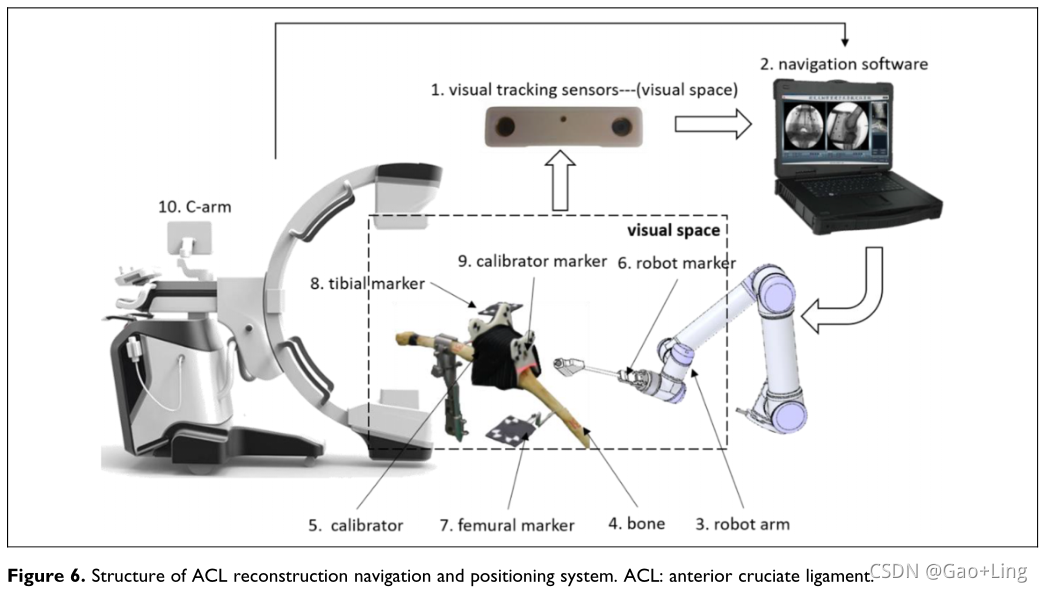
ACL重建导航定位系统的结构
ACL重建导航和定位系统(图6)由一个视觉跟踪传感器visual tracking sensors(Micron Tracker, Claron Technology Inc., Canada)、一个导航软件navigation software、一个机械臂robot arm、一个c臂C-arm和一个c臂校准器calibrator组成。在机械臂的末端执行器上,在校准器上,在胫骨和股骨固定器上都有可视标记。手术空间、机械空间、c臂空间统一为视觉坐标系。在导航软件中,规划好的隧道和位置信息被转换成机器人的动作。机器人手臂可以按照规划的路线移动。
x线图像规划点像素坐标的计算
导航系统需要术中x线图像中术前计划终点的像素坐标。因此,应将终点的归一化坐标转换为像素坐标。将由式(2)计算出的股骨和胫骨端点的归一化二维坐标,转换为由式(1)计算出的股骨和胫骨端点的非归一化二维坐标。如果用Tproi(i=1,2)表示x射线图像的非归一化二维坐标系与像素坐标系之间的变换矩阵,x线图像中股骨和胫骨端点的像素位置可计算如下


公式中的1和2标注分别表示标准AP和LAT x线图像中股骨和胫骨端点的非归一化2D坐标和像素坐标。
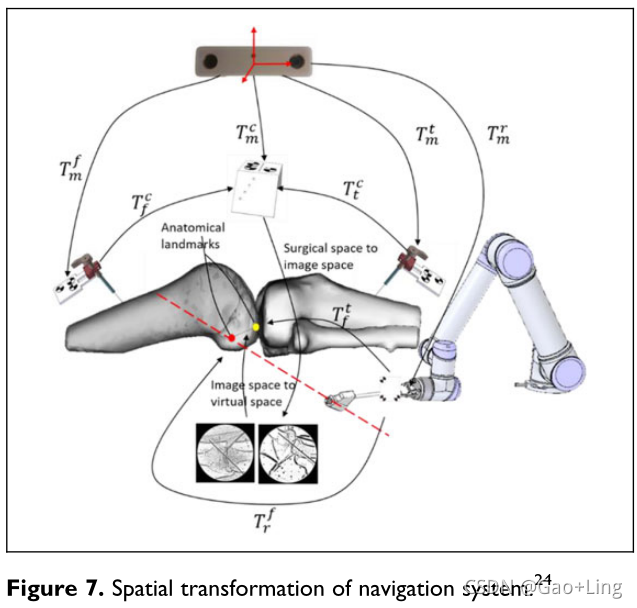
视觉空间规划点的计算
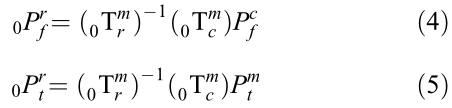
Micron Tracker、机器人、校准器、x线图像、胫骨和股骨的坐标系(图7)分别为{m}、{r}、{c}、{x}、{t}和{f}。p表示点的位置,t表示变换矩阵。PfxAP、PfxLAT、PtxAP和ptxlat分别为股骨和胫骨在AP投影和LAT投影x线图像上的隧道端点。pcf 和 pct可以用反投影模型计算。{i}为采样时间,{0}为记录x线图像的时间。0P0fr 和 0P0tr可以计算如下
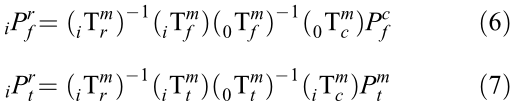
ipifr 和 ipitr可计算如下
目标定位误差
如果APErr 和 LATErr表示终点到导航线的距离,则股骨和胫骨终点的定位误差可表示为:

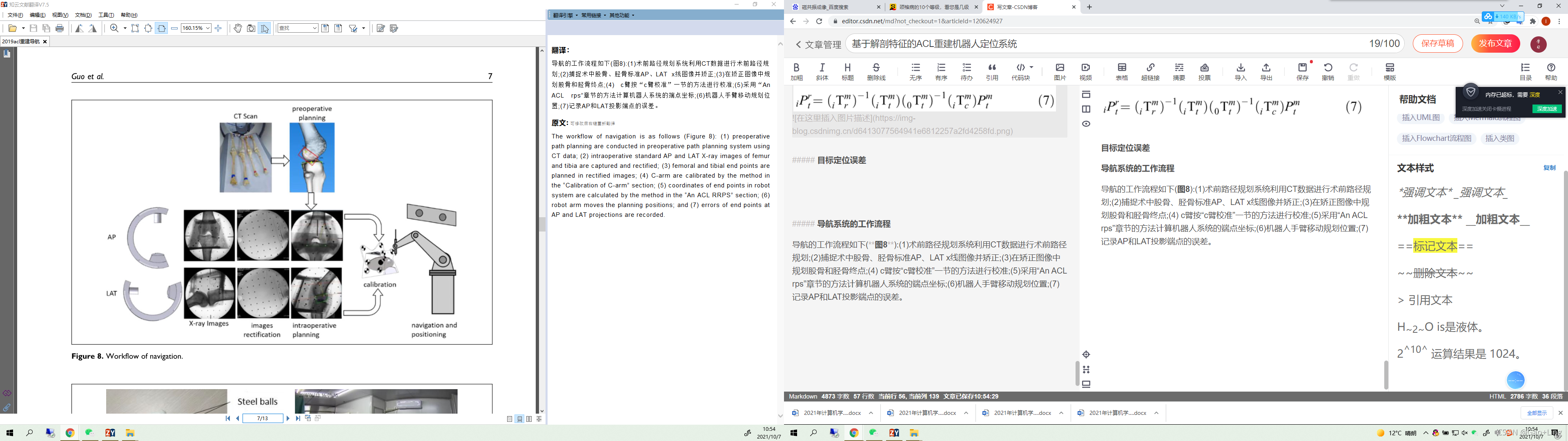
导航系统的工作流程
导航的工作流程如下(图8):(1)术前路径规划系统利用CT数据进行术前路径规划;(2)捕捉术中股骨、胫骨标准AP、LAT x线图像并矫正;(3)在矫正图像中规划股骨和胫骨终点;(4) c臂按“c臂校准”章节的方法进行校准;(5)采用“An ACL rps”章节的方法计算机器人系统的端点坐标;(6)机器人手臂移动规划位置;(7)记录AP和LAT投影端点的误差。