1. 常见定位方案
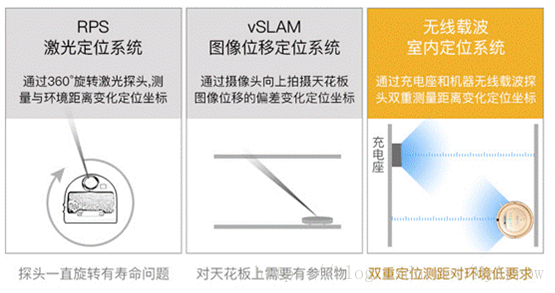

2. RPS激光定位:
- 原理:是通过激光探头360°不断旋转测量扫地机器人与环境距离变化,经过复杂的运算得出扫地机器人与信标(室内的参照物)的相对位置,再代入已知的信标位置坐标,解出机器人的绝对坐标来实现定位。
- 优点:定位的坐标精度高;
- 缺点:探头价格昂贵,而且工作时需要不停地旋转,寿命很有限。
3. vSLAM图像位移定位
- 原理:利用全景图像采集系统并结合图像拼接技术得到球形全景图,配合SIFT特征提取方法提取参照物特征,再利用球形摄像机模型技术及多视图几何约束原理恢复三维信息,并且以扩展卡尔曼滤波与粒子滤波方法进行系统的更新,在复杂未知环境下实现扫地机机器人的自主定位。
- 优点:
- 缺点:算法复杂,对硬件资源要求高,而且还对外界环境要求高,因此这种定位方式对机器人的硬件和参照物特征要求高,定位精度波动性大
4. 无线载波室内定位(室内GPS定位)
- 原理:利用三点式导航的原理,在室内建立一个发射信号的模块,机器人通过测算自身跟该信号的偏移角度来确定自己的位置。根据无线载波探头测量得到的机器人与信标的距离来确定移动中机器人位置的方法。在扫地机器人定位中通过充电座和机器人无线载波探头双重测量距离变化定位坐标。
- 优点:实现方式简单,精度高
5. 总结
- 通过对三种该定位方式实现原理及优劣势的对比不难发现,无线载波室内定位系统综合优势最为明显,也因此有不少品牌选择这一定位方案来帮助扫地机器人实现智能规划清扫。