一、钉钉机器人的实现主要分为三个步骤:
1.钉钉群机器人制作;
2.钉钉群机器人接口开发;
3.服务器shell脚本与计划任务编写。
二、钉钉群机器人的制作
进入要添加机器人的目标群后





到这里群机器人已经添加完成,下面写代码往这个接口发送信息。
三、钉钉群机器人接口开发
我是参照钉钉开放平台的,链接如下:
选择自己适用的编程语言往图5的接口发送post请求即可,我以python为例:
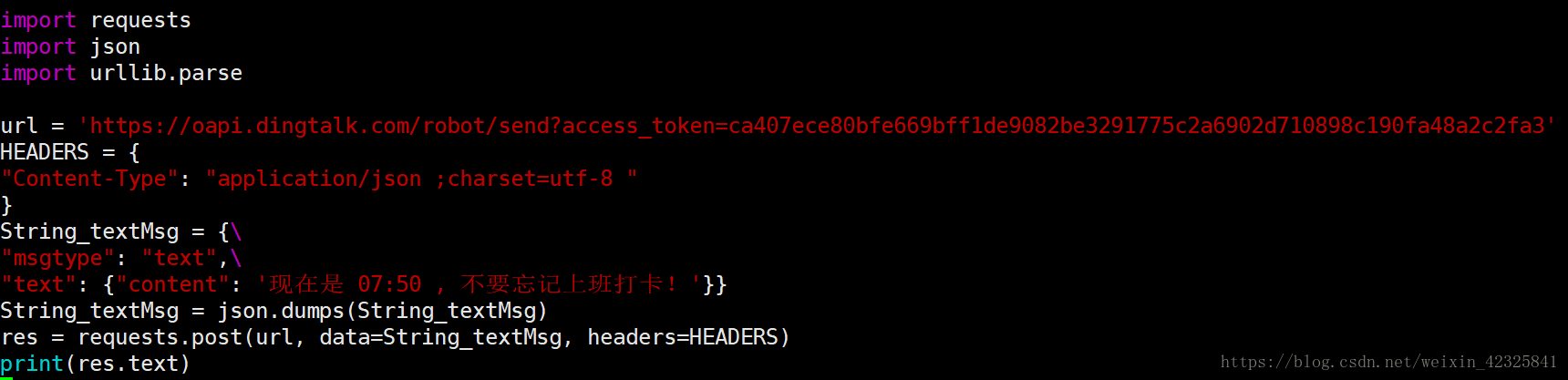
url : 是图5我们复制的webhood;
HEADERS : 不能省略,复制粘贴即可;
String_textMsg : 是我们要发送的消息,注意格式,还能发送图片、超链接等,详情请查阅钉钉开放平台;
封装为json携带参数发送post请求即可。
我们将此python文件命名为dingdingUrl_xinxi_shangban.py,这是上班提醒的接口文件,下班提醒命名为dingdingUrl_xinxi_xiaban.py,接口代码完成后是服务器的相关操作。
四、服务器shell脚本与计划任务编写
1.环境部署
我是用python来写的接口,在服务器需要部署python36的环境,部署方法请参考:
https://www.cnblogs.com/engeng/p/6803061.html
如果你用Java来写的接口,注意在服务器部署JDK环境,部署方法请参考:
https://www.cnblogs.com/manong--/p/8016884.html
2.shell脚本编写
这是我放接口文件的路径,在/root下

执行上班提醒的shell脚本编写如下:

Shell脚本开头以#!/bin/sh开头,不能省略;
python 是要执行的命令;
/root/dingdingUrl_xinxi_shangban.py 是要执行的文件路径,这里必须写绝对路径;
执行下班提醒的shell脚本编写如下:

更多shell知识请参考:
https://blog.csdn.net/birdben/article/category/6355850


