一、说明
本篇文章参考ROS wiki教程
二、msg and srv

参考http://wiki.ros.org/ROS/Tutorials/CreatingMsgAndSrv
在ROS里会经常遇到一种消息类型:Header,包括时间戳和coordinate frame information
[std_msgs/Header]:
uint32 seq
time stamp
string frame_id
三、在包里添加新的msg
-
在包里创建一个msg文件夹,在此文件夹下创建自己的.msg文件
-
在
pakage.xml文件中加入以下依赖<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend> -
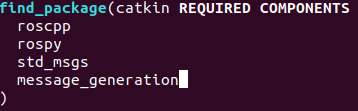
在
CMakeLIsts.txt的find_package中加入message_generation:
-
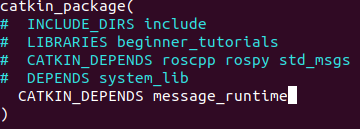
在
CMakeLIsts.txt的catkin_package中加入CATKIN_DEPENDS message_runtime:
-
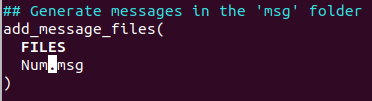
修改
CMakeLIsts.txt的add_message_files,加入自己的.msg文件:
-
把
CMakeLIsts.txt的generate_messages注释去掉:

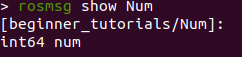
现在msg已经添加到你的包里,可以使用rosmsg show指令来查看
四、在包里添加新的srv
-
在包里创建一个srv文件夹,在srv文件夹下创建自己的.srv文件
-
确保
package.xml文件里有以下语句:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
- 确保
CMakeLists.txt的find_package里有message_generation
(Despite its name, message_generation works for both msg and srv.)
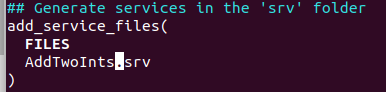
- 去掉
CMakeLists.txt的add_service_files的注释,并加入自己的.srv文件:
现在srv文件已经加入包里,可以使用rossrv show查看:
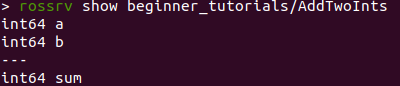
不记得包的名字也可以直接使用 *rosmsg show 和 rossrv show *
- 确保把
CMakeLIsts.txt的generate_messages注释去掉:
最后需要回到catkin_workspace的根目录,执行catkin_make
